一种改进的光伏阵列多峰值最大功率点追踪算法
2019-04-10康家玉刘甲琛王素娥
康家玉, 曹 举, 刘甲琛, 王素娥
(1.陕西科技大学 电气与信息工程学院, 陕西 西安 710021; 2.国网西安市长安区供电公司, 陕西 西安 710100)
0 引言
传统化石能源的紧缺及环境问题的恶化使光伏发电的地位愈加重要,但在实际应用中光伏阵列经常因局部阴影遮挡或者局部老化问题导致阵列中一些光伏电池与其他的光伏电池输出特性不一致,出现光伏电池的失配现象,导致光伏阵列的P-V特性曲线呈现多峰特性.光伏阵列的多峰特性会严重影响其最大功率点的跟踪效率,导致光伏阵列的光电转换效率降低.采用传统的单峰最大功率点追踪(Maximum Power Point Tracking,MPPT)方法如电导增量法[1]、扰动观测法[2]、改进的电导增量法[3]、自适应占空比扰动法[4]容易使最大功率点的追踪陷入局部极大值,不能实现光伏阵列的充分利用,故针对此问题研究人员分别提出了一系列改进算法,粒子群优化算法[5-8]能更精确地追踪到全局最大功率点,但这些算法依赖经验,参数选取没有具体依据,并且算法的运算量大;采用的智能算法差分进化算法[9-11]、遗传算法[12,13]、萤火虫算法[14,15]收敛速度快,追踪时间短,但容易使算法不收敛于全局最大功率值并且运算量大、运算复杂.
考虑以上缺点提出一种新型自适应变步长P&O算法.实际工程中光伏阵列的铺设结构和规模一旦确定,其P-V曲线中局部峰值的个数也会随之确定,局部峰值的个数取决于光伏串阴影分布的个数,即光伏串中有几种阴影分布就会出现几个局部峰值,且每个局部峰值所对应的电压处于一定的范围内,以此规律为基础在可能出现峰值点的区域设定电压搜索的小范围,用自适应变步长P&O算法进行小范围追踪,确定一个局部峰值之后跳跃到下一个电压搜索范围的起始点再次进行小范围追踪,比较两次追踪的功率值,保留大功率,舍弃小功率,依次跳跃搜索后最终确定全局最大值.此方法避免了对电压的全局搜索,同时也省去了采用智能算法的复杂过程.本文将以4×1光伏阵列为例进行建模仿真验证算法的实用性和可靠性.
1 光伏阵列多峰功率特性曲线分析
1.1 光伏电池的数学模型
单体光伏电池的数学模型可表示为:
(1)
式(1)中:I为输出电流;V为输出电压;IPH为光生电流;I0为二极管反向饱和电流;q为单位电荷,1.6×10-19C;n为二极管特性因子;k为玻尔兹曼常量,0.86×10-4eV/K;T为电池温度;Rs为光伏电池的串联内阻;Rsh为光伏电池的并联内阻.
通常情况下,Rs远小于二极管正向导通电阻,可令IPH=ISC;Rsh很大,(V+IRs)/Rsh项远远小于电池的光生电流IPH,可省略(V+IRs)/Rsh项.则光伏电池的单指数模型[16]可表示为:
I=ISC[1-C1(eV/C2VOC-1)]
(2)
(3)
1.2 阴影条件下光伏阵列的数学模型
光伏阵列在受到树荫、云层、灰尘等阴影遮挡或者光伏组件发生局部老化时,会使相应部位的光伏电池变成负载吸收功率,形成热斑,从而导致光伏电池的损坏,为解决此问题给光伏组件并联旁路二极管,消除了热斑效应,但会使光伏阵列的输出呈现复杂的多峰特性.

