基于虚拟现实技术的救助船对外消防培训仿真系统
2019-07-21杨可男张均东叶子文伊泓嘉
杨可男 张均东 叶子文 伊泓嘉


摘要:针对救助船消防训练中存在的海况复杂,对外消防炮射流受风影响大,往往无法准确控制其射向目标区域的问题,在理想状态下射流理论的基础上探究风对射流轨迹的影响,建立自然风条件下射流轨迹的数学模型,模拟对外消防炮射流的运动情况。应用3ds Max构建船舶模型,用Unity 3D构建救助船在面临大风浪、遇险船着火等状况时对外消防系统的工作场景,提出一种精确构建粒子系统轨迹的方法,使射流模型能精确体现在场景中。通过虚拟现实设备能实现救助船对外消防培训仿真系统的立体显示和人机交互,起到更好的虚拟仿真和培训效果。
关键词:救助船; 水射流仿真; 对外消防系统; 虚拟现实(VR); Unity 3D
中图分类号:U676.8
文献标志码:A
收稿日期:2018-04-27
修回日期:2018-08-20
基金项目:中央高校基本科研业务费专项资金(3132016316)
作者简介:
杨可男(1993—),男,浙江绍兴人,硕士研究生,研究方向为轮机自动化与智能化,(E-mail)raykss@163.com;
张均东(1967—),男,浙江绍兴人,教授,博导,博士,研究方向为控制与仿真、轮机自动化与智能化、轮机模拟器,
Abstract:In the fire-fighting training of rescue ships under complex sea conditions, the water jet of external fire-fighting guns is influenced greatly by wind, so that it often can not control target area accurately. In view of the problem, the influence of wind on jet trajectories is analyzed based on the jet theory of the ideal state, and the mathematical model of the jet trajectory under the condition of natural wind is established to simulate the movement of water jet of external fire-fighting guns. The ship model is constructed by 3ds Max.By Unity 3D, the working scenes of the fire-fighting system of rescue ships under the conditions of large wind-wave and fire of ships in distress are constructed, and a method for accurately constructing the trajectory of the particle system is proposed, so that the jet model can be accurately shown in the scenes.The 3D display and human-computer interaction of external fire-fighting training simulation system of rescue ships can be realized through virtual reality devices, which improve the effect of the virtual simulation and training.
