电磁轨道发射系统电枢膛内速度实时检测方法研究
2019-01-07,,,,
, ,, ,
(1.中国电子科技集团公司 第二十七研究所,郑州 450047;2.华中科技大学 强电磁工程与新技术国家重点实验室,武汉 430074)
0 引言
电枢出口速度的稳定性是电磁轨道发射系统的关键性能指标[1]。电磁发射试验过程中对电枢进行实时速度检测并实施反馈控制是提高这一关键指标的有效方法[2]。对电枢运动速度实施反馈的前提是对电枢的膛内运动速度进行实时准确测量[3]。
从20世纪60年代起,B探针在等离子体内部磁场测量等大电流设备中得到广泛应用。1986年,Bauer等在电磁发射实验中将测得的B探针信号表示成位移有关的常微分方程,结合电流波形测得了连续的电枢位置和速度[4]。目前对电枢在膛内的运动速度的测量方法一般采用在发射器中预埋B探针,利用模数转换芯片对B探针的感应电压波形进行采样,通过算数运算计算出电枢经过B探针的时刻,最后计算出电枢的速度[5]。这种方法必须得到电枢膛内运动的全部有效信息后,才能通过数字信号分析处理得出电枢的运动速度,不是对电枢速度的实时检测,不能满足电枢速度闭环控制的需求[6]。
本文采用差分式B探针作为电枢在发射器膛内运动速度检测的传感器,运用运算放大器、电压比较器以及门电路组成实时检测模块和脉宽比较模块,提取电枢经过B探针的时刻并实时判断电枢速度是否达到所设定的阈值。整个处理过程延时不超过2微秒,可实现对电枢运动速度的实时检测,可作为电磁轨道发射电枢速度反馈控制决策的依据。
1 差分B探针工作原理
B探针是由缠绕在绝缘材质骨架上的铜漆包线支撑,是较小的导体环线圈。线圈和支撑杆组成一个B探针装置。由于被测磁场变化,该线圈内的磁通会产生变化,从而产生感应电动势,即该感应电压与通过线圈的磁通变化率成正比[7-8]。B探针根据法拉第电磁感应原理工作,磁场随电枢运动而向前扩展,变化的磁场在B探针中感应出变化信号,因此B探针信号的变化特征能够反映出电枢的位置。其感应电压[9]遵循式(1)所示:
(1)
其中:V是线圈两端感应电动势,Ф是通过线圈的磁通,A是线圈的面积,n是线圈的匝数。其原理如图1所示。

图1 B探针的工作原理图
差分磁探针组件包括印制板骨架和差分磁探针,如图2所示。每一个差分磁探针包括两个磁探针和印制板骨架,印制板骨架分为若干布线层,通过印制板印刷工艺在多个布线层上绕制两个多匝线圈,而且两个磁探针的绕线方向相反。
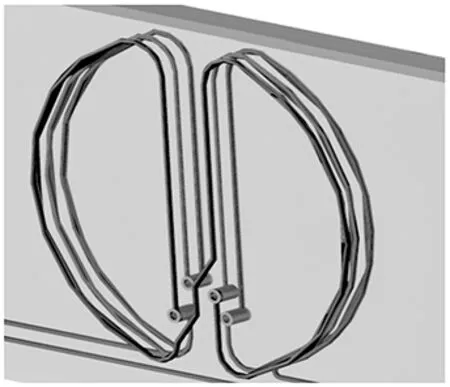
图2 单个差分磁探针组件组成图
将差分探针水平安装在电磁炮导轨面正上方,如图3所示。当电枢经过差分探针的几何中心时对应的感应电压过零,以此作为电枢到达该位置的标志,通过间距已知的一组差分探针来确定电枢的速度。这种差分探针的方法可以有效排除电磁干扰等对输出波形的影响,得到良好的波形,从而达到良好的测速效果,可用于单轨或多轨增强型电磁轨道炮。
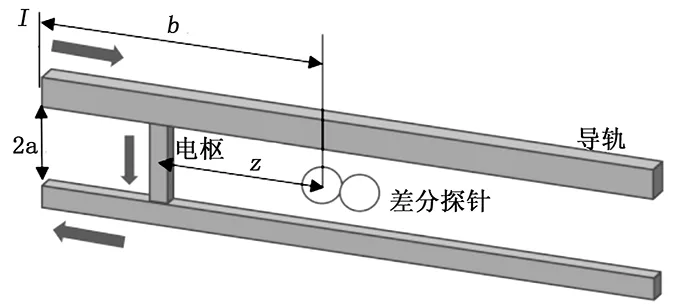
图3 差分式B探针在轨道炮的安装位置
