一种基于雷达数据融合的航班4D航迹预测方法
2019-10-08韩剑峰


摘 要:4D航迹预测是空管自动化系统及流量管理系统的一项核心技术,能够提高空域的利用率和安全性。本文提出了一种4D航迹预测方法,结合多数据源雷达、气象、航班计划、航空器性能等数据,利用飞行经验样本推测各时间点的航空器位置,从而得出航空器的飞行轨迹与时间的精准预测。通过在华东空管流量管理系统及空管自动化系统中的应用效果,说明该方法的实用性和有效性。
关键词:雷达数据融合;航迹预测;空管流量;空管自动化
中图分类号:TP399 文献标识码:A
Abstract:4D trajectory prediction is a core technology of ATC automation system and traffic management system,which can improve the utilization and security of airspace.In this paper,a 4D trajectory prediction method is proposed.Combining the data of multi-data source radar,meteorology,flight plan and aircraft performance,the position of an aircraft at each time point is inferred by flight experience samples,and the precise prediction of flight trajectory and time is obtained.The practicability and effectiveness of the method are illustrated by the application effect in East China ATC Flow Management System and ATC Automation System.
Keywords:radar data fusion;trajectory prediction;ATC flow;ATC automation
1 引言(Introduction)
随着全球航空业的高速发展,空域资源紧张和交通流堵塞现象日趋明显。为能有效地实施对高密度、小间隔、大流量条件下地空域管理,精确预测飞行器轨迹与飞行时间成为解决问题地关键一环。
本文提出了一种基于雷达数据融合的航班4D轨迹预测方法。首先采集海量雷达数据,结合航班计划,通过时空统一、校正系统误差、雷达航迹跟踪和关联等方法,获取准确的航班实时位置信息为航迹预测做数据准备。其次,结合航班计划中的预计航路信息与空管飞行环境数据库中的航路、航线基础数据得出航路轨迹的2D预测。最后,根据航班性能指标和预计航路信息计算出预测轨迹的高度信息,结合样本飞行经验值得出飞行轨迹的高度和时间,最终获得较为精准的4D航迹预测数据[1,2]。
2 雷达数据处理(Radar data processing)
雷达数据处理流程如图1所示。
(1)数据预处理
数据预处理包括格式转换、飞点处理、坐标变换。
在雷达数据处理前,需将各路雷达信号接入,并将不同格式的雷達数据转换为同一格式,定义统一的数据结构,包括每批目标的二次代码、航迹号、位置、高度、速度和航迹特性等,通过飞点处理将明显错误的数据剔除。
典型的雷达数据监测项目有正北/扇区连续性、雷达目标报告必备项丢失和格式正确性检查、测试目标和模拟应答机目标的准确性检查等。
坐标变换即数据的空间校准,就是把各传感器在不同坐标系下的观测数据变换到融合中心统一的参考坐标系下。由于在雷达信号中以极坐标的方式来标示飞机的飞行位置,需要进行地图投影和坐标变换[3]。