Key words:rescue ship; water jet simulation; external fire-fighting system; virtual reality (VR); Unity 3D
0 引 言
救助打捞船及其装备非常昂贵[1],救助打捞工作的时效性要求也非常高。在实际救助过程中海况复杂,对外消防炮射流受风影响大,操作人员往往无法轻松地把水流准确地射向着火区域。现阶段救助船对外消防训练都在实船上进行,不仅受场地、时间等因素制约,且不存在真实着火的遇险船舶。如能建立一套救助船对外消防培训仿真软件,用于日常模擬演练以掌握先进的救捞技术和专业技能,以及通过对已完成任务的回放来进行修正、优化和案例学习,则不仅对整个救助打捞工作的科学化、高效化具有重要意义,也与《交通运输部关于深化救捞系统管理体制改革的意见》中加强科研能力建设和系统装备建设的要求相一致。2018年1月6日,巴拿马油船“桑吉”号与中国香港散货船“长峰水晶”号在长江口以东约160 n mile处发生碰撞,导致“桑吉”号全船失火,经过3次、长达6 d的救助灭火也未能控制火情,造成了重大人员伤亡、财产损失和环境污染。这从某方面反映了救助灭火模拟器研究的迫切性。
救助船对外消防培训仿真系统依托于自然风条件下消防炮射流轨迹仿真、救助船六自由度运动仿真和虚拟人应用等,实现了较为真实的救助场景。孙健[2]探究了理想状态下的射流轨迹,PRAKASH等[3]揭示了水中横流条件下液体射流的状态,XIA等[4]探究了空气射流与水射流的对撞雾化。然而,这些研究未建立完整的自然风条件下的射流轨迹模型。在救助船运动建模仿真方面:陈卓等[5-6]研究了救助船模拟器原型机的关键技术,并提出了基于运动平台体感模拟的救助船模拟器;张秀凤等[7]在傅汝德-克雷诺夫假设的基础上,探究了海浪对船舶六自由度运动的干扰;徐静等[8]研究了船舶在波浪中的六自由度操纵运动模型。在虚拟人构建方面:戚福洲[9]提出了基于国际人体测量学数据的虚拟人构建方法;李石磊等[10]探究了虚拟人运动的生成与控制。而在虚拟现实(virtual reality, VR)方面,国内和国外的科研人员在虚拟机舱和虚拟航行领域都进行了一定的研究,但在救助船的VR模拟器领域的研究还较为欠缺,与当前海难多发的现状不符。
1 系统功能
1.1 功能概述
本文对救助船对外消防系统关键技术进行深入探究:在理想状态下射流轨迹模型的基础上探究并建立自然风条件下消防炮射流轨迹的数学模型;利用船舶六自由度运动模型实现在波浪作用下的船舶操纵;提出一种粒子系统轨迹构建方法,使仿真射流模型能精确体现在Unity 3D引擎下;构建仿真火灾场景和虚拟人,使其能完整模拟一系列对外消防系统的救助操作。受训人员可以在沉浸式的体验下熟悉对外消防系统的操作要领,明确救助流程规范,牢记注意事项以提高业务能力。
1.2 救助流程
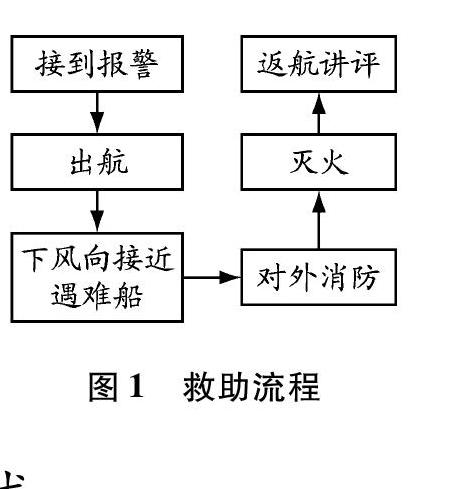
救助船对外消防系统涉及船舶操纵、救助规范和对外消防系统控制。本系统以8 000 kW救助船为母船型,按照实际救助流程进行培训,具体救助流程[11]见图1。
2 系统中的关键技术
2.1 理想状态下消防炮射流轨迹理论
在射流不受外界风力影响时,利用微元法,分析其单位体积、单位流量的微元仅在空气阻力和重力的作用(空气阻力方向与运动方向相反,重力竖直向下)下的状态。将单位质量看作是1,
式中,β为速度与水平方向的夹角。因此,若要求出射流轨迹方程,首先得确定初始速度V0和消防炮出射角β0,而速度与水压存在一定关系。依据伯努利方程,忽略内部损失,有根据上述方程,可建立理想状态下射流轨迹模型及其初始条件模块、运动模块和空气阻力模块。
2.2 自然风条件下射流轨迹仿真
由于在自然风条件下风对射流的影响较为明显,依据前人经验建立射流在无风条件下的模型后,建立自然风条件下的消防炮射流轨迹模型。分析可得微元在风作用下的受力如图2所示,其中Fw为风的阻力,α为风的阻力与水平方向右方向的夹角。应用伯努利方程可知,风压根据上述方程,将风的作用域看作A(x),并把必要参数和公式分别加入初始条件模块、运动模块和空气阻力模块(见图3~6),利用MATLAB/Simulink建立自然风条件下的三维射流轨迹曲线。