在电枢移动的过程中,假设电枢速度相对于差分探针两个线圈的值很大,感应过程中的电流视为恒定值,则轨道的电流和电枢的电流由于电枢位置的变动都会在两个线圈内产生磁通的变化,进而感应出电压[10],将两个线圈的电压反向串联并输出到示波器,得到差分电压的波形。通过理论推导及仿真分析得到差分探针感应电压波形如图4所示。
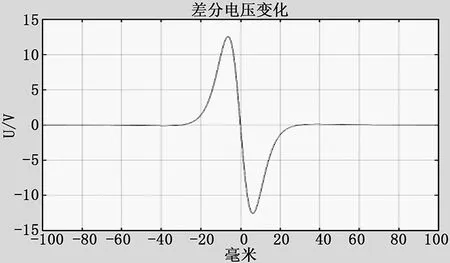
图4 差分探针感应电压波形图
图4中的x轴表示电枢位置,y轴表示电枢经过该探针时的感应差分电压。在x=0位置,即电枢经过差分探针两个线圈的物理中心点时,y轴差分电压值为0。可以检测上升沿过零点和最大值至最小值过零点两种方法来判断电枢是否经过探针,本文为了能够快速检测并反馈电枢状态,采用检测上升沿过零点来判断电枢是否经过该探针位置。因此检测输出电压从过零点到最大值,这个过零点时刻即为电枢经过探针时刻。沿着轨道面上方隔一定距离布置一系列的差分探针时,就可以得到电枢运动速度并得到其速度变化情况。通过差分方法消除了干扰磁场信号,使得信号的特征点更为清晰和明确,解决了发射器膛内速度测量精度差、特征点不明显等问题。
2 膛内速度实时检测系统设计
膛内速度实时检测系统由序列差分式B探针线圈、实时检测模块以及脉宽比较模块三部分构成,组成示意图如图5所示。
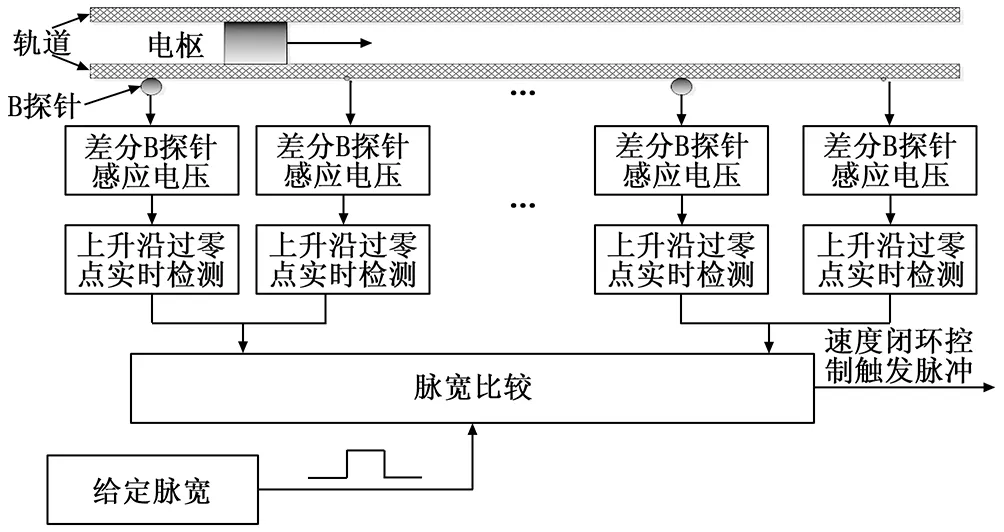
图5 膛内速度实时检测系统组成图
差分式B探针线圈放置于电磁轨道发射器的预留位置,当电枢到达该线圈所在位置时,线圈上感生出电压信号通过屏蔽线传输到上升沿过零点实时检测模块;上升沿过零点实时检测模块对线圈感应电压波形进行放大、变换、压缩后输入到脉宽比较电路;脉宽比较电路将两路B探针之间的时间差与设定的时间进行比较,如果B探针时间差小于设定时间,则输出触发脉冲。
2.1 序列差分式磁探针线圈设计
序列差分式磁探针线圈放置于发射器预留位置,该位置相距一般为0.1~0.2 m,位置示意如图5所示。B探针长度可根据发射器进行调整,原则上尽可能接近发射器中心位置。探针插入发射器的测量孔内,其底座部分通过BNC连接器与发射器固连,避免发射器冲击振动对设备造成影响。B探针线圈由漆包线绕制而成,线圈接头通过双绞线的方式引入骨架内孔,并经由套管内的细孔连结至接线端子,线圈骨架及套管采用绝缘性能良好的四氟材料。
电磁发射过程中的电磁场很强,所以B探针线圈可以做到很小。在线圈设计中,应尽量减小线圈的尺寸,以减小对发射器结构强度造成的影响。为了正确测试变化的磁场,B探针线圈设计应该从以下4个方面的因素进行综合考虑:
1)B探针的分布密度直接影响了速度变化曲线的精度。由于B探针采用位移与时间的比值测得平均速度,所以B探针的密度越高,速度测量的精度越好;
2)B探针信号采集设备采样速率越高,对峰值时刻或过零点时刻采样的准确度越高,计算所得的速度值误差越小;
3)B探针尺寸要尽量小,使其空间分辨率更高,同时不影响发射器结构强度;
4)B探针灵敏度要足够高,即要求线圈匝数多,线圈截面积大,从而速度曲线的波峰越陡,以利于快速检测。
2.2 实时检测模块
