基于C-CKF的单站外辐射源定位方法
2019-08-05舒益群陈启德
舒益群 陈启德
(1.海军航空大学 烟台 264001)(2.91049部队34分队 青岛 266000)
1 引言
外辐射源定位技术[1]是无源探测领域中的研究热点之一,是对传统有源探测方式的必要补充。外辐射源定位设备自身不发射电磁波,而借助民用或军用的各类辐射源来实现对目标的探测跟踪。单站外辐射源定位[2]仅靠一个接收站就可以实现对目标的定位,同时由于接收站的可移动性,极大提高了系统的灵活性,在运用部署上十分便利,而且同时具有传统外辐射源定位隐蔽性、反隐身等方面的优势[3~4],近年来受到了人们的极大关注。
当外辐射源为非合作时,无法获得准确辐射源位置给传统的外辐射源定位带来巨大的挑战。传统的外辐射源定位都是基于已知的辐射源位置来推导目标的位置信息,而且辐射源的位置常常还是固定的[5~6],在实际应用中受到很大的限制。而本文中采用的定位方法是基于非合作的机载外辐射源,外辐射源的状态也需要在定位过程中进行不断的更新。本文使用容积卡尔曼滤波来实现对目标状态以及辐射源状态的预测和更新。
文献[2]将目标与外辐射源的状态向量合并为一个扩展状态向量,来实现对目标以及辐射源状态的同时更新,但这种方式状态向量维数较大,滤波过程收敛较慢且容易发散。本文采用序贯方式依次更新目标与辐射源的运动状态。在生成量测的预测时,量测方程同时需要目标与辐射源的运动状态,这就导致了当前时刻已更新的目标状态会对后更新的辐射源状态造成影响。当已更新的目标状态的误差较大时,后面的辐射源状态更新过程会放大该误差。为了削弱这种影响,本文提出了基于交叉融合容积卡尔曼滤波算法(Cross-Fusion Cubature Kalman Filter,C-CKF),将不同更新顺序得到的状态估计进行融合,提高最新量测的利用率,减小随机噪声的影响,提高状态估计的可信度。
2 问题描述
基于非合作外辐射源的单站外辐射源定位模型[7]见图 1。
目标的状态向量为 X=[x,x˙,y,y˙]T,辐射源的状态向量为 Xt=[xt,x˙t,yt,y˙t]T,接收站的状态向量为 Xr=[xr,x˙r,yr,y˙r]T。其中目标与外辐射源都做近似匀速直线运动,其状态转移方程为
其中Ft与Ft,k分别是目标与辐射源在运动过程中的状态转移矩阵,vk与vt,k是各自运动过程的过程噪声。vk与vt,k都是零均值的高斯白噪声,且相互独立。
接收站分别接收来自辐射源的直达波以及目标反射的反射波,测量出目标相对接收站的方位角θk,辐射源相对于接收站的方位角φk,并通过两路信号的到达时间差计算出两路信号的传播距离差r以及传播距离差的变化率r˙。传播距离差里包含着达到时间差的信息,传播距离差的变化率里隐藏着多普勒频移的量测信息。因此,构造量测向量为,同时量测方程为

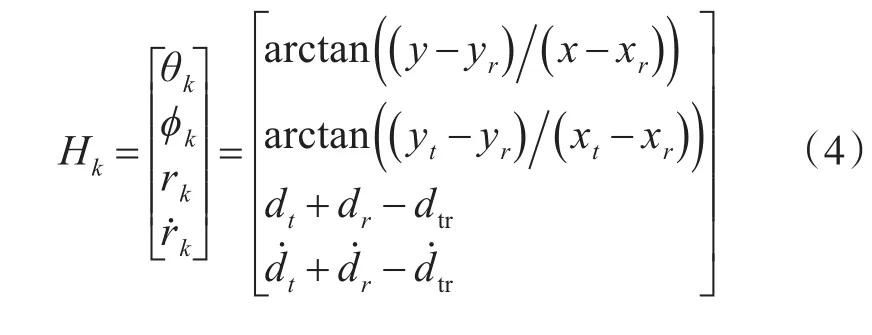
其中wk为量测噪声。wk为独立的零均值高斯白噪声。量测矩阵为其中dt表示辐射源与接收站之间的距离,dr表示目标与接收站之间的距离,dtr表示目标与辐射源之间的距离,d˙t、d˙r和 d˙tr分别是 dt、dr和 dtr的导数。其中