图3中:P为消防炮内压力;Q为炮内流量;A为炮口截面积;β0为出射角;Vw为正向风风速;Vzw为侧向风风速;V0为出射初速度(Vx0和Vy0是其分量);V为射流微元速度(Vx和Vy是其分量);Pw为正向风风压;Pzw为侧向风风压;Fx、Fy和Fz为3个方向上的阻力分量;x、y和z为3个方向上微元的位移;d0为有效截面直径。
在空气阻力模块中,利用空气阻力因数k(式(7))、有效截面积A(x)(式(9))和式(10)计算空气阻力及其各方向上的分量。
本系统采用Runge-Kutta算法和ode45求解器,系统仿真时间为10 s。初始条件如图3所示,即消防炮水压为1.45 MPa,流量为1 200 m3/h,炮口截面积为50 cm2,出射角为30°。在右前方68.2°、风速为5.39 m/s的风(仿真时解算为正前方来风,风速2 m/s,正右方来风,风速5 m/s)作用下的消防炮射流轨迹见图7。
图8的射流轨迹的初始条件为出射角45°、侧方来风-3 m/s和正向来风4 m/s。图9的射流轨迹的初始条件为出射角60°、侧方来风-10 m/s和正向来风-10 m/s。
由图7可得,出射点坐标为(0,0,0),最高点坐标为(96.96 m, 3.13 m, 37.20 m),由于消防炮高于海平面10 m左右,在图4运动模块中设置了y的极限值为-10 m,所以入水点坐标为(155.10 m, 23.51 m, -10.00 m)。由于在设置仿真参数时,仿真时间设置为10 s,在射流轨迹到达入水点时(5.883 s),实际对射流轨迹的仿真已经结束了,但由于未到仿真时间,出现了在入水
点后,水平高度为-10.00 m的一段曲线,应将其忽略。图10为该初始条件下速度随时间的变化情况,因篇幅有限,仅列出几组仿真数据,见表1。
2.3 仿真轨迹构建方法
由于Unity 3D中自带的粒子系统模型并不能完全反映真实情况下水射流轨迹,为将其完整呈现于Unity 3D引擎中,在Simulink中建立模型,得到各情况下的消防炮射流轨跡后,提出一种粒子系统轨迹构建方法:由于Unity 3D引擎中默认单位为m,且不可直接获取物体尺寸大小等有关参数,故取仿真射流轨迹上20个坐标点,利用坐标点在3ds Max中建立轨迹的精确模型,导出Fbx文件,再导入Unity 3D引擎中。为实现利用粒子系统构建消防炮射流,需要利用3ds Max模型上点的相对坐标。创建过程为:分别创建一个表示位置的数组(比如P1到P20的Position)和一个表示方向的数组;逐帧判断每个粒子的位置,根据当前粒子的位置和下一个坐标位置来确定它的移动方向,只要还在粒子的生命周期内,就让它移动到下一个点;当初始条件(仰角和风速)发生变化时,利用脚本依据仿真结果来控制20个坐标点移动,使水射流发生变化。该方法不仅可用于模拟水射流轨迹,也可在Unity 3D中用粒子系统精确模拟其他物体的运动。考虑到工作量,本文构建的对外消防炮仰角变化最小幅度为5°,风速方向最小变化幅度为15°,且风速在零级至十二级的13个等级内变化(救助船抗风等级为十二级)。在实际构建过程中,为使粒子系统真实美观,结合实际工况和仿真结果,在仰角-10°~60°范围内(超出60°时仿真结果与实际偏差会越来越大,不具参考价值,而在实际工况中几乎不会遇到低于-10°的情况),利用iTween插件进行构建,并利用脚本修改调试粒子系统(ParticleSystem)和风域(WindZone)参数,使虚拟射流轨迹接近仿真模型。图13为消防炮仰角与旋转角度一定,风速大小相同、风向不同时的消防炮射流轨迹。
2.4 火焰蔓延模型