(2)初始化航迹
利用点迹属性及空间位置对航迹进行初始化,即收到三个(可配置)以上点迹,并且上述点并未与其他航迹关联,其空间位置关系与根据其速度推算出来的位置的偏差在预设的范围内,则新起一批航迹。
(3)点迹关联
如果接收到点迹数据,利用点迹属性及空间位置进行关联形成航迹。
一次雷达:若无法获得航空器的标识信息,数据关联利用位置信息进行阈值相关。二次雷达:利用SSR代码进行配对计算,再利用空间阈值相关进一步确认。ADS-B:利用ADS-B数据中包含的24位代码进行数据关联,再利用空间阈值相关进一步确认[4]。
(4)QNH修正
为了便于管制员和飞行员掌握航空器的超障余度,避免航空器在机场附近起飞、爬升、下降和着陆过程中与障碍物相撞,航空器和障碍物在垂直方向上应使用同一测量基准,即平均海平面。因此,在机场地区应使用修正海平面气压(QNH)作为航空器的高度表拨正值。
修正海压高度的计算:
QNH altitude=Mode C level+(1013.2) 修正系统
我国民用机场高度表拨正程序和过渡高度层改革示意图如图2所示。
在下列状态时,雷达航迹显示修正海压高度:
(1)处于下降状态的雷达航迹的mode C高度小于或等于过渡高度层时。
(2)处于上升状态的雷达航迹的修正海压高度小于或等于过渡高度时。
(3)处于平飞状态的雷达航迹的修正海压高度小于或等于过渡高度时。
(5)时空对齐
根据信号源延迟、信号间隔记录、速度信息、航向信息等,对监视信息进行时间外插值计算,对齐为同一时刻下空间位置。
(6)多路融合
判断航班号,相同即为同一个目标,如果航班号不同,接着判断二次代码,如果一致,则判断位置和航向是否满足,如果满足则为同一个目标,不同则不是一个目标。
3 监视信息与计划综合相关(Surveillance information is integrated with planning)
监视信息与计划综合相关服务,从飞行计划应用预处理模块和监视信息处理服务接收分别接收飞行计划数据和监视信息,并通过标识相关、空间相关、时间相关后,进行综合研判,实现监视信息与飞行计划相关。
计划与监视信息的关联原则有如下几点:
(1)标识相关
飞行计划中标识飞机的属性项与监视数据中的相应项一致则将该监视信息与计划综合相关。
二次代码:飞行计划包含的二次代码与航迹中的二次代码一致。
航班号/批号/呼号:飞行计划中的航班号与监视信息中的二次代码一致。
传感器标识:飞行计划中的ICAO-24位编码、数据链标识等与监视信息中的对应项一致。
(2)空间相关
空间相关用于对已通过标识相关的计划与监视信息进行验证或者作为标识相关存在二义性时进行综合研判的依据之一。空间相关即监视数据中的目标运动空间属性与计划飞行路径、速度等运动特征一致。
空间距离:航迹的实时位置与计划航线的垂直距离小于30公里(可配置)。
航向:航迹的最近3点(可配置)拟合直线与当前飞行航段的夹角小于30度(可配置)。
飞行速度:处于巡航阶段的航迹,高度大于5000米(可配置),其速度与飞行计划的巡航速度的差值小于100千米/小时(可配置)。
高度:处于巡航高度的航迹,高度大于3000米(可配置),其高度与飞行计划的巡航高度的差值小于3千米(可配置)。
(3)时间相关
时间相关也是对已关联计划存在二义性时进行综合研判的依据之一。
时差因子:当前时刻与航迹当前点计划预达时刻的差值小于20分钟(可配置)。
综合研判对接收到的计划、航迹进行遍历,调用标识相关原则、空间相关原则、时间相关原则,综合考虑计划与计划、航迹与航迹、计划与航迹之间的关系,生成计划与航迹之间的关联关系。综合研判的步骤如下:
