载人潜水器运行管理机制探析
2019-09-10齐海滨李德威刘保华杨雷刘晓辉
齐海滨 李德威 刘保华 杨雷 刘晓辉
摘要:为了探索深海,不同类型的深海运载装备得以成功开发,并应用于深海科学、资源勘探开发、工程保障及战略安全等不同领域。深海运载装备可以分为载人潜水器(HOV)、遥控深潜器(ROV)、自治式深潜器(AUV)及混合型深潜器,其中以载人潜水器为代表的高技术装备群成为建设海洋强国的重要保障力量。文章对美国“阿尔文”号、俄罗斯“和平I”号和“和平II”号、日本“深海6500”号、法国“鹦鹉螺”号、中国“蛟龙”号载人潜水器运行管理机制进行了阐述,综合比较其优缺点,提出了建立职业化运行保障队伍、优化作业流程,创新组织结构、探索多型潜水器海上作业模式等运行管理机制构架的建议。
关键词:载人潜水器;深海科学;资源勘探开发;作业流程;运行管理
中图分类号:P7 文献标志码:A 文章编号:1005-9857(2019)07-0003-05
Abstract:In order to explore the deep sea,different types of deep-sea carrier equipment have been successfully developed and applied in different fields such as deep-sea science,resource exploration and development,engineering support and strategic security.Deep-sea carrier equipment can be divided into manned submersible (HOV),remote-controlled deep-sea submersible (ROV),autonomous deep-sea submersible (AUV) and hybrid deep-sea submersible,among which the high-tech equipment group represented by manned submersible has become a major guarantee for building a marine powerful nation.In this paper,the running management mechanism of manned submersible was expounded,such as “Alvin”“MIR I&II”“SHINKAI 6500”“NAUTILE” and “JIAOLONG”,their advantages and disadvantages were comprehensively compared,the advices of operational management mechanism architecture for establishing a professional operation security team,optimizing operation process,organization structure innovation,exploring more type submersible offshore operation management mechanism,and so on were put forward.
Key words:Manned submersibles,Deep sea science,Resources exploration and development,Operational process,Operation management