3 预备知识
3.1 容积卡尔曼滤波
针对非线性系统的滤波方法,通常分成两类[8]。一类是将非线性函数线性化的方法,其代表是扩展卡尔曼。扩展卡尔曼滤波需要对具体的非线性函数求取雅克比矩阵,步骤繁琐,因省略了高阶项,滤波精度有限。另一类是对非线性函数的后验概率密度进行模拟,因其常采用一系列确定的采样点进行操作,也被称为确定采样型非线性滤波。其中比较有代表性的是无迹卡尔曼滤波(UKF)与容积卡尔曼滤波(CKF)。基于“近似非线性函数的概率密度分布比近似非线性函数本身更容易”的思想,Julier等人在1997年提出了无迹卡尔曼滤波[9],它采用了UT变换去近似非线性住状态后验分布。容积卡尔曼滤波[10]是加拿大学者Arasaratnam和Haykin在2009年提出的,它基于球面径向容积准则采用了一系列容积点去近似非线性函数的后验概率密度,是当前最接近理想贝叶斯滤波的近似算法。
容积卡尔曼滤波的流程如下。
1)状态初始化
初始化状态向量x^k,协方差矩阵Pk,过程噪声协方差Q和量测噪声协方差R。
2)构造容积点

其中,n为状态向量的维数,ξi为容积点集。


3)状态一步预测

其中,权重wi=1/(2n)。
4)重新构造容积点

5)量测一步预测

6)状态更新
3.2 分布式状态融合
多源信息融合中的状态估计是一门不断发展的技术[11]。对于来自多个传感器的信息,通常包含了由不同观测方式得到的信息,经过信息融合处理后,可以实现信息互补,减小数据的不确定性。
设 X(k+1),Zi( )k+1是高斯变量,若X^i( )
k+1|k+1是给定Zi( )k+1时 X(k+1)的极大似然估计,Pi( )
k+1|k+1时对应的误差协方差,则k+1时刻的状态融合解[12]可以表示为

其中
4 基于交叉融合的容积卡尔曼滤波
4.1 传递误差现象
由于辐射源是运动的,其每一时刻的运动状态也需要进行预测和更新。鉴于目标与辐射源两者的运动是独立,不存在相互运动状态之间的干扰,因此在滤波过程中分别对两者的状态进行更新。不失一般性的,在本文中先更新目标的运动状态,再更新辐射源的运动状态。此时,经过仿真实验,发现当先更新的目标位置存在较大的误差时,会对辐射源位置的更新有较大影响,并时常出现滤波无法收敛的状况,如图2所示。

图2 传递误差示意图
当目标的跟踪曲线偏离真实状态时,辐射源的跟踪曲线也随之偏离真实状态,并且两者趋势相近,显示在RMSE上趋势更为明显。其原因在于目标的位置误差会在辐射源状态更新时,通过非线性量测函数H(X ,Xt,Xr)影响量测的预测值,带来不必要的误差。为了削弱这种误差传递效应,同时提高滤波精度,我们来考虑两种更新方式之中参数传递的关系:
根据卡尔曼滤波的设计思想,当前时刻的量测信息在滤波过程中起到的是对状态一步预测的修正作用,使得修正后的最优状态估计满足最小均方误差估计。K+1时刻的状态预测值 X^k+1|k仅包含k+1时刻之前的所有先验信息,而k+1时刻的状态估计值X^k+1还包含了k+1时刻的量测信息。
若按第一种方式更新辐射源的状态信息,在这次滤波循环中,不会发生先更新的目标状态的误差经非线性函数传递后扩大了对辐射源状态造成影响的现象,但是这种方式对于最新时刻量测的利用不够充分,对于状态一步预测的修正作用也欠佳。若按第二种方式更新辐射源的状态信息,能够充分得利用当前时刻的量测信息,但是会发生误差传递现象。
4.2 交叉融合规则
为了减轻误差传递现象的影响,同时改善噪声随机性对滤波精度的不利影响,基于多源信息融合[11]的思想,提出了序贯更新交叉融合算法。在分别更新目标以及辐射源运动状态的过程中,都需要相互的运动状态参数才能生成量测的预测。将依赖状态一步预测值的更新称为前置更新,将依赖状态估计值的更新称为后置更新。算法基本思想如下:
1)前置更新。在量测的预测阶段,使用状态一步预测值生成量测的预测,并完成状态的前置更新,得到。
3)状态融合估计。根据分布式状态估计融合算法[12],k+1时刻的状态融合估计及状态估计协方差为