火灾的发生一般分为4个阶段,即着火阶段、初期增长阶段、充分燃烧阶段、熄灭阶段。本文利用元胞自动机[13]分析救助过程中面对的充分燃烧阶段。选取Moore型元胞自动机模型,设中心元胞为(i,j),则元胞自动机的状态转换方程可表示为
式中,元胞在时刻t+1的状态既取决于周围8个邻域的元胞的状态,也取决于中心元胞在当前时刻t的状态。火灾产生的烟气在船舶舱室内的热传递过程受浮力和室内风的影响。浮力对火焰蔓延的影响概率为
式中:r为火焰蔓延的浮力影响系数,其值为格拉晓夫数与雷诺数的平方比;c1为调节系数;θ为火焰蔓延路径方向与竖直向上方向的夹角。风对火焰蔓延的影响概率为
式中:θ1为风向与火焰蔓延方向的夹角;c2和c3为调节系数。
综合分析这两种因素,燃烧元胞的蔓延方向选择为与其相邻元胞蔓延概率最大的路径方向,燃烧元胞与最大概率路径上的元胞能量平衡后,元胞内的参数发生变化,可得到下一时刻的元胞的新参数,即实现火焰从时刻t向时刻t+1的蔓延。
3 系统实现
利用3ds Max建立船舶、虚拟人和场景模型,添加材质,绘制UV贴图,在Unity 3D引擎下完成相应动画,依据文献[7-8]制作船舶六自由度操纵脚本。本系统可按图1的流程进行救助操作,图14a为出航场景,接到警报后培训人员依据当前方向和右下角雷达搜寻遇难船。
3.1 虚拟人
利用3ds Max构建虚拟人并绑定相应骨骼,在Unity 3D中制作人物进行各项操作的骨骼动画,在进行操纵杆等操作时,由于末端位置确定,故需利用反向动力学动画来实现;利用A*基本寻路算法[14],实现虚拟人在场景中的漫游,如图14b。为达到更好的培训效果,在进行灭火操作时,培训人员可根据需要选择以手动方式控制液压消防炮灭火,或者以遥控方式控制电遥控消防炮灭火。图14c为高海况下手动控制消防炮灭火的场景;图14d和14e为电遥控消防炮及其控制面板。图14e中:A和C为左、右舷离合器应急脱开按钮,用于负荷过大时脱开泵与齿轮箱之间的离合器;E为电源开关;B和D为左、右舷自保护水雾开关;F和G为左、右舷水炮控制手柄。
3.2 火灾场景
在火焰蔓延模型的基础上,利用粒子系统,构建真实的船舶火焰效果和烟雾效果;利用碰撞检测,根据碰撞物体标签(Tag)实现灭火。将消防炮水射流的Tag设置为WaterJet,并设置与火焰碰撞物的标签为WaterJet,两者碰撞超过一定时间时,播放火焰熄灭动画,并在系统信息窗口显示“局部灭火”或“火情解除”。构建未在有效时间内灭火导致的船舶爆炸、沉没场景,如图14f。
利用UGUI系统,设计对外消防培训仿真系统的操作界面,见图15。实现大风浪、天气良好等场景的随机切换;实现风速的随机变化,制作波浪、火焰、烟雾等随风速变化的效果;构建用户操作提示窗口,包括船舶控制、消防炮控制、风向风速参数设置等功能;构建系统提示窗口;实现消防视角、船舶操纵和讲评视角等多视角的转换;添加音效组件,实现各个场景和操作时的声音效果。
4 虚拟交互系统
随着各类船舶模拟器的普及和VR技术的不断发展,传统的PC端虚拟仿真系统越来越难以满足人们的需求。为增强VR的沉浸感和真实感,实现更好的仿真效果,利用2018年4月发布的最新款HTC Vive Pro設备提供的接口扩展和代码的二次开发功能,在PC端系统的基础上开发了基于VR的救助船对外消防培训仿真系统。HTC Vive Pro作为当前VR界最高性能的代表产品(见图16a),其双眼分辨率(像素)达到2 800×1 600,配备豪华型畅听头戴,并基于最新发布的SteamVR Tracking 2.0解决了第一代Vive基站振动大、吵闹以及长时间使用后同步率降低等问题,并且提供近100 m2的追踪空间,配套无线套件后会有非常好的体验。
在Unity 3D中,利用SteamVR插件来构建VR场景,利用各手柄事件完成系统的各项操作,如利用TriggerClicked(扳机按钮按下)和SteamVR提供的SteamVR_LaserPointer脚本控制射线传送,达到人物移动的效果;利用SteamVR_LaserPointer中PointIn和PointOut事件以及SteamVR_TrackController中的PadTouched(碰到触摸板)和PadUntouched(离开触摸板)事件抓取消防炮操纵杆实现消防炮的相应操作。HTC Vive Pro设备使得救助船对外消防培训仿真系统工作效果极为逼真,见图16b。