利用计划与航迹的属性(二次代码、传感器标识、航班號/批号)等建立初步的关联关系。
一个计划对应一个航迹。利用空间距离原则对关联关系进行验证,若不符则去掉关联关系。
一个计划对应多个航迹、一个航迹对应多个计划。利用空间距离、航向、速度、高度进行研判。选择通过每项验证的航迹与该计划关联;若未全部通过验证,则按照“空间距离>航向>速度>高度”的原则进行优先选择。若全未通过验证,则取消关联关系。
人工多义性处理。对于一个航迹对应多个计划的情况,采用醒目的颜色将关联度最高的飞行计划为监视信息挂上临时标牌,等待管制员的人工确认。对于一个计划对应多个航迹的情况,采用醒目的颜色将两个航迹均挂上临时标牌,等待管制员人工确认。
已相关的军航综合航迹。对于接收到的已相关的综合航迹可保留其相关信息或者重新相关。系统提供配置项在两者之间切换。
带航班号的民航航迹。对于接收到的带航班号的航迹,以航班号为最高优先级判据,结合时间属性对其进行相关。
去相关即删除某批次航迹与飞行计划的关联关系。某批次航迹的实时属性、空间、时间与飞行计划的关系不满足相关原则时,自动去相关,并更新数据。
4 飞行数据处理及4D航迹预测(Flight data processing and 4D trajectory prediction)
根据FPL报文编组15的航路信息、当前位置信息、实际飞行高度和许可飞行高度信息计算飞行计划轨迹。
在进行飞行计划轨迹计算时,利用真空速和高空风数据,计算经过的所有航路点的预计飞越时间。
根据飞行计划和气象GRIB信息,进行飞行计划四维计算和预测(位置、高度、时间),形成飞行航迹。
4.1 航迹估计功能计算
(1)预计结束时间和高度;
(2)爬升的顶点和下降的顶点;
(3)预计到达时间。
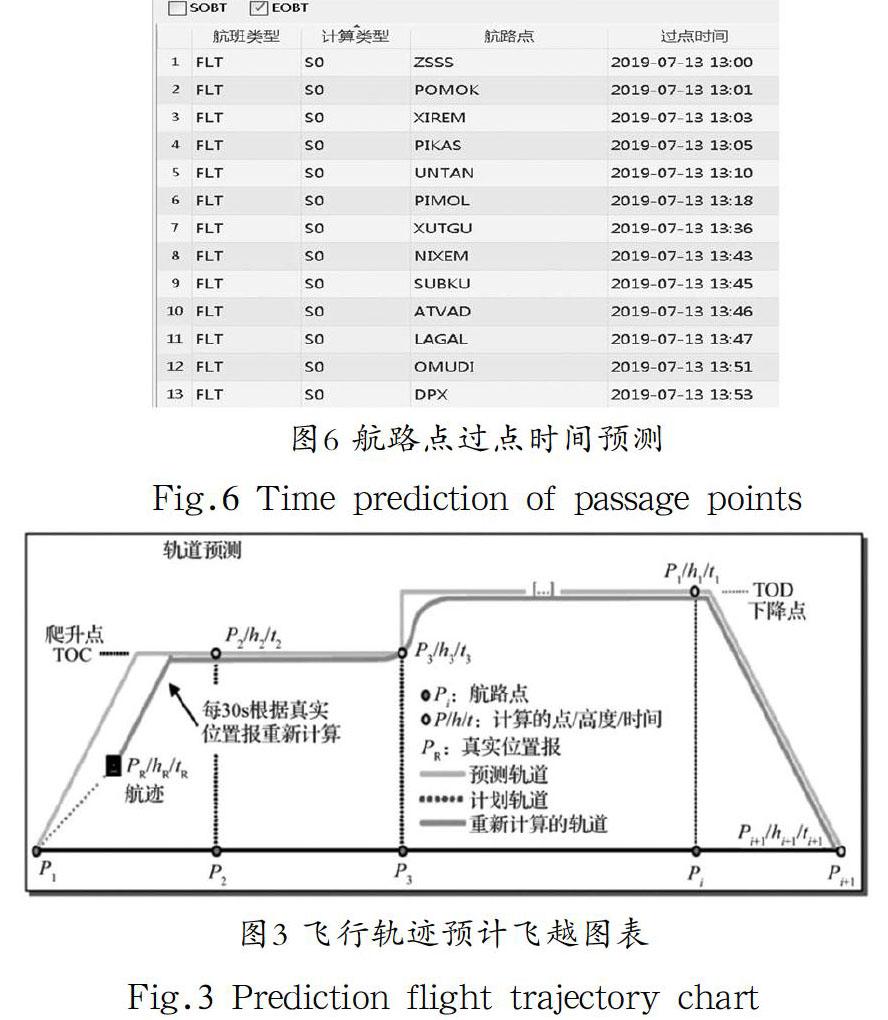
爬升的顶点和下降的顶点需要根据BADA飞机性能特征、风和空气温度数据进行计算。但是,航迹估计功能在计算航线中飞行高度变化程序时会忽视BADA飞机性能。爬升的顶点在爬升和巡航阶段之间的转折点标记,下降的顶点在巡航和下降阶段之间的转折点标记,见图3。
航迹估计考虑相关标准仪表离场程序(SID)、标准进场程序(STAR)和在用跑道,如果已知,在起飞和到达机场估计飞行航迹。
4.2 4D航迹计算过程
航迹计算的基础是样本搜索,下一个样本的计算考虑由战略的高度限制与先前输入的战术约束和先前的航迹样本状态计算出的航线2D路径(例如高度、速度矢量、2D位置等)。
航迹计算的详细步骤如下:①航段;②段子区间;③航迹样本计算;④飞行阶段;⑤扇区的划定。
(1)航段:航段由计算的航路点组成,以连续对[,]的形式来处理,是入境或过境的航班或者起飞机场计算出的航线上的第一个点,是出境或过境的航班或者目的机场计算出的航线上的最后一个点。若或是机场,如果使用的跑道已知,跑道的位置将用于航迹计算。SID和STAR过程考虑只要从它们的航线扩展的导航点属于计算的航线作为任何其他ATS航线的航迹估计。
(2)航段的子区间:每个航段都看作由点[,]组成的一些子区间,航段内子区间的长度是固定的。它是一个设定的参数(最大为4mile)。每个子区间组成了一个计算样本。和航段一样,子区间同样以连续对的形式处理,所以根据先前的范例对样本进行计算。
(3)航迹样本计算:以第一个航迹样本作为初始条件,以高度、时间和坐标作为成功样本计算出来。遍历所有样本,能够获得每个样本的4D估计。只要计算出航段所有样本的4D估计,采用先前一个航段的最后一个样本估计值作为初始条件,下一个航段就能以相同的方式处理。计算航迹样本的交互过程如图4所示。
计算的初始条件是:2D位置、起飞机场(起飞航班)或起飞跑道(如果可用)、进入前的最后一个外部点(进港航班)、最后的航线位置、飞机经过的最后一个飞行计划航路点高度是相应的2D位置的高度。
