电动汽车电驱动系统动力性匹配设计
2019-05-07陆海斌
高 进,陆海斌
(长安汽车轻型车研发中心,河北 定州 073000)
电动汽车动力特性通常由加速性、爬坡能力、最高车速等性能来评价。驱动电机性能参数设计成为满足整车动力性能首要考虑的问题,而所有驱动电机的这些性能参数都取决于电驱动电机转速-转矩 (功率)特性[1]。本文以某款纯电动物流车进行研究,对其驱动系统匹配选型与验证。
1 整车基本参数及开发目标
1.1 基本参数
整车基本参数见表1。
1.2 开发目标
整车动力性、经济性是衡量电动汽车性能的重要指标,电动汽车设计必须满足其动力性、经济性需求。本次研究以动力性为研究方向,研究车型动力性参数需求见表2。

表1 整车参数

表2 开发目标
2 电机性能需求参数计算
电机系统的选择主要由整车动力性决定,因此所选电机性能参数可根据整车动力性参数进行选择。其匹配过程如下。
2.1 额定功率[1-4]
选择电机功率时,需确保整车可在各种工况下正常运行。功率匹配过程如下。
1)当电动汽车以最高车速运行时所需功率PV:

2)当车辆满载时以规定车速V爬一定坡度的坡时所需功率为Pi:

3)当车辆在水平路面上加速行驶所需功率Pj:

式中:δ——汽车旋转质量换算系数。
选型的驱动电机额定功率应能同时满足以上最高车速、规定车速爬坡、水平路面加速行驶3种情况下的功率需求,即:

2.2 额定转速
为了提高电池利用率,结合车辆用途及经济车速来定义电机额定转速,定义名义转折转速对应的车速为表2中常规车速Ve。

计算得到电机名义转折转速值为6778 r/min。
2.3 最高转速
以最高车速Vmax确定电机最高转速。根据公式:

最高车速对应的电机最高转速9039 r/min,留1.05的安全余量,则电机最大转速为nmax≥9495 r/min。
2.4 额定转矩
电机转矩选择时,额定转矩可根据额定功率进行匹配,最大转矩需满足汽车起步转矩和最大爬坡度要求。
以额定功率/转速确定电机额定转矩Tqe(Nm):

2.5 峰值转矩
2.5.1 以最大爬坡度确定
此时车辆以匀速爬坡行驶,车辆的行驶方程为:

2.5.2 以电机外特性确定
根据电机外特性,额定转速以下为恒转矩区,额定转速以上为恒功率区,由2.3得出,在60 km/h以下为恒转矩区,且0-50 km/h为恒转矩区,当电机以最大转矩输出时,0-50 km/h加速时间最短,则根据表2开发目标0-50 km/h加速时间7 s确定电机最大转矩Tqmax

得出Tqmax2=87.79 Nm≈90 Nm
由上计算得出,Tmax≥max[Tqmax1,Tqmax2], 取190 Nm。
2.6 峰值功率
由0-50 km/h加速时间为7 s计算整车起步最大功率需求,由电机外特性可知,0-50 km/h为恒转矩区,当电机以最大转矩输出时,加速时间最短,则

峰值功率Pmax1=44.48 kW。
由50-80 km/h加速时间为10 s计算整车超车加速最大功率需求,由电机外特性可知,50-60 km/h为恒转矩区,60-80 km/h为恒功率区,则

又对整车进行加速时间分析,由整车运动方程得整车加速时间

1)结合电机外特性曲线,当电机在恒转矩区以峰值转矩Tmax运行时加速时间最短,电机输出至轮边驱动力:

2)当电机在恒功率区以峰值功率Pmax运行时加速时间最短,电机输出至轮边驱动力:

根据表2、公式 (4)可知,0-60 km/h为恒转矩加速,加速时间由公式 (12)、公式 (13)得出:

所以,t0-60=8.069 s。
同理,0-80 km/h加速时间为18 s计算整车最大功率需求Pmax2:
所以,t60-80=t0-80-t0-60=18-8.069=9.931 s。

峰值功率Pmax2=48.55 kW。
由上计算得出,车辆要满足最大爬坡及加速性能需求,电机最大功率要满足:

综上该电动汽车的动力性指标需求见表3。

表3 整车动力需求参数表
3 电机选型
根据表3匹配参数,结合电池包输出特性,选择某公司现有30/60 kW电机。
驱动电机系统参数见表4。

表4 电机选型参数表
1)最大功率及最高转速运行时间为1 min。
2)所选电机应能够在6778 r/min@36.69 Nm工况下运行30 min以上。
3)电机最大扭矩时应能持续运行1 min。
4 整车动力性校核
4.1 1 km最高车速
4.2 30 min最高车速对应扭矩
根据车辆在水平良好路面行驶的行驶方程式,如下:

得到车辆驱动力-行驶阻力数值对应表见表5。
车辆驱动力-阻力平衡图如图1所示。
根据图1行驶力平衡图得到


表5 驱动力-行驶阻力对应表

图1 整车驱动力-阻力平衡图

4.3 最大爬坡度
汽车最大爬坡度决定了汽车的爬坡性能,是指汽车满载时在良好路面上在一定速度下所能达到的最大坡度。对车辆按照最大设计总质量进行爬坡能力仿真,其车速-爬坡度对应表见表6。

表6 车速-爬坡度对应表
爬坡度曲线如图2所示。
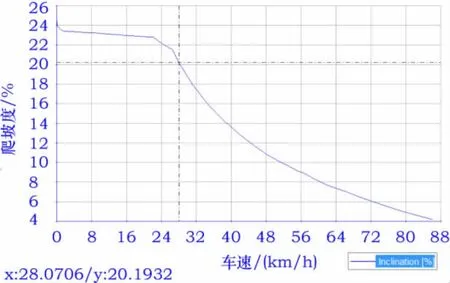
图2 爬坡度曲线
通过分析,满足整车≥20% (28 km/h)的爬坡度需求。
4.4 加速性校核
电机外特性曲线如图3所示。
使用Math-CAD软件对车辆0-50km/h (即:0~5648r/min)加速时间进行分析,该加速过程包含电机从0至额定转速对应车速 (35.4 km/h)和额定转速对应车速至50 km/h两个加速阶段。综合式 (12)、式 (13)、式 (14)得其加速时间为:
对车辆50-80 km/h (即:5648~9038 r/min) 加速时间进行分析,此加速全过程均在恒功率区工作,故其加速时间为:

对车辆0-80 km/h (即:0~9038 r/min) 加速时间进行分析,其加速过程包含恒扭矩区工作和恒功率区工作两个过程。其加速时间为:

4.5 结果分析
仿真结果与实车测试结果对比,其结果见表7。
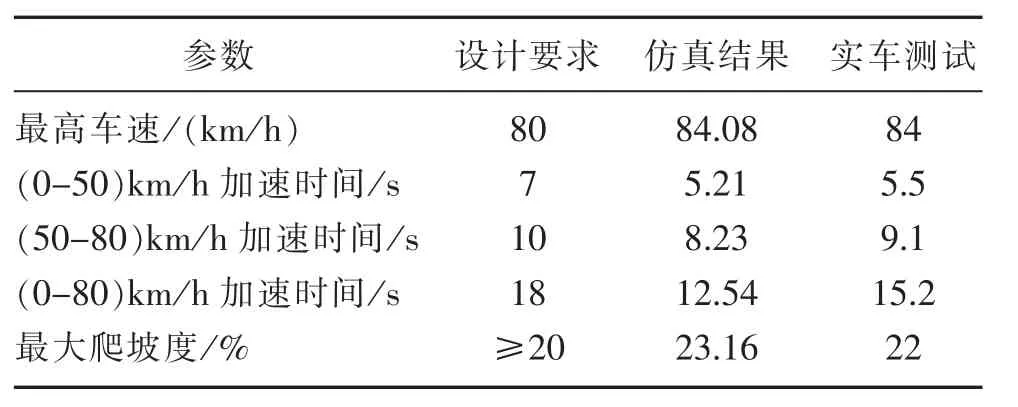
表7 需求-仿真-测试结果对照表
分析该车型动力性能匹配结果,选用的电机系统满足该车动力系统需求,符合设计要求。
5 结论
分析了电动汽车动力性匹配方法,使用Math-CAD进行动力性校核,并经实车测试验证,对结果进行比较,说明该匹配方法选出的动力系统方案已十分接近实车动力性需求,可完全胜任产品开发阶段对电动汽车动力系统进行匹配与选型。
