基于Jack仿真的汽车A柱障碍角的校核与评估
2019-09-17王长帅姬小国史雪莹朱彤
王长帅,姬小国,史雪莹,朱彤
(长安大学 汽车学院,陕西 西安 710064)
1 引言
截止2017年年底,全国汽车保有量21743万辆,比上年末增长11.8%[1],但道路交通资源是有限的,汽车数量的增加导致道路变得更加拥挤,交通事故频发。2017年我国发生交通事故共计203049起,导致63772人死亡,209654人受伤[2]。对交通事故的致因进行分析,发现人、车、路及环境是导致交通事故的主要原因,其中人的因素是导致交通事故的最主要原因[3-12],但汽车设计的缺陷也会引起交通事故的发生。驾驶过程中80%左右的道路交通信息是驾驶人通过眼睛获得的[12-20],因此良好的驾驶视野是汽车行驶安全的保证。受制于车辆本身结构强度的要求,汽车A柱在设计过程中不能被代替,A柱的宽度和角度会影响驾驶人的视野,转弯时驾驶人的视野会被A柱部分遮挡,即为A柱障碍角,A柱障碍角会影响驾驶人对车辆侧前方物体的判断[21]。A柱障碍角的大小直接关系到驾驶人的视野范围,因此有必要对汽车A柱障碍角进行校核与评估。
汽车A柱设计在汽车安全中占有着非常重要的地位。Reed M (2008年)利用贝塞尔曲线建立仿真车辆转向轨迹建模并对56辆汽车A柱的几何形状进行了分析,结果表明A柱越靠近前方视线,其在汽车行驶路径上产生的遮蔽区域越大,处在遮蔽区的行人面临这不被司机发现的风险[22]。S.Y.Ahn等人(2015年)依据信息的易感性,从驾驶员的视野角度对车辆前方视野区域进行了重新定义,并提出了基于驾驶员注视比例的评估前方视野区域的工具,并招募驾驶员进行模拟试验,结果表明前方视野评估工具和人的主观感性评估具有高度的相关性和可靠性,评估驾驶员前方视野的方法可用于车辆设计[23]。Cho,Y.H.,& Han,B.K.(2010年)认为减少车辆可能造成的潜在伤害是对行车安全非常必要,减小A柱障碍角可以给驾驶人提供一个宽阔的视野,并对比分析了三种减少A柱障碍角的方法,认为.