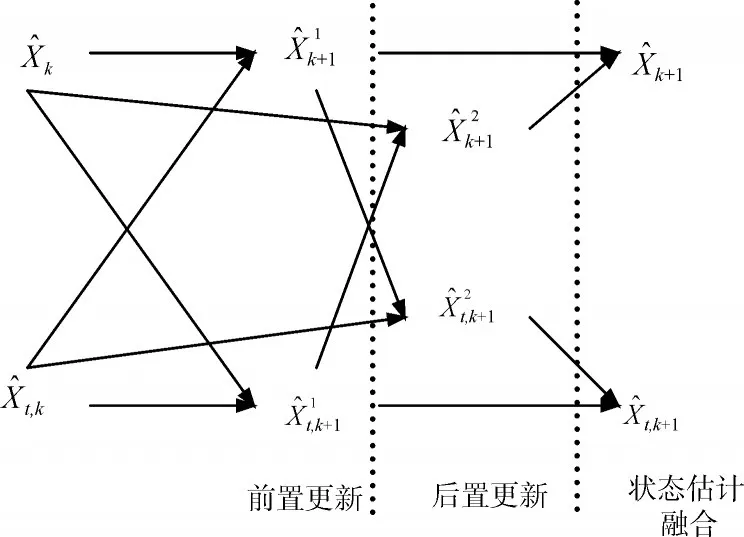
图3 交叉融合示意图
4.3 交叉融合容积卡尔曼滤波算法(C-CKF)
以K+1时刻为例,算法的简单流程如下:
步骤一:状态一步预测

步骤二:前置更新(基于先验信息)

步骤三:后置更新(基于后验信息)
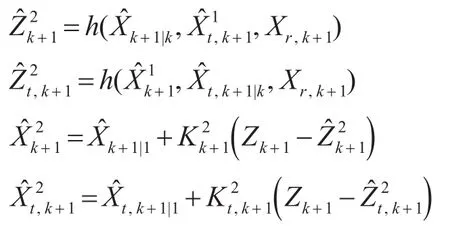
步骤四:状态融合估计
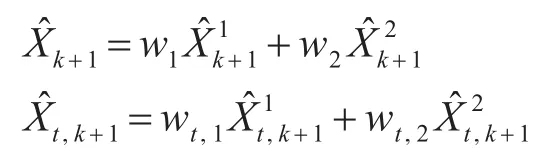
该方法解决了更新顺序可能带来的隐患,将目标状态的更新过程与辐射源状态的更新过程完全一致;同时,通过融合的思想,削弱了误差传递的影响,提高了量测信息的利用率,并提高了状态估计精度。
5 仿真
在笛卡尔直角坐标系中,对所提算法进行MonteCarlo仿真实验。MonteCarlo仿真次数取100。并以位置估计的均方根误差(RootMean SquareError,RMSE)作为度量算法精度的性能指标,定义如下:
仿真场景如下:目标与非合作辐射源都做近似匀速直线运动,接收站做近似圆周运动。目标的初始状态向量为X0=[20000m,200m/s,20000m,150m/s]T,过程噪声协方差为Q=diag{(0.5m)2,(1m/s)2,(0.5m)2,(1m/s)2}。 辐 射 源 的 初 始 状 态 向 量 为 Xt,0=[40000m,-100m/s,10000m,0m/s]T,其过程噪声协方差与目标的一致。接收站的初始状态向量为Xr,0=[6000m,600m/s,6000m,0m/s]T,运 动 半 径R=3000m。量测噪声协方差为R=diag{(0.005rad)2,(0.005rad)2,(100m)2,(2m/s)2}。仿真结果和分析如下。
对UKF方法、CKF方法与C-CKF方法分别进行仿真,对比三种方法定位误差的RMSE,仿真结果见图4。