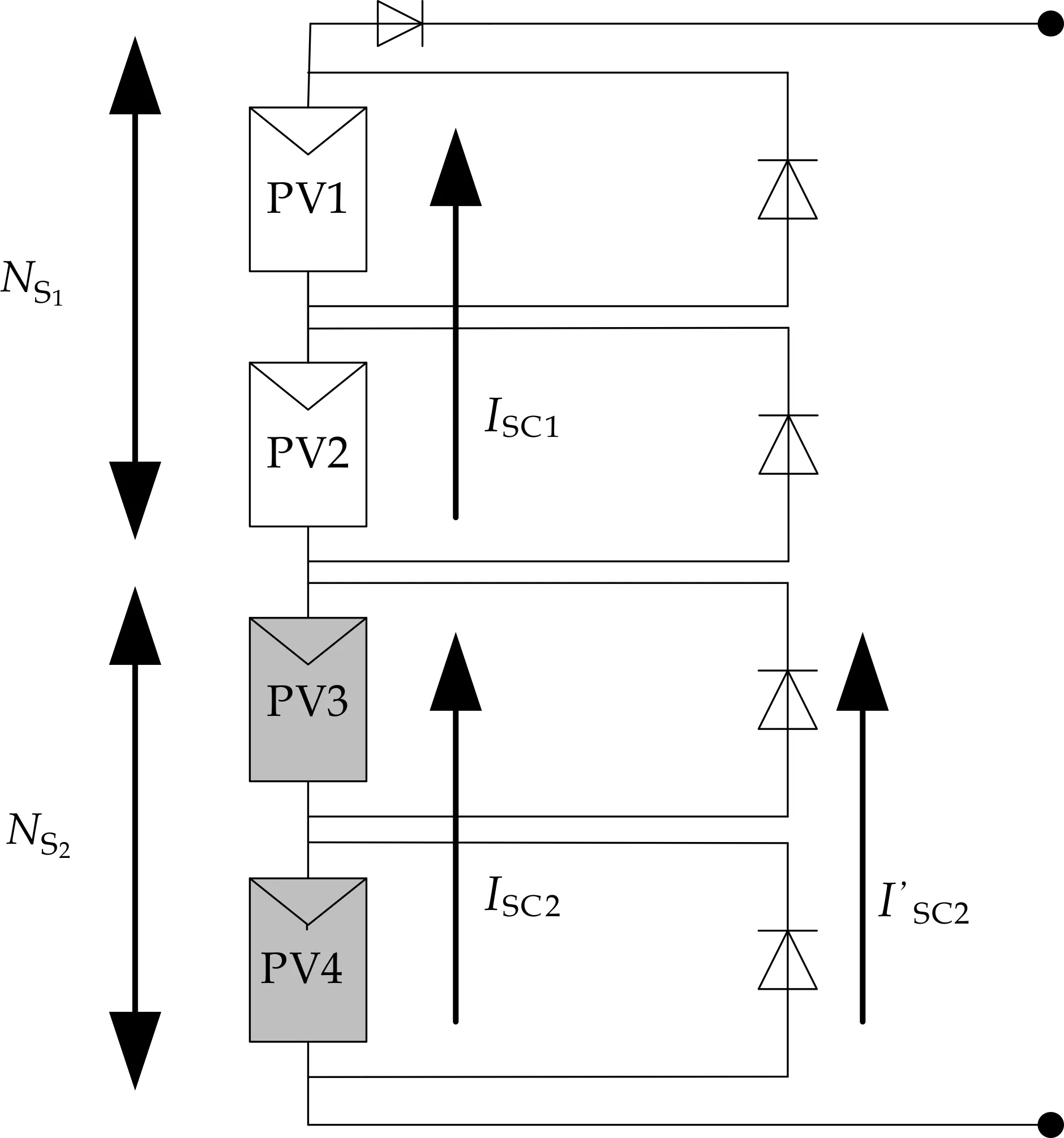
图1 光伏阵列结构
综上所述可以得到光伏串在阴影条件下的数学模型为:
(4)
采用SP(先串后并)结构的任意阴影条件下光伏阵列的数学模型为:
(5)
以图1为例在MATLAB平台建模并仿真.光伏电池采用ASTRONERGY型号为CHSM5408M的电池模板,其标称参数为:UOC=22.2V,ISC=5.45A,Um=17.2V,Im=4.95A.
设置四种不同的光照分布如表1所示.

表1 四种不同的光照分布
仿真得到表1所示光照分布下的四条多峰P-V特性曲线,如图2所示.从图2的四条光伏阵列功率曲线中可以看出,光照分布不同,阵列的P-V曲线呈现的多峰走势不同,其本质区别是光伏串中具有相同光照的光伏组件的个数不同,即光伏串中有几种光照其输出特性曲线就会有几个局部峰值;同时即使局部峰值的个数不同,但局部峰值对应的电压都分布在一个大致固定的范围内.

