工业视觉和并联机器人在润滑油灌装自动上桶工序的应用
2019-05-08李桂健
李桂健
中国石化润滑油有限公司茂名分公司
润滑油产品灌装的上桶工序主要是为灌装机源源不断提供质量合格的空桶,上桶工序可采用人工或自动上桶机完成,但随着润滑油生产需求的不断扩大,这2种方式已逐渐不能满足生产需要,以润滑油4 L灌装线为例:
◇人工上桶。在灌装速度超过一定值时,至少需要2个以上操作工才能满足上桶要求;且无法对每一个桶面标签内容的正确性都逐一进行检查。
◇自动上桶机。虽然能实现4 L桶的自动上桶,但在需要进行不同规格产品切换时,同一台上桶机不一定能满足不同规格产品的自动上桶,或需要进行人工调整才能实现切换,浪费有效的作业时间;且也不能对桶面标签内容的正确性进行自动识别和剔除。
工业视觉和并联机器人技术目前正不断发展、成熟和普及。本文应用工业视觉识别系统对输送带上平躺的、无规则的4 L桶进行位置、方向和正反面的识别,然后再利用并联机器人对桶进行抓取和定位,不但能实现4 L桶的自动上桶,也能实现不同规格的4L桶间的一键切换;同时,通过视觉识别剔除装置还能对每一个桶的桶面标签内容进行检查,对桶面标签存在缺损或内容出现错误的进行自动剔除,提高设备的防错能力。
系统组成
机器人自动上桶机主要由7部分组成,见图1。
空桶上料仓

图1 机器人自动上桶机组成
用于存储空桶,人工把一袋袋的空桶倒到上料仓,上料仓根据自动上桶机的需求通过安装于底部的输送带自动往空桶输送带送桶。
空桶输送带
空桶输送带将错乱堆积在料斗里的空桶经过多段加速输送带的加速作用,把空桶整理为只有一层平铺的没有上下重叠的状态进入到视觉识别区。
视觉识别区
在视觉识别区安装有视觉识别器,用于对空桶输送带输送过来的空桶桶面标签的特定内容进行拍照识别,并将识别出的信息发送至机器人控制系统。
机器人理桶主机
与视觉识别区共用一条用于空桶输送的伺服输送带。机器人理桶主机根据视觉识别器发送过来的位置信息将空桶按照设定的程序正确抓取,并按规定方向放置于成品输送带合适工位,保证空桶桶口朝向一致,再由成品输送系统输送至灌装机入口。
回收机构
回收机构可以把机器人漏抓、不抓或者剔除掉的空桶回收到回收箱中,循环利用,避免空桶的浪费,提高生产效率。
反混桶识别剔除装置
反混桶识别剔除装置由一个检测光电传感器、一个工业视觉识别器以及相应的剔除部件组成。用于对成品输送带上空桶的桶面标签内容进行照相识别,在出现与设定内容不一致时对桶进行剔除,比如桶的方向放反了或正常生产的品种混进了其他品种的桶等,进一步提高设备的防错能力。
成品输送带
由并排运行的2段输送带组成,一段用于放置正面朝上的空桶,另外一段用于放置反面朝上的空桶。每段输送带上根据空桶的尺寸设置有一个个独立的用于放置空桶的工位,输送带由伺服电机驱动,每个工位都有自己的位置信息,2段输送带在机器人理桶主机出口经过合流后再向灌装机入口输送整理后的空桶。
工作原理
视觉识别
经过空桶输送带整理为只有一层平铺的没有上下重叠的空桶进入视觉识别区后,视觉识别器按固定频率对伺服输送带上的空桶进行拍照识别,视觉控制器通过对桶面标签的某些特征区域作为识别对象,识别出该桶的位置、方向和正反面信息(位置X,位置Y,角度,正面or反面),并将这些位置信息发送给机器人控制系统。
机器人理桶主机