图4 (a)目标跟踪误差曲线
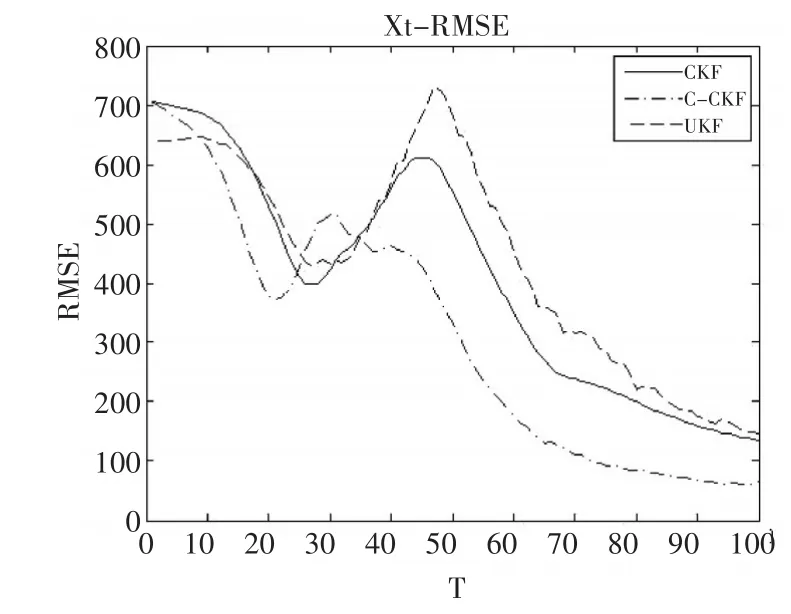
图4 (b)辐射源跟踪误差曲线
由图4(a)与图4(b)可知,三种滤波方法均能实现对目标以及辐射源的稳定跟踪。在三种滤波方法中,C-CKF方法、CKF方法在收敛速度以及滤波精度等方面都要优于UKF方法。这是因为CKF采用三阶容积法则的数值积分方法近似高斯积分的思想,其逼进非线性函数后验概率分布的精度要高于采用UT变换的UKF方法。同时,本文采用的交叉方法属于对量测信息的二次利用,因提升了对量测信息的利用,减小了随机误差的影响,拥有优于另外两种方法的定位精度以及收敛速度。
为进一步探究随机噪声对于定位精度的影响,分别改变状态噪声的各个参量,并进行仿真。各仿真环境见表1。

