消防辅助救援机器人群设计研究
2019-10-08陈伟哲黄梦醒吴迪肖瑾丁一寅张晨宇
陈伟哲 黄梦醒 吴迪 肖瑾 丁一寅 张晨宇

摘 要:高科技机器人已开始代替人类在一些特殊场合的工作,“机器换人”已然成为现有科技发展的主流趋势。本文针对消防辅助救援机器人群开展研究。在分析消防辅助救援机器人应用现状的基础上,设计了由一台领航机器人和两台跟随机器人组成的消防辅助救援机器人群,并分别讨论了每台机器人的工作原理和实现方法,最后给出了可实现的功能和下一步的研究工作,为消防机器人完成团队化工作提供了一个新的方向。
关键词:消防;辅助救援机器人群;领航机器人;工程机器人;信息检测机器人
中图分类号:TP242.6 文献标识码:A
Abstract:High-tech robots have begun to take the place of human beings in some special occasions,and Machine Replacement has become the mainstream trend of the current development of science and technology.In this paper,fire rescue robots are studied.Based on the analysis of the application status of fire rescue robots,a group of fire rescue robots consisting of a pilot robot and two random robots are designed.The working principle and implementation method of each robot are discussed separately.Finally,the realizable functions and the following research work are given to the fire rescue robots,providing a new direction to accomplish team work.
Keywords:fire-fighting;assistant rescue robot group;pilot robot;engineering robot;information detection robot