5 结束语
本文在理想状态下射流模型的基础上,对自然风条件下消防炮射流轨迹进行了建模与仿真,设计的模型可模拟任意初始条件(出射角、炮口截面积、流量、风速、风向)下消防炮的射流轨迹,且提出了一种在Unity 3D中精确建立水射流轨迹的方法,即构建粒子轨迹的方法。构建的救助船对外消防培训仿真系统提供VR场景体验;构建的水射流粒子系统提供真实操作感,对救助船船员操作培训有显著帮助,为基于VR的船舶模拟器研究提供借鉴。今后的研究方向为一方面优化火焰蔓延模型,另一方面与搜救辅助决策系统相结合,最终实现对救助灭火过程的真实模拟。
参考文献:
[1]王祖温. 救助打捞装备现状与发展[J]. 机械工程学报, 2013, 49(20):91-100.DOI:10.3901/JME.2013.20.091.
[2]孙健. 消防炮射流轨迹的研究[D]. 上海:上海交通大学, 2008.
[3]PRAKASH R S, SINHA A, TOMAR G, et al. Liquid jet in crossflow:effect of liquid entry conditions[J].Experimental Thermal and Fluid Science, 2018, 93:45-56.
[4]XIA Yakang, KHEZZAR L, ALSHEHHI M, et al. Atomization of impinging opposed water jets interacting with an air jet[J]. Experimental Thermal and Fluid Science, 2018, 93:11-22.DOI:10.1016/expthermflusci.2017.12.012.
[5]陈卓, 张晓磊, 熊伟, 等. 救助船模拟器原型机关键技术研究[J]. 舰船科学技术, 2016, 38(11):114-117. DOI:10.3404/j.issn.1672-7619.2016.06.023.
[6]陈卓. 基于运动平台体感模拟的救助船模拟器研究[D]. 大连:大连海事大学, 2016.
[7]张秀凤, 尹勇, 金一丞. 规则波中船舶运动六自由度数学模型[J].交通运输工程报, 2007, 7(3):40-43.
[8]徐静, 顾解忡, 马宁. 规则波六自由度回转运动预报[J]. 中国舰船研究, 2014, 9(3):20-27. DOI:10.3969/j.issn.1673-3185.2014.03.003.
[9]戚福洲. 基于国标人体测量学数据的虚拟人建模技术研究[D]. 成都:西南交通大学, 2014.
[10]李石磊, 梁加红, 吴冰, 等. 虚拟人运动生成与控制技术综述[J]. 系统仿真学报, 2011, 23(9):1758-1771.
[11]熊伟, 王海涛, 张会臣. 救助工程[M]. 大连:大连海事大学出版社, 2012:150-156.
[12]浦发. 外弹道学[M]. 北京:国防工业出版社, 1980:199.
[13]CHOPARD B, DROZ M. Cellular automata modeling of physical system[M]. Beijing:Tsinghua University Press, 2003:13.
[14]KLUNDER G A, POST H N. The shortest path problem on large-scale real-road networks[J]. Networks, 2010, 48(4):182-194.DOI:10.1002/net.
(編辑 赵勉)