表1 不同噪声场景的均方差值

图5 (a)目标跟踪误差曲线
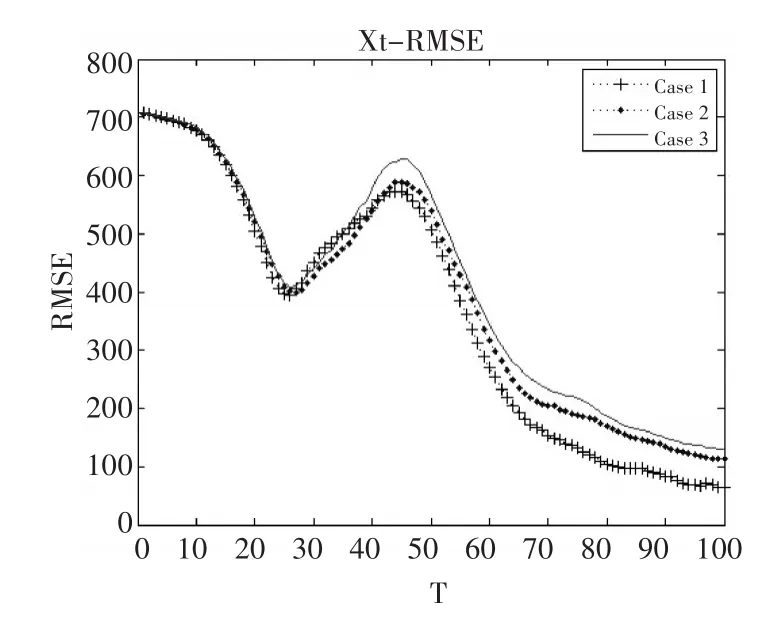
图5 (b)辐射源跟踪误差曲线
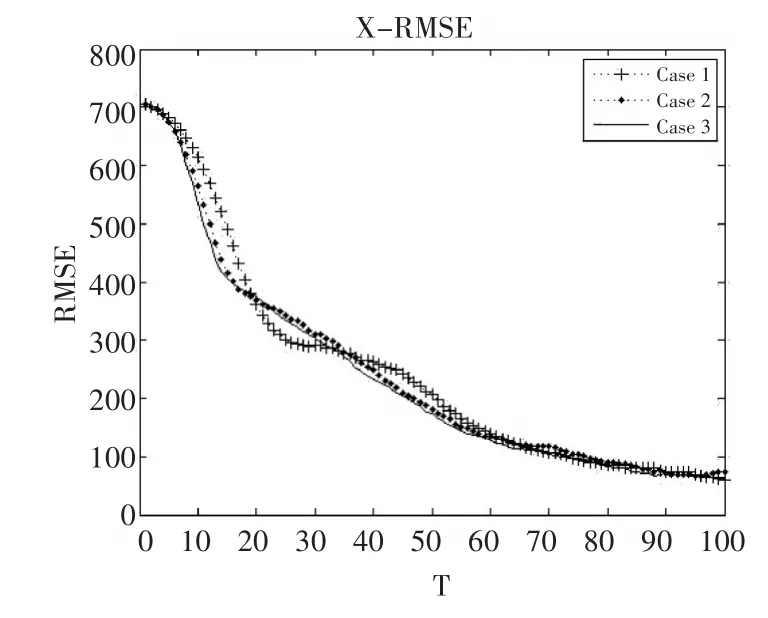
图5 (c)目标跟踪误差曲线

图5(d)辐射源跟踪误差曲线
图5 (a)与图5(b)是不同位置噪声环境下,目标与辐射源的跟踪误差曲线。图5(c)与图5(d)是不同速度噪声环境下,目标与辐射源的跟踪误差曲线。由图5(a)到图5(d)可知,当状态噪声增大时,目标定位误差以及辐射源定位误差均会随之增大。同时对比图5(a)与图(b),图5(c)与图5(d),辐射源定位误差比目标定位误差更容易受到随机噪声的影响。对比图5(b)与图5(d)可知,状态噪声中速度分量对于定位误差的影响要大于位置分量的影响。
6 结语
本文研究了利用非合作运动外辐射源进行运动目标的定位跟踪问题,将目标运动状态与辐射源运动状态作为两个独立的状态向量,分别进行更新,并采取不同的更新顺序分别得到对应的状态估计,经过融合处理后得到最优的状态估计。这种序贯更新目标与辐射源状态的方式相比将目标运动状态与辐射源运动状态联立为一个扩展运动状态的更新方式,能够有效减小运动状态维数,防止滤波发散并提高收敛速度,更重要的是,为处理多目标情形预留处理接口,并且方便对目标状态以及辐射源状态进行复杂处理。状态估计交叉融合阶段可以更加充分地利用最新时刻的量测信息,以及消除不同更新顺序带来的潜在影响,同时,冗余信息还有助于减小随机误差的影响。仿真结果证明,CF-CKF方法可以同时实现目标以及辐射源的定位跟踪,并且在收敛速度、定位误差方面均优于UKF、CKF方法。