1 引言(Introduction)
據应急管理部消防救援局的统计,2018年全国共接报火灾23.7万起,死亡1407人,伤798人,消防队每天平均出队救火就达到650次,任务繁重且危险性高。因火灾现场各种不确定性因素可能导致消防人员做出错误决断,当我们听到消防员因为救人而不幸牺牲的时候,无不为他们感到心痛。因此消防辅助型机器人[1]的设计与应用[2]显得尤为重要,而一个完整的救援系统需要拥有自主巡航和手动操控两种控制模式,具有自主建图导航[3,4]、危险物品自动抓取[5]、周围环境实时图传、环境监测等功能。本文提出了消防辅助救援机器人群的设计研究方案。
2 消防辅助救援机器人的应用现状(Application status of the fire-fighting assistant rescue robot)
相比于国内救援辅助消防机器人仍处于起步阶段的情况,国外救援辅助机器人已经慢慢走向成熟化。例如日本科学家们已经研发出了可以在复杂地形运动的小型机器人,可以在地震灾后在废墟中寻找生命。希腊科学家则针对情况复杂的水上救援设计出了海上救援机器人。国外救援机器人已经开始在各个领域发挥重要作用。而国内现状主要是受两个方面因素[6]影响,第一是因为国内当前的特种救援机器人主要是服务于政府和军队,它们的主要技能都是为危险性特大的灾难而设计的;另一方面是由于消防机器人仍处于试用实验阶段,国家在消防机器人上的资金投入上存在不足,还不能投入到大规模的生产中,使得大部分地区无法使用。
消防辅助救援机器人在灭火救援[7]中具有广阔发展空间:一是消防机器人的辅助系统可以在火灾现场情况不明时,利用自身的传感器进行辅助,对周围的复杂地形进行扫描构图,能够辅助消防员进入火场,并利用其自带的红外成像系统,让消防员能够在最短时间内找到被困人员。二是在消防救援活动中,在面对消防人员无法工作的高温危险区域,可以进行近距离的灭火作战,这极大程度上提高了其在灭火救援中的战斗力。三是随着我国经济社会的发展,社会生产生活活动越来越特殊化,消防火灾出现的原因越发复杂,影响范围广。经常会出现消防火灾事故,在许多情况下事故对于消防人员的生命危险较大,而消防辅助机器人则能在保障消防人员的安全下,以最快速度营救被困人员,并控制现场火灾。
3 消防辅助救援机器人群的设计原理(Design principle of the fire-fighting assistant rescue robot group)