采用细长的A柱是减少A柱障碍角并确保驾驶人视野的最佳方案[24]。基于驾驶员眼点和头部转动点,郑巍利用投影原理介绍了一种新的A柱视野障碍评价方法,综合考虑A柱及外后视镜、车门封条等因素对驾驶人视野的影响,认为该方法可对车辆A柱视野障碍进行定性分析,也可定量地对不同车辆的情况进行比较[25]。通过对原有拖拉机驾驶室的设计,苏小伟利用SAE法和简化法,提出了针对拖拉机A柱视野校核的方法[26]。陈焙媛等人从交通事故数据入手,对由车辆A柱盲点所造成的事故进行研究,分析导致事故的主要参数,建立人因工程模型、设计调查问卷,并对结果进行分析,认为通过Volvo可视化设计、辅以光学设施可以克服A柱死角障碍[27]。
通过文献的综述可以发现国内外对汽车A柱双目障碍角的校核研究较少,对车辆的设计缺乏相应的理论指导。针对国内某一固定车型,依据车辆的具体设计尺寸参数,利用Jack仿真软件建立仿真车辆模型,并对该型车的A柱双目障碍角进行校核。本文利用人因工程仿真的方法,依据《汽车驾驶员前方视野要求及测量方法》的要求,通过Jack软件中的车辆分析工具及时域分析工具对国内某型车A柱障碍角进行测量与校核,并对该车型前方视野进行分析评价。
2 驾驶人视觉特性及车辆A柱障碍角
2.1 驾驶人的视野范围
在驾驶过程中驾驶人通转动头部和眼睛来扩大自身的视野范围,据人机工程学原理,驾驶室中驾驶员的头部转动围绕着一个转动中心,位置位于双眼连线的中垂线后方98 mm处,左右两眼距离为65 mm[28]。其中人眼睛和头部转动的角度范围如表1所示。

表1 人眼睛和头部的转动范围
2.2 眼椭圆相关概念
2.2.1 眼椭圆
眼椭圆是描述不同身材驾驶员眼睛在空间上相对车辆内部参考点位置的一种统计表示法。美国福特汽车公司做了大量的统计实验研究驾驶人眼睛的分布规律,研究表明在车身坐标系中眼睛分布范围在俯视图和侧视图的投影均近似为椭圆,故称为眼椭圆[29],眼椭圆视图如图1(a)所示。眼椭圆表征的是驾驶员在车辆中眼睛位置的统计分布,因此在汽车的视野设计中可以通过眼椭圆来对驾驶人的视野进行定量的评价[30]。《汽车驾驶员眼范围》标准指出依据眼点的分布,眼椭圆被分90%、95%、99%等百分位,眼椭圆的百分位由视切比来定义,包含眼椭圆的切线的一面区域的眼点数量与区域内眼点总数的比值为视切比,如图1(b)所示,95%的驾驶员眼睛落在切线下方,故该椭圆为95%眼椭圆。