0 引言
海洋蘊藏着丰富的自然资源,其重要的战略地位也在人类对海洋不断加深的认识中越来越重要。为了探索深海,不同类型的深海运载装备得以成功开发,并应用于深海科学、资源勘探开发、工程保障及战略安全等不同领域。深海运载装备可以分为载人潜水器(HOV)、遥控深潜器(ROV)、自治式深潜器(AUV)及混合型深潜器,其中以载人潜水器为代表的高技术装备群成为建设海洋强国的重要保障力量[1]。
目前全世界的HOV总数约200余艘,根据2013年世界船级社统计数据显示,正在使用中的HOV为95艘,其中:美国船级社30艘,法国必维船级社4艘,中国船级社1艘,挪威船级社4艘,德国劳氏船级社18艘,印度船级社2艘,美国海军2艘,英国劳氏船级社19艘,日本海事协会1艘,意大利船级社2艘,其他12艘。但可潜入 6 000 m深的只有6艘。正在研建的有3艘,包括正在研建的中国“彩虹鱼”号及日本“深海12000”。6 000米级有较成功应用的深潜器包括美国的“阿尔文”号、日本的“深海 6500”号、法国的“鹦鹉螺”号、俄罗斯的“和平Ⅰ/Ⅱ”号(Mir I/II)、中国的“蛟龙”号[2]。
据统计,迄今美国的“阿尔文”号已经成功完成了5 000次下潜;日本的“深海 6500”号作业潜次已超过1 500次;俄罗斯“和平Ⅰ/Ⅱ”号以两条HOV互为替代,因具备较高的能源储备,表现出较好的作业能力;法国“鹦鹉螺”号潜水器迄今已完成超过1 800余次下潜作业,其在军事领域应用最为频繁;应用时间最短的中国“蛟龙”号潜水器也已完成近160次下潜任务。在实际应用中,每个潜水器因为背景、理念、需求的差异形成了不同的运行管理体制,本研究将对以上5个国家潜水器运行管理机制进行论述,并就如何更高效地运行载人潜水器进行探讨。
1 国内外载人潜水器运行管理现状
1.1 美国“阿尔文”号载人潜水器
“阿尔文”载人潜水器建成于1965年,经过多次的增改装,目前属于美国海军,编号DSV-2,由伍兹霍尔海洋研究所(WHOI)负责日常的管理、应用和维护,“阿尔文”号主要是为科学家们服务的,任何美国科学家(或与其合作的外国科学家)都可向美国科学基金委申请使用“阿尔文”号。
WHOI设置了一个叫DSOG(The Deep Submergence Operations Group)的部门来管理“阿尔文”号,这个部门有13个人员编制,包括驾驶员、培训驾驶员以及技术员,这个团队的领导由驾驶员担任。
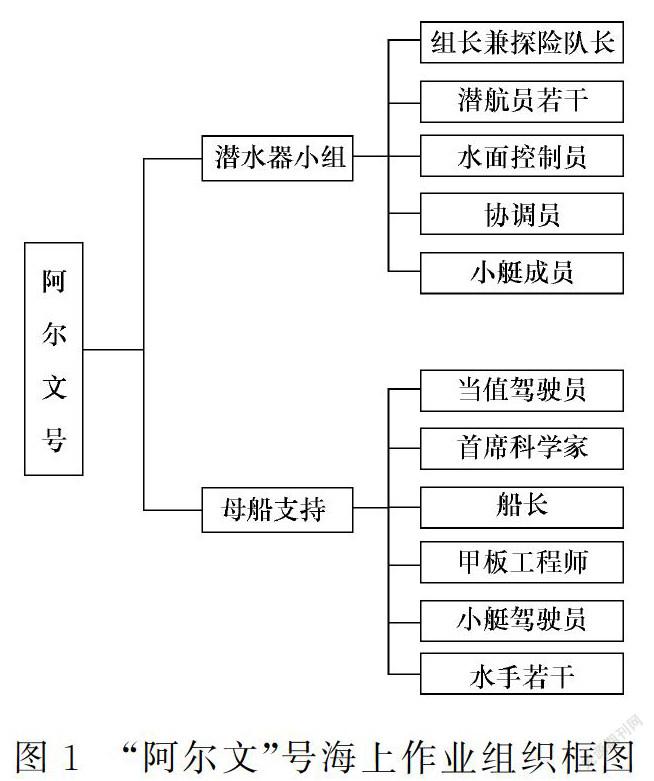
“阿尔文”号执行海上任务期间,主要组织结构分为潜水器小组及母船支持组,潜水器小组由组长兼探险队长、潜航员、水面控制员、协调员、小艇人员组成;母船支持组由当值驾驶员、首席科学家、船长、甲板工程师、小艇驾驶员及水手组成,如图1所示具体岗位设置如下。
(1)探险队长1名,下潜任务的最高决策者,拥有决定是否下潜、执行哪些任务,谁来担任各个工作岗位的权力,兼任潜水器小组的组长。
(2)首席科学家1名,科学活动的组织者和领导者。
(3)船长1名,支持母船的领导者、负责安排船上的海员、设备以及船舶航行 。
(4)潜航员1名,负责潜水器的驾驶,来自潜水器小组的正式潜航员。
(5)水面控制员2名,上午和下午各1名,以午饭时间为界,负责水面控制,来自潜水器小组。
(6)当值驾驶员多名,在舰桥驾驶母船,由船上的大副、二副、三副以及高级水手担任。
(7)甲板工程师1名,负责母船甲板设备的运作。
(8)小艇驾驶员2名,布放和回收各1名,负责驾驶小船,来自母船上的二级水手。
(9)A形架操作员2名,布放和回收各1名,操作A形架。
(10)协调员2名,布放和回收各1名,利用无线电通信,协调各方工作,来自潜水器小组。