消防辅助救援机器人群是由一台领航机器人和两台跟随机器人组成的多智能体编队,如图1所示,整个系统有自主巡航和手动操控两种控制模式,具有自主建图导航、危险物品自动抓取、周围环境实时图传、环境监测等功能。
3.1 领航机器人
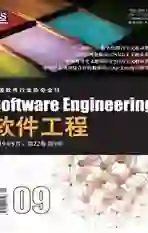
领航机器人外形图和内部结构图分别如图2和图3所示。领航机器人搭载激光雷达对周围环境进行扫描、建模,并规划出机器人群经过的优化路径。双电机驱动机器人沿着路径行驶,通过对电机的通断电和机器人内部的差速装置实现机器人的启停和转弯。用户可设置地图中的起点和终点,领航机器人会带领编队达到所指定的目的地。控制方式有两种,一种通过ROS环境电脑与树莓派进行局域网互联,一种是手机app与树莓派进行连接,控制机器人进行雷达的扫描建图及导航。除此外,还加入了USB摄像头模块,供远距离操控时的实时图传。
领航机器人的核心开发版采用树莓派3b+,配置环境为Linux系统ROS环境,底层驱动板为stm32F1开发板。用户可以通过ROS电脑与树莓派进行局域网互通,发送指令打开激光雷达,将激光雷达返回的点云数据进行tf树坐标系转换后,采用gmapping算法最终在PC端建立一个平面二维地图供操控者查看。建立好二维平面图进行保存后,可设置地图中的起点和终点,通过路径规划算法进行规划行驶路径,并且无须人员操作实时更新路径自行前往目的地,领航机器人的硬件连接如图4所示。
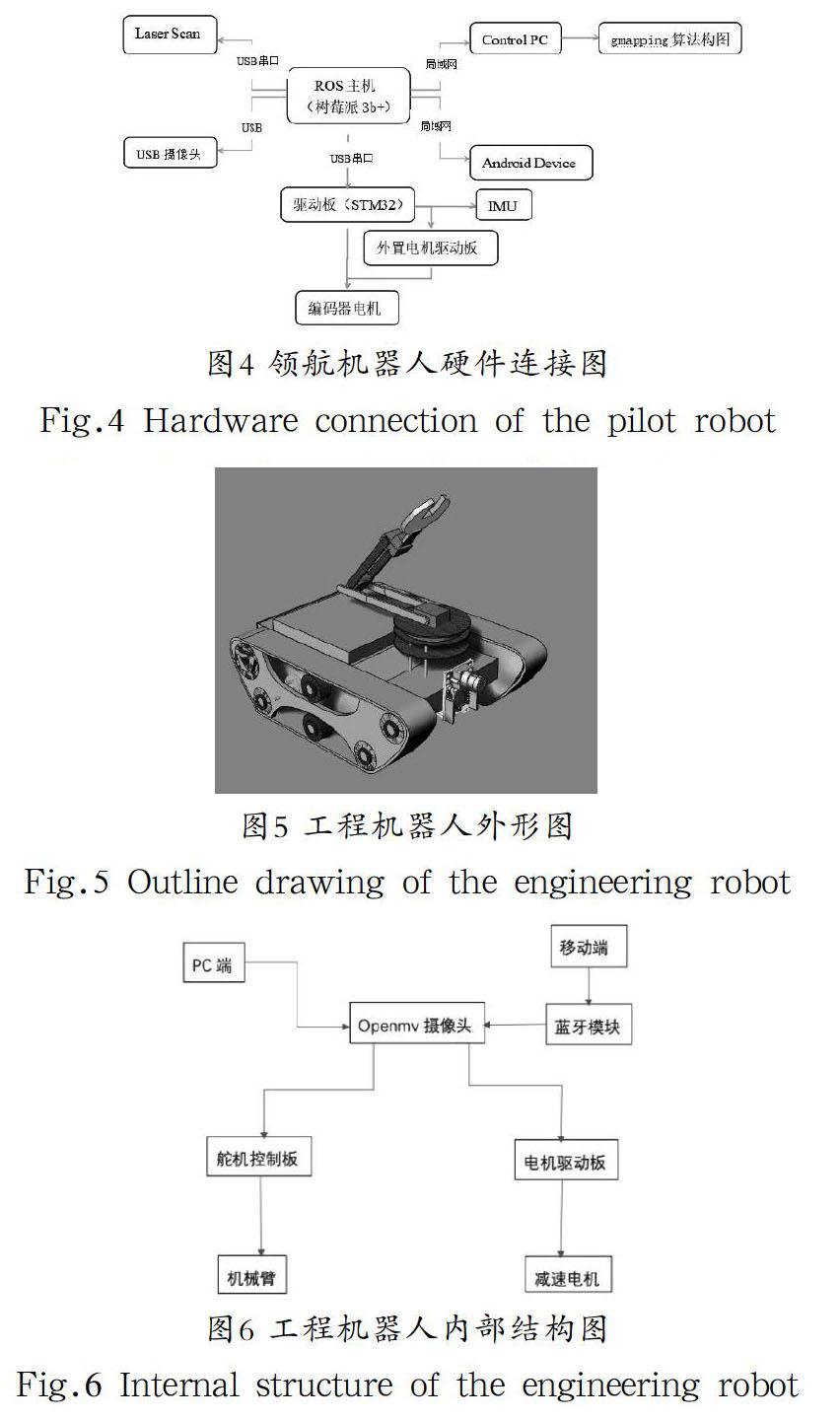
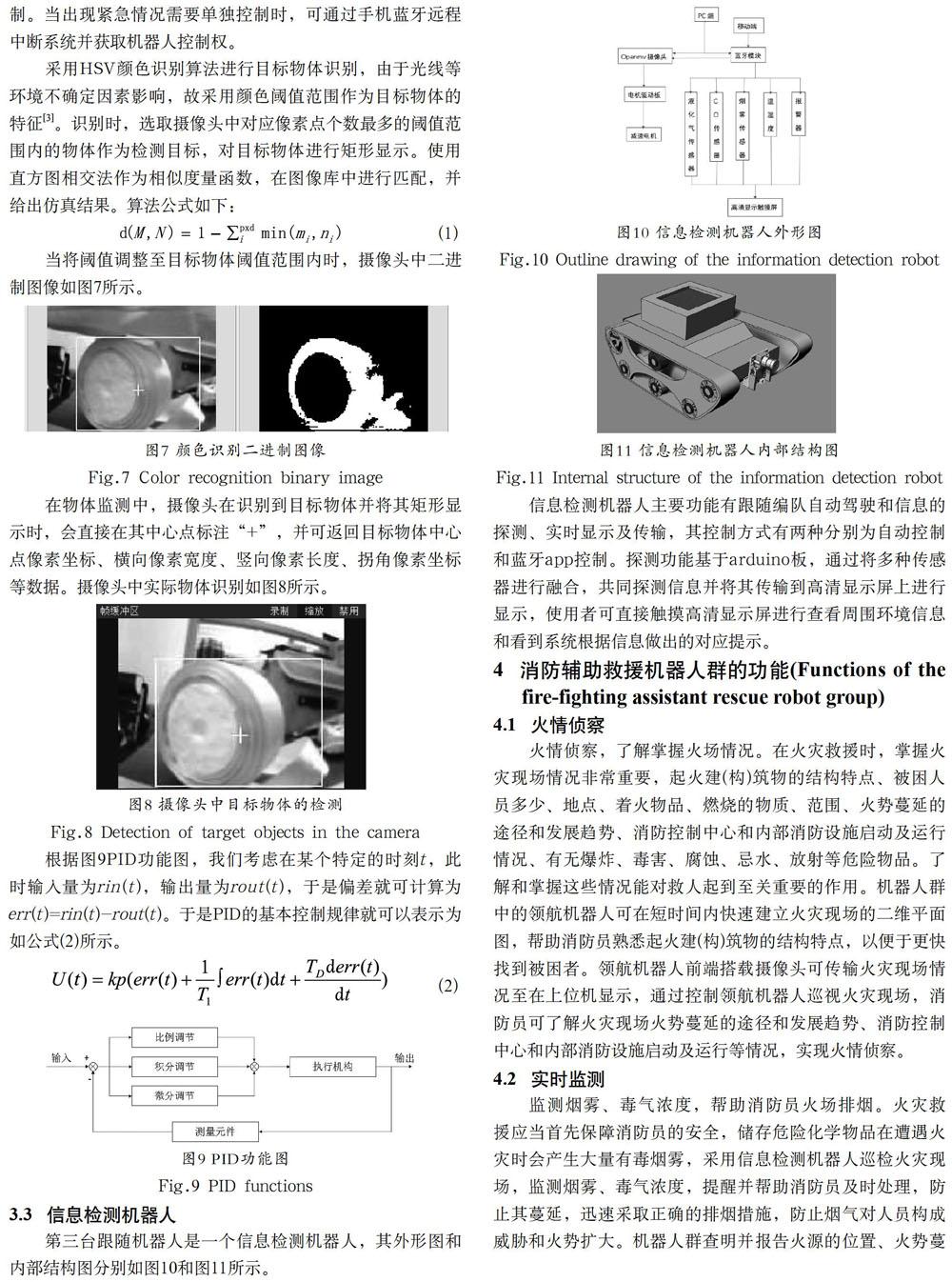
3.2 工程机器人
第二台跟随机器人是一个工程机器人,其外形图和内部结构图分别如图4和图5所示。工程机器人的主要作用是主动识别自动抓取危险物品和跟随第一台领航机器人,其控制方式有两种分别为自动控制和蓝牙app控制。机器视觉基于openmv平台,可主动识别事先设定好的危险物品,通过机械臂逆运动学几何解法解算出各机器手关节舵机所需的转角,并将其输出至舵机控制板进行控制机械臂自主抓取。
跟随领航机器人自动控制实现途径为颜色识别算法。通过在领航机器人的末尾添加一条特殊彩带,并采用颜色识别算法找出领航机器人尾部中心点,将此摄像头与领航机器人之间的角度偏差值和距离插值输入到底层的pid控制输入端,经过公式转换成左右轮的速度值进行工程机器人的自动控制。当出现紧急情况需要单独控制时,可通过手机蓝牙远程中断系统并获取机器人控制权。