图2 四种阴影模式下的光伏阵列的P-V曲线
四种阴影模式下局部峰值点对应的电压分布如表2所示.其中,U1、U2、U3即前3个局部峰值点对应的电压的值为组件开路电压Uoc_module的倍数,U4的值即最后一个局部峰值对应的电压的值为阵列开路电压Uoc_array的倍数,具体倍数如表2中括号里数据所示.为了不丢失局部峰值点,需要将表2中括号里所对应的倍数全部涵盖,故设定前(Ni-1)个光伏阵列峰值点所对应的电压搜索范围为k*0.7*Uoc_module~k*0.9*Uoc_module,第Ni个峰值点的电压搜索范围为0.75*Uoc_array~0.95*Uoc_array,在设定的这些小范围内进行局部峰值点的跳跃式追踪,实现阴影遮挡下全局最大功率点的追踪.

表2 四种阴影模式下局部峰值点的电压分布
2 基于光伏阵列峰值点电压分布的新型自适应变步长P&O算法
2.1 传统P&O算法
传统P&O算法控制简单,被测参数少,对传感器的精度要求低,是一种常用的最大功率点跟踪控制算法.首先测量当前时刻光伏阵列的输出电压、输出电流,计算输出功率大小Pn,然后在原光伏阵列输出电压的基础上增加一个小的电压扰动分量,计算此时的输出功率Pn+1,比较扰动前后输出功率的大小,若Pn+1>Pn,继续沿此方向扰动,追踪最大功率点;若Pn+1 图3 P&O算法原理 传统P&O算法存在以下缺点:(1)采用定步长会导致MPP处的功率震荡,引起功率损耗(2)步长大小会影响跟踪的快速性和MPP处的稳态精度.采用自适应变步长P&O算法可以克服以上缺点追踪到最大功率点并且可以避免因峰值点处的震荡而引起的输出功率降低的问题.以ΔP·ΔU作为步长变化的基准,分别判断ΔU、ΔP、ΔP·ΔU的符号,当判别出功率减小时改变扰动方向以大步长靠近MPP,当判别出功率增大时以小步长同方向靠近MPP,随着ΔP的不断减小,对应的步长变化量也在不断地减小,直到ΔP近似达到零,停止扰动.自适应变步长P&O算法的控制流程图如图4所示. 图4 自适应变步长P&O算法的控制流程图 光伏阵列被阴影遮挡时输出曲线会呈现多峰特性,采用单峰值曲线的追踪方法会使追踪陷入局部极值,无法追踪到全局最大功率点.针对该问题提出一种基于光伏阵列峰值点对应电压分布的新型自适应变步长P&O算法,搜索过程如下: 步骤1:令Boost电路中开关管的占空比D为0得到光伏阵列的开路电压UOC_array[17],计算得到开关管的开路电压UOC_module=UOC_array/Ni.为了避免遗漏极值点,第一个极值点对应的电压搜索小范围设定为:0.7UOC_module~0.9UOC_module,第二个极值点对应的电压搜索小范围设定为:2*0.7UOC_module~2*0.9UOC_module,依次类推下去,第Ni-1个极值点对应的电压搜索小范围设定为:(Ni-1)*0.7UOC_module~(Ni-1)*0.9UOC_module,第Ni个极值点对应的电压搜索小范围设定为:0.75UOC_array~0.95UOC_array. 步骤2:在第一个设定的电压搜索小范围内运行自适应变步长P&O算法,搜索出第一个极值点,赋值PMAX=PM1;跳跃到第二个设定的电压搜索范围的起始电压处,在第二个电压搜索的小范围内再一次运行自适应变步长P&O算法,搜索出第二个极值点PM2,比较两个极值点的大小,若PM1>PM2,则PMAX=PM1,若PM1 终止策略:自适应变步长P&O算法在趋近于最大功率点时会因反复扰动造成功率损失,为将其尽快稳定到最大功率点处,减小稳态时功率震荡引起的损耗,故设置终止扰动的条件为:当两次功率之差小于0.05 W时,停止扰动,令最后一次测得的功率为最大值. 算法自然重启条件:光伏阵列的光照强度或工作温度发生变化时,输出功率也会随之发生变化,故稳定运行时,设定自然重启条件为1 min. 突变重启条件:光伏阵列的阴影分布和工作温度受外界影响突变时,输出的最大功率也会发生大的变化,当实时监测功率Preal与最大功率PMAX的差值与PMAX的比值大于0.1时重启算法. (6) 新型自适应变步长P&O算法的控制流程图如图5所示. 