(11)水手4名,布放和回收各2名,负责缆绳的挂钩和解脱,潜水器水面上的检查和操作,来自潜水器小组和二级水手。
一般情况,来自潜水器小组的同一个人在1天内分别担任水面控制员和协调员;在执行1次任务的2个水手当中,必须有1人来自潜水器小组,该人操作水声电话;另一个人负责缆绳等工作。在严酷的环境条件下,会增加1名水手进行回收的工作。
每个潜次执行前,“阿尔文”号保障人员会对潜水器进行安全巡检及操作检查,形成检查表格,并由本潜次潜航员、水面控制员、母船船长、探险队长及首席科学家会签。
升级后的“阿尔文”号,载人舱一次能容纳3人,一般是1名潜航员、2名科学家。其执行下潜任务期间,有全套的程序手册可以遵循,其中包括潜水器下潜程序、上浮程序、水下操作限制程序、回收程序、紧急情况下的潜水器操作程序、潜水器载人舱内消防程序、紧急上浮程序、载人舱释放程序和水密失联后的操作程序等。潜水器的操作手册也会特地说明,没有任何一部操作程序可以涵盖所有可能发生的紧急状况,因此,潜水器的安全全部依赖于驾驶员的知识和技能,手册只能列出在明显紧急情况时的操作。但是,一旦使用该操作程序,必须严格地执行,以便水面控制员能够通过少量的通信就可以处理问题。如果对这个操作程序有任何更改,必须告知水面控制员[3]。
1.2 日本“深海6500”号载人潜水器
日本三菱重工業株式会社神戸造船所1989年建成了下潜深度为 6 500 m的“深海 6500”潜水器,水下作业时间8 h,曾下潜到6 527 m深的海底,共下潜1 500余次。“深海6500”号目前隶属于日本海洋-地球科学技术机构(Japan Agency for Marine-Earth Science and Technology, JAMSTEC)。
2004年4月,JAMSTEC 委托日本海洋事业株式会社(Nippon Marine Enterprises,Ltd)负责其所有科考船舶及潜水器的运营管理,其中就包括“深海6500”号载人潜水器。
“深海6500”号载人潜水器由10余人的保障团队负责其日常维护保障及海上作业。“深海6500”号载人潜水器对潜航员的培养,首先是从潜水器维护保障工作开始,在对潜水器有了较为熟悉的整体了解后,才开展潜航训练,根据培训课程内容要求,潜航员学员需要进行2~3年维护保障和多次潜航训练才能成为副驾驶潜航员,进行正式的下潜作业。副驾驶在多次参与正式下潜后,逐渐成长为具备独立下潜能力的主驾驶潜航员,这一般需要7~8年的时间[4]。
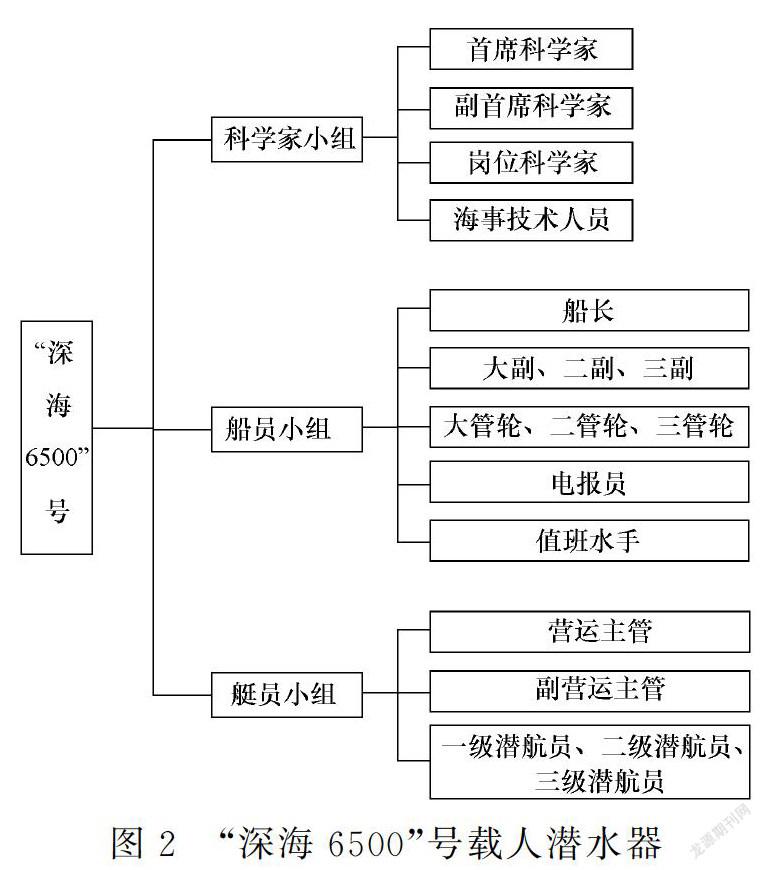
“深海6500”号执行海上作业期间,主要组织结构分为科学家小组、船员小组及艇员小组,科学家小组主要由首席科学家、副首席科学家、岗位科学家及海事技术人员组成;船员小组由船长、大副、二副、三副、轮机长、大管轮、二管轮、三管轮、电报员、值班水手等组成;艇员小组由营运主管、副营运主管、一级潜航员、二级潜航员、三级潜航员等。一般情况下运营主管由潜航队长担任[5] (图2)。
1.3 俄羅斯“和平I”号与“和平II”号载人潜水器
俄罗斯“和平I”号与“和平II”号载人潜水器修建于1985年5月,1987年12月开始运行,1994年和2004年进行过两次大修,该潜水器长7.8 m,宽3.6 m,高3.0 m,总重量18.6 t,最快速度5 kn,最大下潜深度6 000 m,其中“和平I”号的最大试验深度6 170 m,“和平II”号的最大试验深度6 120 m。“和平I”号“和平II”号载人潜水器隶属于俄罗斯希尔邵夫海洋研究所,该研究所是俄罗斯目前规模最大、设备最新、技术实力最雄厚的综合性海洋研究所。
俄罗斯希尔邵夫海洋研究所,设有“科学开发深海载人潜水器实验室”,深海载人潜水器运行团队,现有的潜航员同时也是“和平”号载人潜水器技术研发和专业维护人员。
