某型舰船电力监控系统设计缺陷与排除
2019-08-05郭征征
刘 镝 郭征征
(91404部队 秦皇岛 066000)
1 引言
舰船电力系统是一个规模较小,但又十分复杂的系统,其为舰船推进系统、作业系统、航行设备等提供电力。电站系统作为舰船电力系统的核心,由发电机组、主配电板及电站监控装置等组成。在全系统运行过程难免会出现各种故障,为确保电力系统的安全、稳定运行,确保供电连续性,提高电力系统的供电生命力[1],电力监控系统应运而生。电力监控系统,即通过计算机或者其他通讯设备,实时监控系统的运行情况、工作状态以及各方面的信息等。电力监控系统具备多种功能,能实现数据的分析、处理和储存,在供电配电设计中使用电力监控系统,可以大大地提高系统的工作效率、节约电力资源和消费成本,它是供配电系统中十分重要的一部分[2]。舰船电力监控系统更注重电力资源调配、电网安全保护以及监测故障报警等,是舰船操作人员实时掌握舰船电力信息、控制电力资源提供最重要的渠道。
2 某型舰船电力系统
2.1 电力系统组成
某型舰船电力系统由前后2个电站,每个电站2台柴油机发电机组成,满足舰船进出港、停泊、应急、战斗等各种工况下的用电需求。电站由4台P额kW柴油发电机组,并配备有交流主配电网络、事故电力网、蓄电池组等辅助电力设备。如图1所示,DG1-DG4为4台柴油发电机组,通过QF1-QF4隔离断路器与电网系统连接,QF1具有对主干线路的保护功能。当线路出现故障,能够检测到的两个变化量分别是突变电流和电流方向,通过这两个量的变化来制定相应的判据,以实现对主干线路的保护[3]。QF5-QF8为跨接断路器,用于电力网络组网和隔离。跨接断路器的目的是为了实现环网的重构,在分组并联的两个发电机都故障的情况下需要通过环网重构来对该组负载进行供电,跨接断路器能实现无电压时自动重构和地面通电检查完毕后的自动断开,整个过程实现了自动化[4]。QF9为岸电断路器,用于连接岸电的主要开关。岸电是在停泊港口或电力应急等情况下使用,通过岸电断路器QF9与岸上电源连接。

图1 某型舰船电力系统结构示意图
2.2 电力系统运行
任意两台或三台发电机组可长期并联运行或转移负荷。每台发电机组可单独运行。任一台发电机与岸电间可短期并联带电转移负荷。电站采取机电集控室(通用监控管理台)、主配电板室(机组控制器)和机旁(机旁控制箱)三级监控。同时采取分级保护措施,使系统故障时将其影响限制在最小范围。电机增减顺序按照预先设定的优先级,优先级高的电机优先并入或减退,优先级低的电机在优先级增减后或因故障无法增减的情况下逐级增减。电站控制方式根据自动化控制程度分为手动、半自动、自动和集控。QF1-QF4隔离断路器是电站并网或隔离的控制开关,决定了电力系统的供电电机,也对电力系统网能够起到保护作用;QF5-QF8跨接断路器,用于前后电站的并网重构或者隔离,对电力体统网络具有保护作用。
3 问题的提出
3.1 试验现象
在自动控制模式下,进行1号机组的逆功保护试验,当时的在网机组为1、2、3号机组,备用机组优先顺序设置为1、3、2、4。在机组控制器上,通过手动调节1号机组转速,使得1号机组出现逆功保护。在试验进行时,出现了全舰失电,引起部分电子仪器仪表设备等出现故障,其他相关试验无法继续进行。
3.2 故障分析
当时由于试验任务的需要,舰上部分设备关机,使得舰上负载保持在700kW左右。按照电力监控自动减机程序判断准则,此时在网负载已经低于两机自动减机规定负载750kW,更远远低于三机并网条件。在电力监控系统的自动控制下,2号机组由于优先级别低,率先进入减机程序,减速退出;在网机组变为1号和3号机组,在网负载达不到两机并网条件,3号机组也自动进入减机程序,减速退出。此时1号机组逆功跳闸,3号机继续执行自动减机程序,造成全船失电。根据故障现象,检查电力监控故障记录信息,可以判定是由于电力监控自动减机程序判断准则设计存在一定缺陷,没有充分考虑此等情况,将原有准则上增加条件:当双机并网过程中,在网负载小于双机并网规定功率,而优先级别高的机组出现故障被隔离时,另一机组应立即停止减机程序,继续在网供电。
4 仿真实验
4.1 模拟故障实验
基于Matlab软件中Simulink仿真平台,利用SimPowerSystems库中的电力、电子元器件建模,按照原有的电力监控自动减机程序判断准则,对逆功保护试验出现的逆功保护进行模拟试验,采集电网中的电压、电流。如图2所示,图上部分为电压变化情况,下部分为电流变化情况。根据判定准则的规定,3号机组在2.8s左右执行减机程序,并在1号机组逆功跳闸后未停止减机,继续执行退出命令,从而整个电网中电压、电流快速趋于零,造成全船失电。