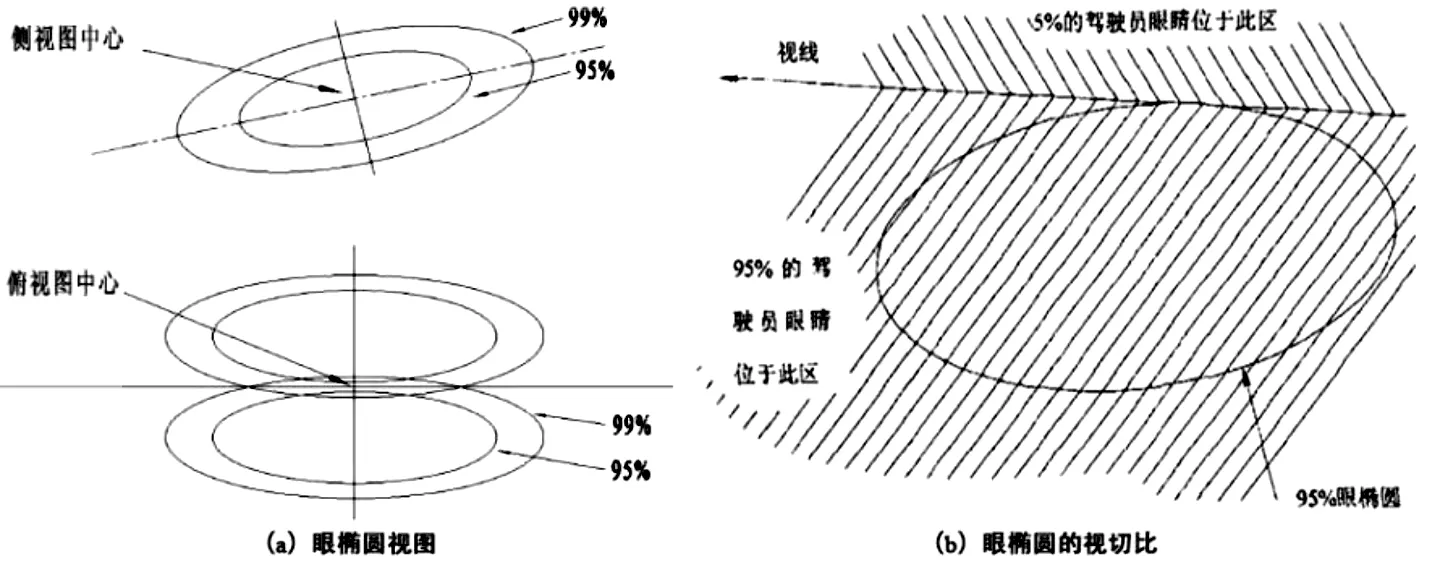
图1 眼椭圆的视图及其视切比
2.2.2 眼椭球
眼椭球是指车身坐标系里驾驶人眼睛位置的真实分布状况,将眼椭球在车身空间坐标系的各个方向展开,其交集就形成了眼椭球[31]。本研究中眼椭球的定位可通过Jack软件仿真直接完成。Jack中仿真的眼椭球模型如图2(a)所示。
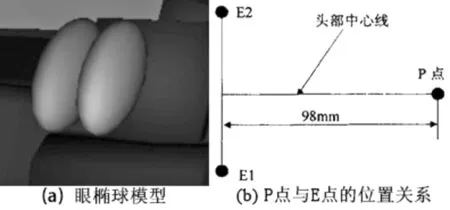
图2 眼椭球模型及P点与E点的位置关系
2.2.3 眼点
SAE标准中,驾驶员的眼点(E点)是表征驾驶员双目位置的点,是在95%的驾驶员眼椭圆上得到的,两眼点之间的距离为65 mm[31]。在对驾驶室进行人因工程分析时,常将眼点与头部转动中心点(P点)结合起来进行研究,P点与E点的相对位置关系如图2(b)所示,其中两眼点连线的中垂线段称为头部中心线,P点位于头部中心线上且距眼点连线98 mm。图2(b)为俯视图,眼点和P点具有相同的Z坐标。
2.3 A柱盲区
A柱是连接驾驶车顶与车辆前舱的支柱,如图3所示。A柱起着支承车身结构的作用,但由于A柱处在驾驶室的前方,易遮挡驾驶人的视野,驾驶员在驾驶室中由于A柱的遮挡而看不到的地方被称为A柱盲区[32]。A柱盲区范围的大小与A柱的尺寸参数和驾驶人的视点与A柱的距离等因素有较大的关系。在保证A柱的结构刚度强度能够满足汽车整体结构性能的前提下,尽可能使汽车A柱变细更有利于减小汽车A柱盲区,A柱产生的盲区越小,越有利于驾驶安全。《汽车驾驶员前方视野要求及测量方法》中规定车辆的A柱的数量不得超过两根,且其双目障碍角不得大于6°。

图3 车辆A柱
2.4 A柱障碍角的测量方法
2.4.1 国标中A柱障碍角的测量方法