在物体监测中,摄像头在识别到目标物体并将其矩形显示时,会直接在其中心点标注“+”,并可返回目標物体中心点像素坐标、横向像素宽度、竖向像素长度、拐角像素坐标等数据。摄像头中实际物体识别如图8所示。
信息检测机器人主要功能有跟随编队自动驾驶和信息的探测、实时显示及传输,其控制方式有两种分别为自动控制和蓝牙app控制。探测功能基于arduino板,通过将多种传感器进行融合,共同探测信息并将其传输到高清显示屏上进行显示,使用者可直接触摸高清显示屏进行查看周围环境信息和看到系统根据信息做出的对应提示。
4 消防辅助救援机器人群的功能(Functions of the fire-fighting assistant rescue robot group)
4.1 火情侦察
火情侦察,了解掌握火场情况。在火灾救援时,掌握火灾现场情况非常重要,起火建(构)筑物的结构特点、被困人员多少、地点、着火物品、燃烧的物质、范围、火势蔓延的途径和发展趋势、消防控制中心和内部消防设施启动及运行情况、有无爆炸、毒害、腐蚀、忌水、放射等危险物品。了解和掌握这些情况能对救人起到至关重要的作用。机器人群中的领航机器人可在短时间内快速建立火灾现场的二维平面图,帮助消防员熟悉起火建(构)筑物的结构特点,以便于更快找到被困者。领航机器人前端搭载摄像头可传输火灾现场情况至在上位机显示,通过控制领航机器人巡视火灾现场,消防员可了解火灾现场火势蔓延的途径和发展趋势、消防控制中心和内部消防设施启动及运行等情况,实现火情侦察。
4.2 实时监测
监测烟雾、毒气浓度,帮助消防员火场排烟。火灾救援应当首先保障消防员的安全,储存危险化学物品在遭遇火灾时会产生大量有毒烟雾,采用信息检测机器人巡检火灾现场,监测烟雾、毒气浓度,提醒并帮助消防员及时处理,防止其蔓延,迅速采取正确的排烟措施,防止烟气对人员构成威胁和火势扩大。机器人群查明并报告火源的位置、火势蔓
延的方向、烟雾扩散的范围后,工程机器人用机械臂夹取小型灭火球帮助消防员扑灭火源,消防员则利用破拆、喷雾水流、移动排烟设备等方法进行人工排烟。
4.3 清理工作
火灾扑灭后的清理工作,防止二次爆炸或燃烧。火灾扑灭后利用消防救援机器人群全面、细致地检查火场,彻底消灭余火;对石油化工生产装置、储存设备的温度及其周围可燃气体、易燃可燃液体蒸汽的浓度进行检测,并进行相应的处理,防止复燃。
5 结论(Conclusion)