两台“和平”号潜水器的专职潜航员3名,都能独立携带科学家完成科学考察和地质生物取样等下潜任务;专业技术人员6名,分别承担“和平”号潜水器各个分系统维修维护任务,同时也可客串潜航员进行下潜作业任务[5]。
1.4 法国“鹦鹉螺”号载人潜水器
法国海洋开发研究院在1985年研制成功工作水深为6 000 m的“鹦鹉螺”号的载人潜水器,重量为18.5 t,可载3人,水下作业时间5 h。法国海洋开发研究院(IFREMER)成立于1984 年5月,由原在布雷斯特的法国国家海洋开发中心(CNEXO)和南特海洋渔业科学技术研究所(ISTPM)合并而成,简称IFREMER。研究院受法国工业科研部和海洋国务秘书处双重领导,研究海洋开发技术和应用性海洋科学。
法国海洋开发研究院成立深潜部门(Underwater Systems Unit),该部门人员分为4个技术组,管理团队为10人,水下机器人组为10人,电气组9名,机械组13名,其中技术组的负责人均为管理团队成员,水下机器人组负责HOV、AUV、ROV的操作,其余技术组负责维护保养及研制工作[7]。
1.5 中国“蛟龙”号载人潜水器
“蛟龙”号载人潜水器项目是国家“十五”“863”计划的重大专项之一,于2012年在马里亚纳海沟下潜至7 062 m,创造了作业型载人潜水器的最大下潜深度。“蛟龙”号隶属于中国大洋矿产资源研究开发协会(COMRA),由国家深海基地管理中心(NDSC)负责运营。
国家深海基地管理中心下属的技术部负责“蛟龙”号的日常保障运营,该部门同时承担“海龙”号ROV及“潜龙”号AUV的部分保障工作。技术部现有“蛟龙”号潜航员团队8人、技术保障人员12人、技术工人2人,负责三型潜水器的操作及运行保障工作。
“蛟龙”号执行海上任务期间,执行临时党委领导下的航次现场总指挥负责制,现场总指挥由航次组织实施单位派出,现场指挥部和临时党委成员由主要参航单位人员组成。现场指挥部下设4个部门,分别是水面支持部门、潜水器部门、母船支持部门及科学家小组,每个部门的部门长均是指挥部成员。水面支持部门由水面支持副总指挥、水面支持部门长、A型架操作员、轨道车操作员、缆车操作员等组成;潜水器部门由潜水器部门副总指挥、潜水器保障部门长、潜水器作业部门长、超短基线操作员等组成;母船支持部门由船长、蛙人、当值驾驶员、当值轮机员、当值水手、当值机工等人员组成;科学家小组由首席科学家、岗位科学家组成。首席科学家、水面支持副总指挥、潜水器部门副总指挥、母船船长是现场指挥部成员,参与决策,并具有对潜次任务一票否决权[8]。
每个潜次执行前,科学家会同潜次主驾驶制订本潜次的作业计划,在现场指挥部会议上向指挥部成员汇报,现场指挥部结合气象、设备状况、科学目标等因素进行集中讨论后,决定是否执行下潜任务,会后首席科学家会签潜次作业计划表,报总指挥签署后正式执行。
2 问题及建议
综合国内外5家典型载人潜水器运行管理情况可知,目前,国际上尚未形成统一的运行管理机制。以俄罗斯“和平”号为代表的载人潜水器,是以研制人员为主要运行保障团队的管理方式,可以有效提高潜水器维护保障效率,便于进行潜水器升级改造等工作;以美国“阿尔文”号为代表的载人潜水器,是以科学目的为导向,以装备为重要保障条件的运行体制,科学目的明确,可以有效提高潜水器的使用效率;以日本“深海6500”号为代表的载人潜水器综合其他类型潜水器于一个保障团队,可以提高作业效率,降低保障成本,形成集群效应。
2.1 建立职业化运行保障队伍
考虑到载人潜水器的作业模式,综合国内外载人潜水器的使用情况,为了最大限度提高载人潜水器使用效率,降低运维成本,建立职业化的运行保障队伍是必不可少的,这支队伍不但能够承担潜水器驾驶任务,还需要具备熟练的专业技能,能够承担分系统的维护保障工作,同时具备一定的科研能力,可以从作业需求方面,对潜水器进行局部升级改进。