图2 模拟故障时电压电流变化图
全舰失电一定时间间隔后,电网将进入失电自启动程序,优先级高的机组将自动启动,并网运行,电力系统将恢复供电,仿真实验中不作相关描述。
4.2 对比实验
根据前期的分析,修改相应的自动减机程序判断准则,并利用电力系统模型进行修改准则后的仿真实验,同样采集电网中的电压、电流,观察其变化情况。可以从图3中看出,在1号机组逆功保护跳闸后,电网未出现全舰失电。由于全网负荷达不到两机并网运行,3号机组执行减机程序,而在此时,唯一在网供电的1号机组出现逆功跳闸,电网中电压、电流出现短暂震荡后,3号机组并未退出电网,继续为电网供电,整个过程中不会出现全船失电的类似情况。
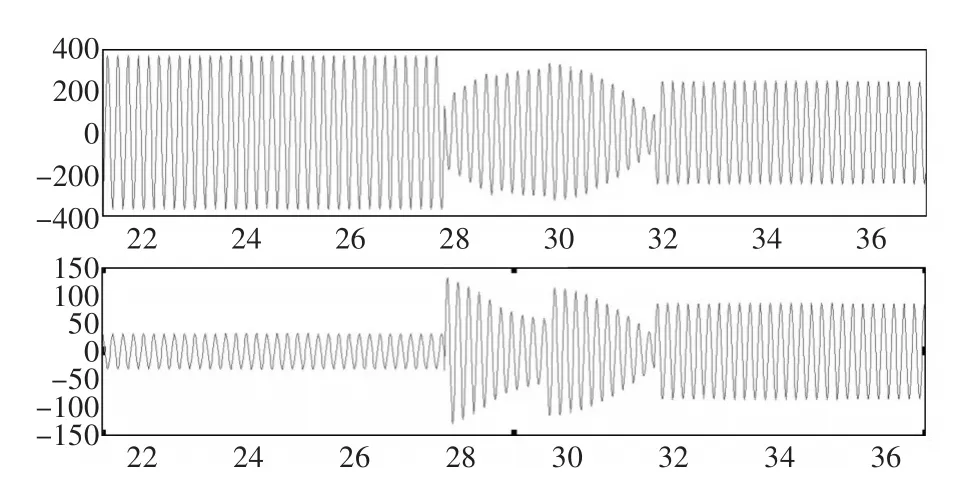
图3 修改准则后故障时电压电流变化图
5 缺陷排除
排除舰船硬件故障的方法很多,当前基于人工神经网络、粗糙集理论、信息融合技术的智能故障诊断技术得到了飞速的发展和较好的应用[5],然而在检测舰船设计缺陷方面的方法、手段却寥寥无几。设计缺陷问题通常是事后发现、事后分析、事后解决,发生问题后可采用分析论证、形成解决方案、仿真试验、试验验证等几个步骤,可参看图4。在解决设计缺陷问题方面,应当着重注意以下几个方面的内容:1)设计之初充分论证。在设计之初,应当充分全面的考虑,对可能存在的问题提出相应的应对措施,减少出现设计缺陷问题后所带来的风险性。2)试验检验时切忌以偏概全。无论是陆上联调试验、系泊航行试验,还是鉴定定型试验,都要充分考虑不同环境、不同条件下的试验,本着发现、解决问题的态度做试验,积极正视和勇于发现试验中的问题。3)分析问题时运用科学方法。在解决分析问题中,科学合理地运用分析方法,比如排除法、等效模型法等,排除无关紧要的干扰条件,寻找问题根本,经过分析论证后形成解决方案。4)仿真实验反复验证。在初步判定设计缺陷问题后,不要急于解决问题,应当借助相应的仿真工具,进行充分、反复的实验验证。5)通过试验进一步论证。经过仿真实验充分验证后,再在舰船上试验验证,直到问题完全解决。

图4 排除缺陷问题的方法步骤
6 结语
在技术厂家修改完善自动减机程序判定准则后,再次进行了逆功保护试验,经过分析,当时的2号机组为全船失电的干扰因素,故在后续试验中不考虑2号机组。1号、3号机组在网,在3号机组减速过程中,调节1号机组转速,直到其逆功保护跳闸,3号机组立即停止减速,继续在网供电,未出现全舰失电,应证了仿真试验的正确性。
通过判定准则的修改,弥补了该型舰船电力监控系统设计缺陷,减少了全舰失电的可能性,有效地保障了电力系统的可靠运行,增强了该型号舰船战斗力,同时为其他舰船电力监控系统设计的全面性提供了相应案例。