消防辅助救援机器人群是由一台领航机器人和两台跟随机器人组成的多智能体编队。本产品的主要功能有火灾紧急辅助救援、动态监视、灾情探测、异常报警、危险品抓取、紧急物资递送等,可提高救援效率、保障消防员安全,为紧急情况救援、环境探测、灾后巡检等任务提供解决方案。这个设计未来有三个主要发展方向:一是将三辆车进行放大化,往人形机器人方向发展;二是提高系统语音识别的智能程度,向智能交互发展;三是利用基站定位或者雷达定位对阵型的变换进行加强。最终目的是希望它能升级应用到更大型的工业活动中去。
参考文献(References)
[1] Ando H,Ambe Y,Ishii A,et al.Aerial Hose Type Robot by Water Jet for Fire Fighting[J].IEEE Robotics & Automation Letters,2018,3(2):1128-1135.
[2] Shamsudin A U,Ohno K,Hamada R,et al.Consistent map building in petrochemical complexes for firefighter robots using SLAM based on GPS and LIDAR[J].Robomech Journal,2018,5(1):7.
[3] Lu Y,Zhang L,Weijer J V D,et al.Beyond Eleven Color Names for Image Understanding[J].Machine Vision & Applications, 2018,29(2):361-373.
[4] 陶霖密,徐光祐.机器视觉中的颜色问题及应用[J].科学通报,2001,46(3):178-190.
[5] 郭豪,李宝慧,赵树忠.基于模糊PID控制的步进电机建模与仿真[J].机械工程与自动化,2018,48(2):167-168.
[6] 陈建斌.消防机器人在我国灭火救援中的应用现状和前景分析[J].地球,2017(10):98.
[7] 郑鹏.基于消防机器人的救援辅助系统的研究[J].山东工业技术,2014(10):57-58.
作者简介:
陈伟哲(1998-),男,本科生.研究领域:智能机器人.
黄梦醒(1973-),男,博士,教授.研究领域:人工智能大数据海洋通信.本文通讯作者.
吴 迪(1991-),男,硕士.研究领域:人工智能大数据海洋通信.
肖 瑾(1998-),女,本科生.研究领域:智能机器人.
丁一寅(1998-),男,本科生.研究领域:智能机器人.
张晨宇(1998-),男,本科生.研究领域:智能机器人.