当航迹与飞行计划相关时,当前的航迹位置、高度、水平速度数据和爬升/下降率作为初始条件用于计算下一个航迹采样状态。只要它们属于相同的BADA高度层,同样的水平速度数据和爬升/下降率用于随后的航迹样本。当改变高度层或者飞行计划与航迹没有相关时,航迹采用BADA参数对应的高度层、飞行阶段和飞机型号进行计算[5,6]。
(4)飞行阶段:航迹估计功能确定飞行计划在起飞(爬升)、巡航或到达(下降)各个子区间的飞行阶段。航迹估计功能确定航迹的最大爬升率和最大下降率(例如,没有爬升的顶点或TO下降的顶点的飞机确定为平稳飞越航班)。爬升的顶点标志爬升和巡航阶段之间的过渡点,下降的顶点标志巡航和下降阶段的过渡点。
5 预测方法的实际应用(Practical application of the prediction method)
5.1 空管自动化系统中的冲突检测
如图5所示,冲突检测的方法是在固定时间点划定一个危险区域MSAW,经过4D航迹计算的航班预计航迹若在这个时间点上经过该区域则表示该航班与其他航空器存在飞行冲突情况,需要及时告警,通知航空管制员立即干预[7,8]。
华东空管中心的空管自动化系统自带的冲突检测功能,提前15秒鐘冲入告警。而使用了文中航迹预测方法冲突检测模块能够提前30秒钟检测到冲突情况。这多出的15秒钟,使管制人员能够有更加充分的时间实施更格式的冲突解脱方案,极大程度的提高航空安全。
5.2 流量管理中的应用
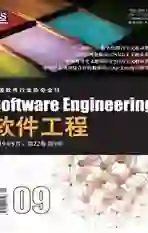
空管流量管理是否精确有效的关键环节是对每架航班所有预计航路点的预计过点时间的精确推测。如图6所示,以上海虹桥至北京的CES5111航班为例,应用文中方法的华东空管流量管理系统能够在收到航班FPL领航计划报文,立即预测航班的所有过点时间。经常长期运行证明,在航班起飞前90分钟内,系统对航路点过点时间的预测误差在30秒内,总航线的时间预测误差在3分钟内。这一指标,明显高出流量管理系统国标中对于航路预测的指标要求。
6 结论(Conclusion)
本文提出的这种基于多雷达数据融合的航班4D航迹预测方法,通过对大量雷达数据的清洗、融合,获得航班精确的实时位置及航班飞行经验库。利用航迹片段采样算法,能够在航班预计起飞前一段时间内,准确预测航班的4D航迹,为其他的空管信息系统提供有效的航班飞行数据,从而提升空管信息系统的数据准确性和业务功能有效性。
参考文献(References)
[1] 李广文,贾秋玲,齐林,等.基于4D航迹的飞机连续下降运行飞行引导技术[J].中国科学:技术科学,2018(03):312-325.
[2] 高阳.短时和长时混合4D航迹预测算法研究[D].中国民航大学,2016:1-10.
[3] 顾俊伟.基于多元数据融合的4D航迹规划技术研究[D].南京航空航天大学,2016:25-29.
[4] 杨东岭.基于ADS-B的4D航迹预测及应用[D].中国民航大学,2017:22-29.
[5] 杜实,任景瑞,郭嘉.航空器4D航迹目标跟踪精度设计研究[J].计算机仿真,2019(5):38-40.
[6] 熊冰妍,王国胤,邓维斌.基于样本权重的不平衡数据欠抽样方[J].计算机研究与发展,2016,53(11):2613-2622.
[7] 王建超,王超,张宝超.基于点融合进近的航空器进场4D航迹规划[J].科学技术与工程,2017(5):333-337.
[8] 高梦宇,胡明华,张颖,等.羊钊结合高度层分配的4D航迹战略冲突解脱[J].航空计算技术,2017(9):41-44.
作者简介:
韩剑峰(1980-),男,硕士,软件工程师.研究领域:空管信息系统设计,软件开发.