《汽车驾驶员前方视野要求及测量方法》将A柱障碍角划分为驾驶员侧双目障碍角和乘员侧双目障碍角,驾驶员侧A柱双目障碍角定义为:E1和E2的连线绕P1 旋转,使E1至左A柱的S2截面外侧的切线与E1、E2的连线成直角,从E1向左A柱的S2截面外侧作切线和从E2向左A柱S1截面内侧作切线,从E2点作前一切线平行线,与后一切线所成的平面视野角度即为驾驶员侧A柱双目障碍角,测量方法如图4所示。
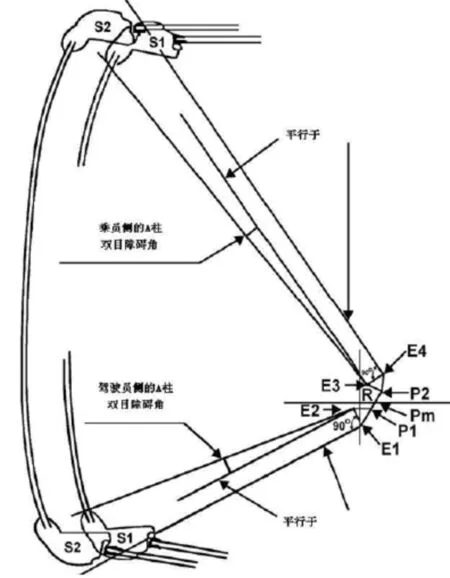
图4 国标中A柱障碍角测量方法
2.4.2 眼椭圆法
SAE中给出测A柱障碍角的方法是眼椭圆法,如图5所示。图中S截面过P点作水平面与A柱相交。E1和E2的连接线绕P1旋转,使E1至左A柱的S截面外侧的切线与E1、E2连线成直角,从E1向左A柱的S截面外侧作切线和从E2向左A柱 S截面内侧作切线,从E2点作前一切线平行线,与后一切线所成的平面视野角度即为驾驶员侧A柱双目障碍角[32]。
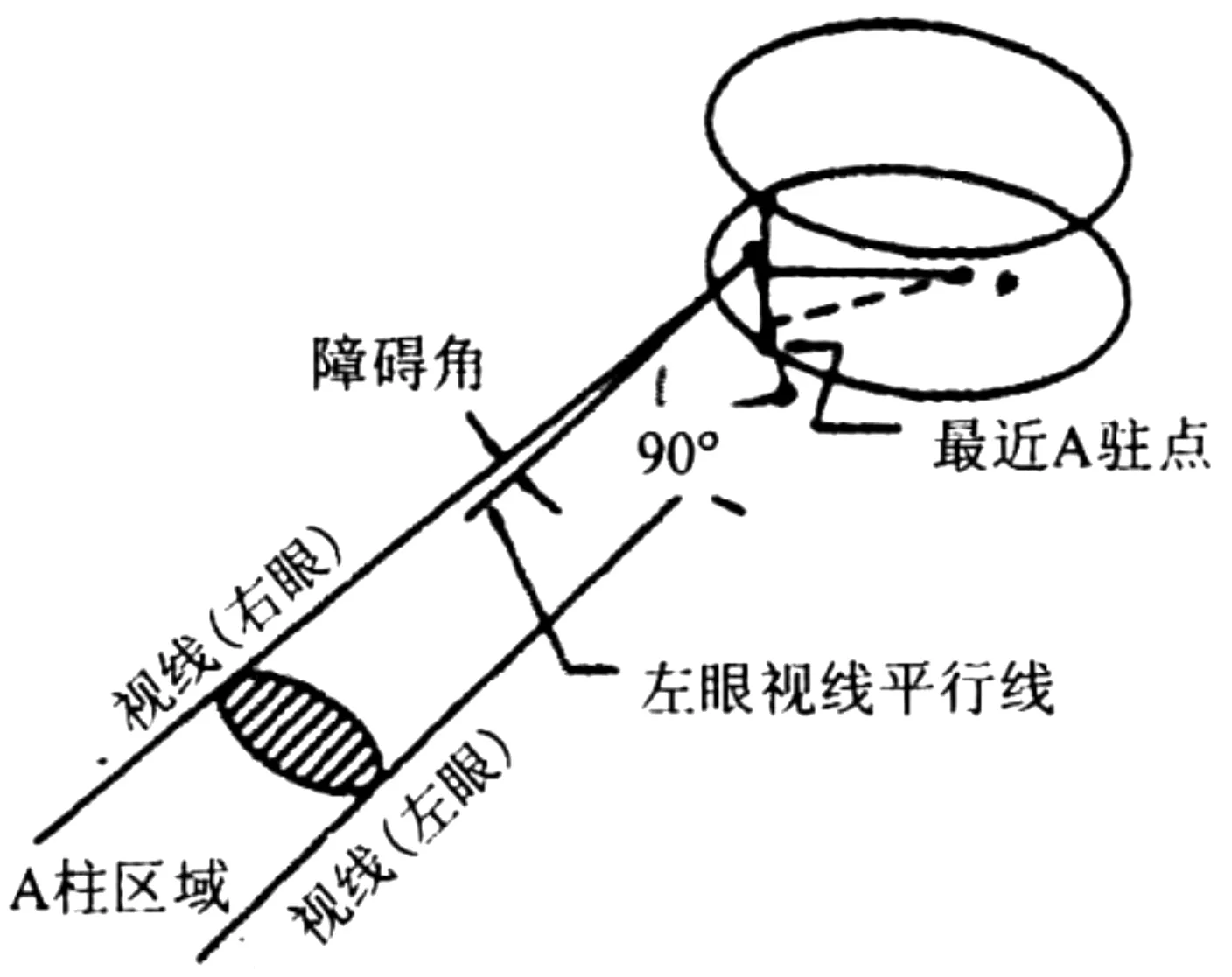
图5 眼椭圆法
2.4.3 简化的A柱障碍角测量方法
通过综合分析上述两种A柱障碍角测量方法,测量方法进行简化,得出一种更适合Jack软件的A柱障碍角测量方法。即驾驶员头部转动到左极限位置时,从驾驶员的左眼引出视线,使之与驾驶室左A柱外侧相切;从驾驶员的右眼引出一条视线,使之与左A柱的内侧相切,这两条视线的夹角即为驾驶员左侧A柱双目障碍角。而驾驶员头部转动到右极限位置时,从驾驶员的左眼引出视线,使之与驾驶室右A柱内侧相切;从驾驶员的右眼引出一条视线,使之与右A柱的外侧相切,这两条视线的夹角即为驾驶员的右侧A柱双目障碍角[33]。
3 基于Jack人车仿真模型
通过对新产品三维模型的导入及仿真分析,Jack可以分析该产品是否符合用户需求及人因规律,通过将视图参考点定位到指定的对象上(如人的眼睛)可实现仿真环境中数字人视野的分析[34]。
3.1 建立数字人体模型