本文采用B探针感应电压的上升沿过零点实时检测,包括两级信号放大电路、波形变换电路和脉宽压缩电路。
2.2.1 两级信号放大电路
信号放大电路将B探针感应到的信号幅值进行放大,根据前端B探针感应幅值及后端处理电路输入来确定放大倍数,本文采用两级放大,由放大器A1和A2组成,放大器采用低噪声快速运放THS4551,THS4551是美国德州仪器公司的新型快速放大器,具有低失真、高斜率、低噪声和超过2 GHz的增益带宽积。该电路的放大倍数由(R3/R2)×(R6/R5)决定,本文采用放大倍数k=10。两级信号放大电路如图6所示,第一运算放大器A1对差分B探针感应电压Vin进行反向比例放大。第二运算放大器处于饱和放大状态,第二运算放大器的输出信号为F2。
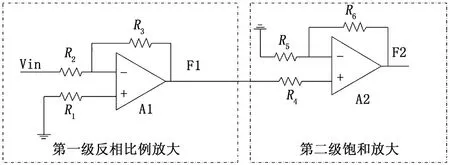
图6 两级信号放大电路
2.2.2 波形变换电路
波形变换电路通过比较器将正弦波变换为脉冲信号,以便后续电路准确检测波形上升沿。波形变换电路如图7所示。第一级变换电路为负电压比较电路,由比较器L1和反向器N1组成。比较器采用LM311,该比较器是一款灵活性较高的电压比较器,能工作于5 V到30 V的宽电压范围,此灵活性使之可以驱动DTL、RTL、TTL或CMOS等逻辑电路。比较器L1的反相输入端为图6放大器A2的输出F2,L1的同相输入端为负比较电压,本文取-1.5 V;L1的输出信号接反相器N1,N1的输出信号为F2-PFPY。第二级变换电路为正电压比较电路,由比较器L2和反向器N2组成。比较器L2的正相输入端为图6放大器A2的输出F2,L2的反相输入端为正比较电压,本文取1.5 V;L2的输出信号接反相器N2,N2的输出信号为F2+PFPY。比较器L2的输出F2+P预留到下一步脉宽压缩电路使用。
此模块分别输出两个方波F2+PFPY和F2-PFPY。F2+PFPY在差分B探针信号小于1.5 V时为高电平,在差分B探针信号大于1.5 V时为低电平。F2-PFPY在差分B探针信号大于-1.5 V时为高电平,在差分B探针信号小于-1.5 V时为低电平。
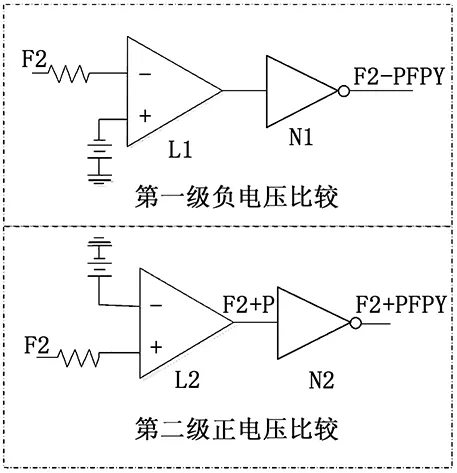
图7 波形变换电路
2.2.3 脉宽压缩电路
脉宽压缩电路将波形变换电路所得到的脉冲信号进一步压缩,以免后续脉宽比较模块的输入出现重叠波形的情况。脉宽压缩电路如图8所示,由RS触发器R1和异或门电路XOR1组成。RS触发器采用三态RS触发器集成电路CD4044B,该电路在使能状态下,低电平触发有效。F2+PFPY与F2-PFPY分别作为R1的S端和R端的输入信号,R1的输出为F2PULSE。F2PULSE在差分B探针电压小于0时为高电平,在差分B探针电压大于0时为低电平。
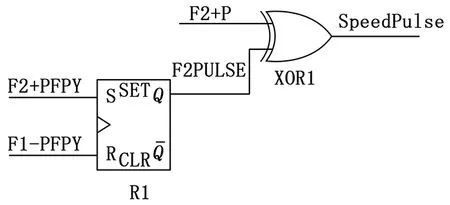
图8 脉宽压缩电路
