一种用于遥外测联合可视化的尺度变换方法
2019-08-05王玮
王 玮
(91550部队 大连 116023)
1 引言
飞行器飞行试验是由国家靶场组织实施,用以考核评定飞行器战术、技术指标的权威方式[1]。飞行器飞行试验遥测数据,是指遥测系统在试验中获取的如控制、压力、振动等飞行器相关参数[2~3];飞行器飞行试验外测数据,是指外弹道测量系统获取的飞行器位置、速度、姿态数据[4],遥外测数据是评定飞行器各项性能指标的重要数据依据[5]。
传统的遥测数据分析方式,是从传感器测量数据的角度,以“时间-测量值”二维曲线为主[6~7]。其主要缺点是关联信息匮乏,仅仅显示了传感器测量值,没能显示该传感器所在飞行器上的安装位置,更无法反映该采样时刻飞行器外测位置和姿态信息。随着飞行器性能的日趋增强,很多性能指标的评定,需要综合分析上述数据才能得以进行[8],故需要遥外联合可视化功能的提升,辅助相应分析工作的开展[9~10]。
遥外测数据的联合可视化,需要同时实现遥测测量数据、外测位置数据、空间姿态数据三大类数据的可视化。遥测测量数据,包括力学、温度等数十个测量物理量[11],需要将传感器数值与飞行器姿态综合到外测发射坐标系下,要解决飞行器模型坐标、传感器测量数值与外测发射坐标系显示数值之间的数值差;而外测位置数据自身转换到发射坐标系下,其X、Y方向与Z方向也存在巨大的数值差,如果以常规的等尺度方式对位置数据进行三维可视化,将完全无法描述Z方向的数值变化,也就丧失了联合可视化的意义,故需要通过可视尺度变换来解决这种数据差异[12]。
为此,本文提出一种用于飞行器飞行试验遥外测联合数据分析的可视尺度变换方法,该方法针对遥测测量数据、外测位置数据、姿态角数据三大类数据的数值差异问题,给出了可视尺度变换方法,在可视元素层次,实现了遥测数据与飞行器空间位置、姿态的有机融合。仿真实验表明,在该方法支持下,相比传统的二维曲线数据分析方式,能显著提升遥外测联合数据分析的信息综合程度。
2 遥外测联合数据可视化技术流程
遥外测联合数据可视化,其技术流程包括需求分析、功能分解、数据组织、可视编码四个阶段。流程从遥测数据处理技术人员与试验评估、研制部门等领域用户进行需求分析开始,依次经功能分解、数据组织、可视编码四个阶段,形成可视化结果。流程第一轮结束后,将初步结果提交用户,根据用户反馈,从需求分析环节重新开始流程步骤,通过流程的多轮循环迭代,逐步求精,最终形成用户满意的可视产品。
2.1 需求分析
飞行器飞行试验的遥测数据,涉及十余个技术领域。需要在需求分析阶段,由数据处理技术人员与相应技术领域用户共同分析、理解该领域用户的可视化需求。各领域通常有其特定术语来描述数据和问题,也有一些固定的工作流程来描述数据是如何用于解决领域问题,故该环节主要用于了解各领域用户的任务需求以及常用数据描述。
2.2 功能分解
功能分解阶段,要求数据技术人员将需求分析阶段确定的任务和数据描述,从领域特定的专用名词描述,转化为试验数据资源库能够提供支撑的具体数据对象。如试验遥测振动数据、压力数据、控制数据、时序数据、姿态角数据、外弹道位置、速度等结构化数据,以及传感器编号、传感器坐标、坐标系统定义等辅助数据。
2.3 数据组织
数据组织是方法的关键阶段。数据组织阶段,需要将功能分解得到的任务与数据描述,转换成试验数据资源库内的具体数据、数据属性及适于可视化的数据形式,需要对数据资源库进行检索与提取操作,并对提取出的数据进行预处理、标准化、坐标转换、尺度变换等计算,使数据具备进行可视编码的数据结构与形式。
2.4 可视编码
可视编码阶段,根据数据组织阶段形成的数据基础,采用“点、线、面、体”等二维、三维图形组件及组件控制技术,选取适合遥测数据应用内容的可视化元素,完成遥测数据可视化呈现。常用图形组件点元素如图1所示。

图1 常用图形组件“点”元素
3 可视尺度变换关键技术
可视尺度变换属于遥外测联合数据可视化的数据组织阶段,是数据组织的最后计算环节,其主要目的,是解决遥外测数据在可视化中的数值差距问题。如某型飞行器外测位置数据的三维可视化过程中,发射坐标系下X、Y、Z三个方向位置数据之间存在较大的数值差距,X方向最大达到800km,Z最大仅有5km,如果以常规的相同坐标比例尺度进行可视绘图,小尺度数值变化将完全被大尺度数值变化掩盖,即从可视化上将观察不到Z轴方向变化(如图2所示),三维可视“退化”为二维可视,丧失了可视化的信息含量。
本文结合遥外联合数据可视化的应用需求,首先给出外测位置数据的可视尺度变换方法,再利用获得的外测可视尺度数据,进行遥测数据的可视尺度变换。