本研究所使用的车辆模型从Jack实体数据库中导入,相关参数依据国内某型车的实际参数确定,如图6(a)所示。Jack数据库中定义了各个身体尺寸和性别的三维人体模型,并且用户可以对三维人体模型进行尺寸缩放,本研究所建立的人体模型为95%的中国人体尺寸,符合中国人体特征,如图6(b)所示。
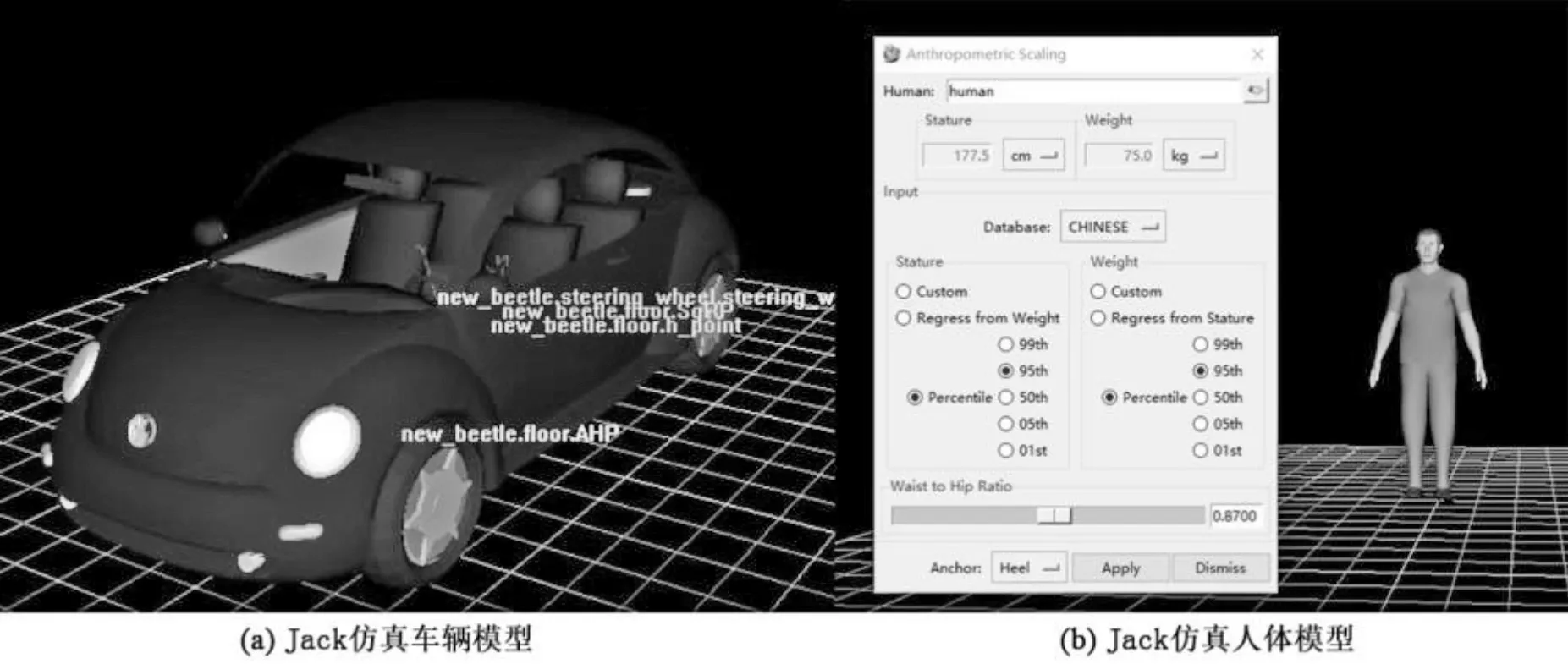
图6 Jack仿真车辆模型和人体模型
3.2 数字人模型导入
利用Jack软件自带的工具,可将所建立的数字人放置到车辆驾驶室座椅上并使数字人摆出开车的姿势,同时可以对数字人在车辆里的姿势进行,使其手、脚完美地契合方向盘与脚踏板,身体完美贴合车辆座椅。数字人导入车辆驾驶室座椅及其姿势的调整过程如图7所示。

图7 数字人导入座位及姿势调整
4 汽车A柱双目障碍角的校核
对驾驶员左/右侧A柱的双目障碍角进行测量时,必须将数字人的头部转动到左/右侧极限位置,但Jack软件无法单独生成左眼或者右眼各自的视线,故利用ruler测量尺代替视线,但其不会影响对A柱双目障碍角对测量精确度。测量过程利用Jack软件模具库中的plan平面,可借助该平面从驾驶人眼睛引出水平视线,以确定与左右眼视线相切的A柱内外侧。
4.1 左侧A柱视野校核
车辆驾驶室左侧A柱的双目障碍角测量方法为:驾驶员头部转动到左极限位置时,从驾驶员的左眼引出视线,使之与驾驶室左A柱外侧相切,从驾驶员的右眼引出一条视线,使之与左A柱的内侧相切,这两条视线的夹角即为驾驶员的左侧A柱双目障碍角[34]。
对驾驶人左侧的A柱双目障碍角的校核流程如下:
(1)转动驾驶人头部至左侧极限位置,如图8(a)所示,并导入plane平面如图8(b)所示。
(2)创建两条ruler,如图8(c)所示。ruler1为左眼视线,ruler1的一端定位在驾驶人的左眼球上,另一端刚好与车辆左侧A柱外侧相切;ruler2为右眼视线,ruler2的一端定位在驾驶人的右眼球上,另一端刚好与车辆左侧A柱内侧相切。
(3)导入plane0及plane1并进行选择和平移操作,使平板的一角与眼球位置重合,平板底部与视线重合,平板与水平面成90°,如图8(d,e)所示。plane0与plane1在YOZ平面上相对于原始坐标系的偏转角θ1=21.1°,θ2=26.1°。