机器人理桶主机由并联机器人、空桶输送带以及成品输送带组成,其中空桶输送带、成品输送带均由伺服电机驱动,成品输送带有2条,分布于空桶输送带两侧,一条用于放置正面朝上的空桶,另一条用于放置反面朝上的空桶,2条成品输送带上整理好的空桶经过合流后再输送至灌装机。
在机器人控制程序内将空桶输送带划分出一个抓取区,经过视觉识别区的空桶进入到抓取区后,机器人即根据视觉识别器发送过来的位置信息开始对空桶进行抓取、垂直提升、位置调整,然后利用输送带追踪算法将空桶按设定位置和方向放置于成品输送带上空闲的工位,从而完成整个理桶过程。对于那些已经越过抓取区而还没有被机器人抓取的桶,就认为是没有被识别出来的或者是机器人漏抓的空桶,从而进入到回收机构。
反混桶识别
反混桶识别由于是近距离对桶面标签进行拍照识别,所以选用的视觉识别器的像素不用很高,一般大于或等于30万即可。反混桶识别装置是通过光电检测开关检测是否有桶经过,有桶经过检测开关时会立即触发视觉识别器对桶面标签进行拍照识别。通过选择桶面标签上一个或多个特征标识作为识别对象,如润滑油4L桶桶面标签上的“5W-30”、“API SM”等字样,对这些字样做“与”、“或”或其他关系的运算,通过运算结果判断桶面标签是否正确,不正确则认为桶的方向放反了或混进了其他品种的桶,通过剔除装置进行剔除,避免进入灌装系统。
关键部件及整机性能参数
视觉识别器、并联机器人的主要参数分别见表1、表2,整机性能参数见表3。
经济技术效益
经济效益
通过采用工业视觉和并联机器人技术进行4 L桶的自动上桶,上桶工序的操作人员的数量可以由2个降低为1个,如果按每天2班制计算,上桶工位可以减少2个操作工,并节省15万元/a的用工费用。对于一些低速的灌装线,通过优化设备布局,将自动上桶机的料斗通过面对面的方式布置,1个操作人员可以同时负责2条灌装线的上桶,也能进一步减少用工数量和用工费用,为企业降本增效提供有效的途径。

表1 视觉识别器主要参数
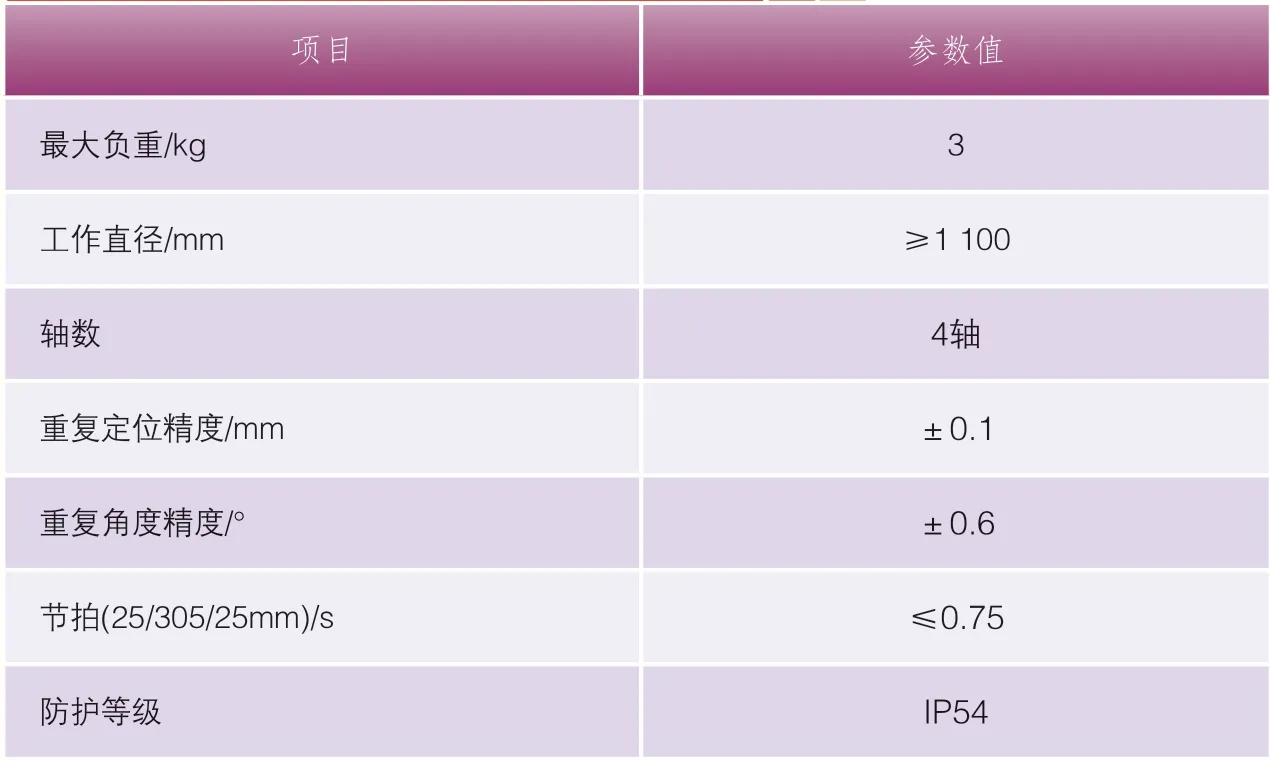
表2 并联机器人主要参数
技术效益
产品切换快
采用工业视觉和并联机器人技术的上桶机,正常的停开机只需要通过停开机按钮即可完成操作,而在需要进行不同规格产品切换时,由于事先都已经将所有产品的参数添加到控制程序里,实际操作时仅需要在触摸屏上选择调用相应的参数即可,无需人工对机械部件进行任何调整,操作简易,切换快速方便,柔性化程度高。
防错能力强
采用工业视觉和并联机器人技术的上桶机采用的是视觉识别器对4 L桶正反面标签的特定区域进行位置、方向和正反面的识别,如果桶身贴了2张标签或标签出现破损时,这类桶就会被识别为异常桶而从异常道排出,不会进入灌装系统。而且在自动上桶机后段的成品输送带还有反混桶视觉识别装置对桶面标签的特定内容作进一步的识别,如果出现反桶、混桶也会被剔除,进一步提高设备的防错能力,保证产品的包装质量。
结束语
采用工业视觉和并联机器人技术进行4 L桶的自动上桶,能有效提高上桶工序的自动化程度,降低用工数量,减少用工费用;提高上桶工序的柔性化程度,实现不同规格产品或同一规格产品不同品种间的快速切换;提高设备的防错能力,保证产品的包装质量。通过优化上料斗布局、优化4 L桶供给形式或采用料斗缺料预警等方式,还可以进一步提高上桶工序的自动化程度,降低劳动力成本,具有很好的应用前景。