2.2 优化作业流程,创新组织结构
借鉴“蛟龙”号载人潜水器保障运行中“一人多岗、一岗多能”的工作理念、充分总结历年航次经验,建议通过优化岗位配置、提高设备自动化程度、缩减作业流程、细化航次及潜次任务等方式进一步降低人力成本、缩短海上作业准备时间,从而提高整体海上作业效率。
2.3 探索多型潜水器海上作业模式
随着人类对海洋认知的加深,单型潜水器已经不能满足人类对海洋探索的需求,载人潜水器虽具有独特的海底作业优势,但并不能包揽一切海底作业,将来,多型潜水器搭配使用,将会起到事半功倍的效果。比如对MH370客机的搜寻,集成各型潜水器的调查船舶,可以首先使用水下自治机器人(AUV)进行长时间、大范围内的搜索,确定疑似目标;使用遥控水下机器人(ROV)进行疑似目标排除乃至确认目标物,最后使用载人潜水器(HOV)进行精细作业,配合打捞等工作[9]。当然,不同的作业目标,决定了各型潜水器如何相互配合乃至联合作业的具体方式,因此探索多型潜水器海上作业模式、构建运行管理机制就变得尤为重要[10]。
3 结语
上述5个国家的典型载人潜水器,都因为其研制背景、政治体制、理念及需求等原因形成了不同的运行管理机制,但均能够有效保障潜水器的正常运行,并取得诸多的科学成果。综合比較,其运行管理机制各有所长,但也有很多的共同点,比如均具有国家财政支持背景、其保障团队基本由研发人员或经系统培训的人员组成、多数致力于建设装备共享平台(面向国内或国际)等。
参考文献
[1] 任玉刚,刘保华,丁忠军,等.载人潜水器发展现状及趋势[J].海洋技术学报,2018,37(2):114-121.
[2] KOHNEN W.Review of Deep Ocean Manned Submersible Activity in 2013[J].Marine Technology Society Journal,2013,47(5):56-68.
[3] BRUCE STRICKROTT W.The Deep Submergence Vehicle Alvin[J].The Journal Of Ocean Technology,2017,1(12):35-44.
[4] 運航チーム.[EB/OL].[2019-01-16].http://www.jamstec.go.jp/shinkai6500/pilots/.html
[5] Cruise report YK12-13 of Sanriku-Japan Trench [EB/OL].(2012-08-24)[2019-01-16].http://www.godac.jamstec.go.jp/darwin/datatree/e.html
[6] Deep-water inhabited underwater vehicles[EB/OL].[2019-01-16].https://ocean.ru/en/index.php?option=com_k2&view=item&layout=item&id=173&Itemid=166.html
[7] Nautile[EB/OL].(2018-04-26)[2019-01-16].https://wwz.ifremer.fr/cmsm/Les-Systemes/Nautile.html
[8] 张奕,丁忠军.“蛟龙”号载人潜水器安全保障制度构建研究[J].海洋开发与管理,2017,34(11):32-36.
[9] 刘峰.深海载人潜水器的现状与展望[J].工程研究—跨学科视野中的工程,2016,8(2):172-178.
[10] 杨磊,杜志元,陈云赛,等.我国三类典型深海运载装备应用技术研究[J].海洋开发与管理,2018,35(9):100-106.