(4)plane0和plane1在YOZ平面上的夹角即为车辆驾驶室左侧A柱的双目障碍角。两平面的夹角通过其在YOZ平面上偏转的角度得出,其偏转角度之差即两平板的夹角θ,θ=θ2-θ1=5.0°,即所校核车辆驾驶室左侧A柱的双目障碍角为5.0°<6.0°,满足《汽车驾驶员前方视野要求及测量方法》所规定的要求。

图8 驾驶人的左侧A柱双目障碍角的校核流程
4.2 右侧A柱视野校核
对驾驶人右侧的A柱双目障碍角的校核流程如下:
(1)转动驾驶人头部至右侧极限位置,如图9(a)所示,驾驶人视线仿真如图9(b)所示。
(2)创建两条ruler,如图9(c)所示,ruler1为左眼视线,ruler1的一端定位在驾驶人的左眼球上,另一端刚好与车辆左侧A柱外侧相切;ruler2为右眼视线,ruler2的一端定位在驾驶人的右眼球上,另一端刚好与车辆左侧A柱内侧相切。
(3)导入plane0及plane1并进行选择和平移操作,使平板的一角与眼球位置重合,平板底部与视线重合,平板与水平面成90°,如图9(d,e)所示。plane0与plane1在YOZ平面上相对于原始坐标系的偏转角为:θ1=-66.6°,θ2=-62.8°。
(4)plane0和plane1在YOZ平面上的夹角即为车辆驾驶室右侧A柱的双目障碍角。两平面的夹角通过其在YOZ平面上偏转的角度得出,其偏转角度之差即两平板的夹角θ,θ=θ2-θ1=3.8°,即所校核车辆驾驶室右侧A柱的双目障碍角为3.8°<6.0°,满足《汽车驾驶员前方视野要求及测量方法》所规定的要求。

图9 驾驶人的右侧A柱双目障碍角的校核流程
5 讨论
我国的《汽车驾驶员前方视野要求及测量方法》对V点、P点R点、E点的确定、汽车驾驶员前方视野及A柱双目障碍角的测定条件、测定方法做出了详细的说明,并要求:每台车辆不得多于两根A柱且每根A柱的双目障碍角不超过6°;若驾驶员侧和乘客侧的A柱相对车辆中央纵向铅垂面是对称的,则乘客侧的A柱双目障碍角不需要再测量。