图2 等尺度三维飞行位置可视绘图
3.1 外测位置数据可视尺度变换方法
外测位置数据的可视尺度变换方法,方法的输入,分别为X、Y、Z三个方向位置数据,首先获取某方向外测位置数据的最大、最小值;结合最值进行尺度变换,获取坐标尺度;再分别根据最值情况设定可视区域的显示范围。方法的输出为X、Y、Z三个方向变换尺度Scale和坐标范围Ax。
以X方向位置数据序列为例,外测位置数据可视尺度变换方法流程如图3所示。使用该方法重新处理图2的外测位置数据,结果如图4所示。
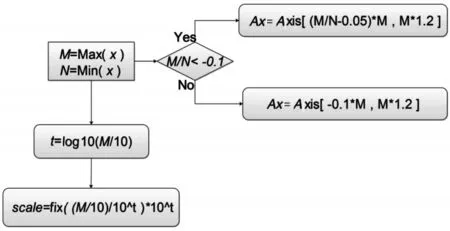
图3 外测位置数据可视尺度变换方法流程

图4 外测位置数据可视尺度变换可视化结果
3.2 遥测力学传感器数据可视尺度变换方法
遥测力学数据是遥测数据的重要组成,根据遥外联合数据可视化的应用需求,以及遥测力学数据的物理特性,选择“箭头”作为主要可视化元素。
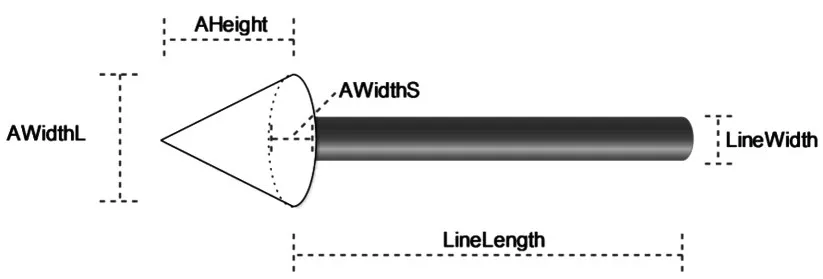
图5 箭头可视元素的4个控制参数
首先需设定“箭头”可视元素的5个控制参数,如图5所示。箭头头部为椭圆锥,AWidthL、AWidthS分别为锥底椭圆的长轴和短轴。首先获得该遥测传感器数据序列Cdata的最大、最小值,根据外测位置数据可视尺度变换获得的发射坐标系X、Y、Z三个方向变换尺度XScale、YScale、ZScale,计算遥测力学数据的变换尺度CScale,使该遥测传感器的最值,能够在外测发射系可视空间里有效显示;再根据发射坐标系X、Y、Z三个方向的坐标范围,结合该遥测传感器数据序列中的具体数值cdata,计算获取遥测箭头可视元素的5个控制参数数值,方法流程如图6所示。

图6 遥测力学数据可视尺度变换方法流程
4 仿真实验
本文采用仿真实验验证该方法的有效性,仿真数据包括某型飞行器某采样时刻的遥测瞬时冲击数据;该传感器触点在飞行器体坐标系上的安装位置;该采样时刻飞行器外测位置坐标、空间姿态数据(俯仰、偏航、滚动三个姿态角),如表1所示。
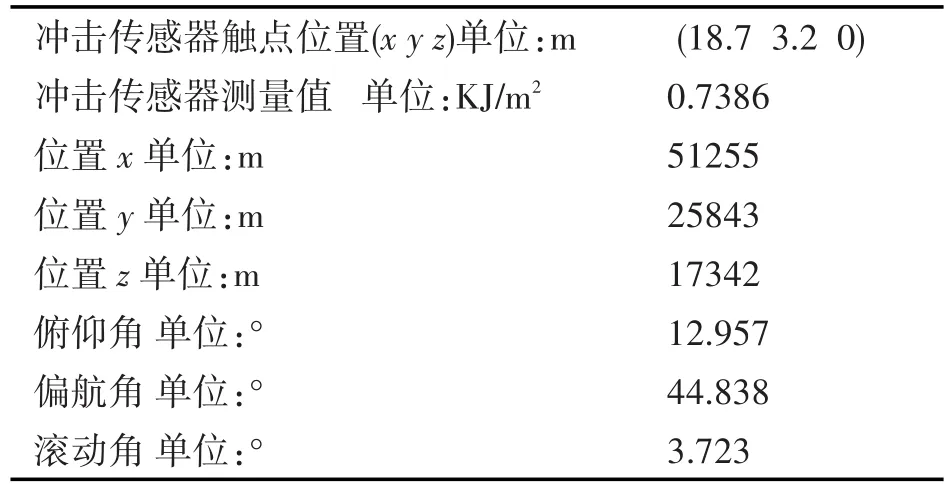
表1 采样时刻数据表

图7 遥外测联合数据可视化仿真结果
通过文中的可视尺度变换方法,进行遥外测数据的联合可视化仿真,结果如图7所示。其中,飞行器尾翼红色箭头,表示遥测冲击数据;空间三维曲线,表示外测位置数据;飞行器模型姿态,表示空间姿态数据。实验结果显示,该方法实现了遥测冲击数据与飞行器外测位置、姿态数据的联合可视化,可视结果符合物理实际与专业人员观察习惯,具有较好的分析辅助作用,实现了遥外测数据的可视信息融合。
5 结语
为此,本文提出一种用于飞行器飞行试验遥外测联合数据分析的可视尺度变换方法,有效地抑制了遥测测量数据、外测位置数据、姿态角数据之间的数值差异,实现了遥测数据与飞行器空间位置、姿态的可视信息融合,相比传统的二维曲线数据分析方式,显著提升了遥外测联合数据分析的信息综合程度,具有较大的推广价值。