图5 新型自适应变步长P&O算法控制流程 阴影条件下光伏阵列的最大功率点追踪是基于前级Boost直流变换器进行控制实现的,本节在 MATLAB/Simulink平台上基于第一节中阴影条件下光伏阵列的数学模型搭建相应的多峰值MPPT控制仿真模型,控制框图如图6所示. 图6 基于Boost的MPPT控制系统 光伏电池的仿真参数UOC=22.2 V,ISC=5.45 A,Um=17.2 V,Im=4.95 A.其Boost电路仿真参数设置为:C1=1 uF;L=500 mH;C2=1 uF;R=200 Ω. 对上文中四种阴影模式下的光伏阵列采用自适应变步长P&O算法进行全局最大功率点追踪的仿真验证. 图7为阴影模式1条件下采用自适应变步长P&O算法追踪全局最大功率点的仿真结果,该算法在0.12 s达到稳态,追踪到的功率值为343 W. 图8为阴影模式2条件下采用自适应变步长P&O算法追踪全局最大功率点的仿真结果,该算法在0.12 s达到稳态,追踪到的功率值为165.3 W. 图9为阴影模式3条件下采用自适应变步长P&O算法追踪全局最大功率点的仿真结果,该算法在0.1 s达到稳态,追踪到的功率值为164.2 W. 图10为阴影模式4条件下采用自适应变步长P&O算法追踪全局最大功率点的仿真结果,该算法在0.15 s达到稳态,追踪到的功率值为76.05 W. 分析总结可知追踪到的四个功率值都是多峰值曲线中第一个出现的峰值点,在阴影模式2,3,4的情况下,追踪到的峰值点并不是全局最大功率点,陷入了第一个局部极值点,光伏电池不能充分利用. 图7 阴影模式1输出功率 图8 阴影模式2输出功率 图9 阴影模式3输出功率 图10 阴影模式4输出功率 分别对上文中四种阴影模式下的光伏阵列采用新型自适应变步长P&O算法进行全局最大功率点追踪的仿真验证. 图11为阴影模式1条件下采用新型自适应变步长P&O算法追踪全局最大功率点的仿真结果,该算法在0.028 s达到稳态,时间缩短了0.092 s,追踪到的功率值为343.00 W. 图11 阴影模式1输出功率 图12为阴影模式2条件下采用新型自适应变步长P&O算法追踪全局最大功率点的仿真结果,该算法在0.020 s达到稳态,时间缩短了0.10 s,追踪到的功率值为170.50 W. 图12 阴影模式2输出功率 图13为阴影模式3条件下采用新型自适应变步长P&O算法追踪全局最大功率点的仿真结果,该算法在0.048 s达到稳态,时间缩短了0.052 s,追踪到的功率值为164.20 W. 图13 阴影模式3输出功率 图14为阴影模式4条件下采用新型自适应变步长P&O算法追踪全局最大功率点的仿真结果,该算法在0.046 s达到稳态,时间缩短了0.104 s,追踪到的功率值为107.12 W. 分析总结可知追踪到的四个功率值都是多峰值曲线中最大的峰值点,该算法解决了陷入局部极值点的问题,且追踪时间减小,追踪速度提高,增大了光伏电池的利用率. 图14 阴影模式4输出功率 本文提出的新型自适应变步长P&O算法,以阴影条件下光伏阵列输出特性曲线的峰值电压分布规律为基础,跳跃式地依次追踪每一个局部峰值,比较后保留较大值,实现了阴影遮挡下光伏阵列的全局最大功率点追踪.该算法可用于中小规模阴影条件下光伏阵列的最大功率点追踪,也可用于特大规模光伏阵列分布式最大功率点追踪(Distributed Maximum Power Point Tracking,DMPPT)的子模块.仿真结果表明本文提出的新型自适应变步长P&O算法在各种阴影分布情况下不会陷入局部极值点,在最大功率点的追踪过程具有较高的追踪速度和精度,提高了光伏系统的利用效率,减少了资源消耗.
2.2 自适应变步长P&O算法

2.3 新型自适应变步长P&O算法

3 Simulink仿真分析

3.1 自适应变步长P&O算法仿真




3.2 新型自适应变步长P&O算法仿真




4 结论