若车辆A柱的双目障碍角达不到国家标准的要求,会增加驾驶员的视野盲区,为了减少盲区带来的不利影响,驾驶员需要更加频繁地转动眼睛和头部来观察前方的路面状况,这更容易引起驾驶员的操作疲劳,不利于驾驶员的安全驾驶,因此从安全的角度来看,车辆的A柱的双目障碍角在时间和空间上必须要满足国家标准的要求。通常当车辆A柱的双目障碍角不能满足要求的时候,可以通过调节座椅的位置或是在满足车辆驾驶室刚度和强度的情况下,减小A柱的结构尺寸等措施来对A柱双目障碍角的大小进行调节,使A柱的双目障碍角能满足国家标准的要求。选用尺寸为95%的中国人体尺寸模型,符合中国人体特征,从统计学上讲、95%的人体尺寸模型涵盖了国内绝大多数的驾驶人的身体参数。
相关研究表明:汽车A柱双目障碍角的大小与A柱的结构参数以及驾驶人眼点距离A柱的距离等因素有关。从空间结构上来看,车辆的驾驶室越小、A柱距离驾驶人眼睛越近,A柱的双目障碍角也就越大;在保证车辆驾驶室刚度和强度的情况下,A柱的结构尺寸越小,A柱的双目障碍角就越小[26,34]。
本文研究中,利用简化的A柱障碍角测量方法,该方法更适合于Jack软件,利用Jack仿真软件对车辆A柱的双目障碍角进行校核,校核结果为:目标车型车辆的左侧驾驶人A柱双目障碍角为5.0°,右侧A柱双目障碍角为3.8°,均满足国家标准对驾驶人前方视野A柱盲区的要求。但是可以发现左侧A柱双目障碍角要大于右侧,从空间上来看,这主要是由于驾驶人眼点距离左侧A柱的距离较近,而距离右侧A柱的距离较远,故而该型车左侧的A柱障碍角大于右侧是合理的,这与上述其他研究的结论是一致的。
6 结论
基于人机工程学原理,针对国内某一固定型汽车,利用Jack软件建立仿真车辆模型及符合中国人体特征的驾驶人模型,根据简化的A柱障碍角测量方法,使用Jack软件自带的分析工具,对国内某型车的驾驶室双侧A柱障碍角进行校核分析,研究表明,该型车左侧A柱双目障碍角为5.0°,右侧A柱双目障碍角为3.8°,均满足《汽车驾驶员前方视野要求及测量方法》对驾驶员前方视野A柱盲区的要求。