异或门XOR1的两个输入信号分别为F2+P、F2PULSE,F2+P在差分B探针感应电压小于零时为高电平,在差分B探针电压大于零时为低电平。异或门XOR1的输出为Speedpulse。差分B探针电压大于零而小于1.5 V/10时Speedpulse为高电平,其他时刻Speedpulse为零。Speedpulse的上升沿时刻与差分B探针的上升沿过零点时刻相同,1.5 V/10越小,Speedpulse的脉冲宽度越小。
2.3 脉宽比较电路
在两路差分B探针距离一定的情况下,速度与电枢通过两路探针的时间差呈反比。假设弹丸达到速度阈值时,弹丸经过两路探针的时间差为Δt0,如果弹丸经过两路探针的时间差t大于Δt0,则速度小于阈值;如果弹丸经过两路探针的时间差t小于Δt0,则速度大于阈值。
脉宽比较电路图如图9所示,由或门OR1、计数器JS、异或门XOR2和与门AND1组成。计数器JS采用CD74HCT4020,该计数器是14态脉冲计数器,能够快速灵活地对脉冲信号进行计数。脉宽比较电路的处理逻辑为假设两路差分B探针上升沿过零点检测模块的输出信号分别为脉冲A,脉冲B。脉冲A,脉冲B分别为或门OR1的输入信号,OR1的输出信号为脉冲C,脉冲C的前后两个上升沿分别与脉冲A和脉冲B的上升沿时刻一致。脉冲C为二进制计数器JS的输入,JS会在脉冲的上升沿时刻发生状态翻转,则二进制计数器的输出脉冲E的脉宽为弹丸经过两路差分B探针的时间差。
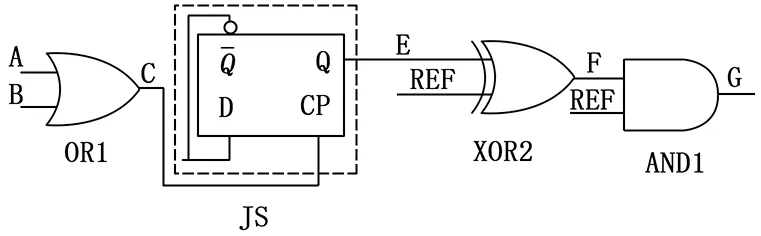
图9 脉宽比较电路图
标准脉冲REF的脉宽为Δt0,脉冲E与标准脉冲REF作为异或门XOR2的输入信号,XOR2的输出信号为脉冲F,F与REF作为与门AND1的输入信号,AND1的输出为信号G。
当脉冲E的脉宽比脉冲REF的脉宽大时,信号G会一直维持低电平状态,代表弹丸运行速度没有超过阈值,时序如图10所示。
当脉冲E的脉宽比脉冲REF的脉宽小时,信号G会在t2时刻输出一个上升沿脉冲,代表弹丸运行速度已经超过阈值。第二与门AND2的输出信号G可作为反馈环节的触发信号,时序如图11所示。
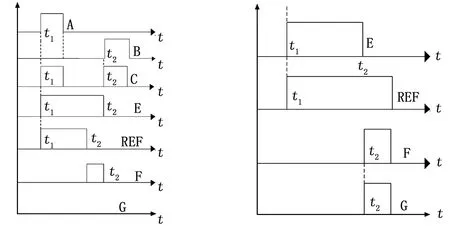
图10 电枢速度未达到设定值时序图 图11 电枢速度达到设定值时序图
2.4 延迟时间分析
由上述可知,整个处理电路由2级放大电路、1级比较电路、1级反向门电路、1级RS触发电路、2级异或门电路、1级或门电路、1级计数器电路和1级与门电路组成。各种门电路的典型延迟时间如表1所示。可知整个处理电路的延迟时间为1.149 s。假设电枢速度为2000 m/s,那么在反馈延迟时间内电枢仅行进了2.3 mm,满足实时控制的要求。
3 实验结果
按照本文图5搭建实验系统,采用4通道泰克示波器MSO3034采集各个节点波形,实验结果如图12~14所示。

表1 门电路典型延迟时间
图12中,CH1为差分式B探针原始感应电压波形,波形接近于正弦波,幅值为1.2 V;CH2是经过放大电路的B探针感应电压波形,幅值为12 V;CH3为波形变换电路输出波形,通过比较器将正弦波变换为矩形波脉冲;CH4为脉宽压缩电路输出波形,进一步压缩波形以避免脉冲重叠现象发生。从图中可以看出,所设计的电路能够有效进行上升沿过零实时检测。
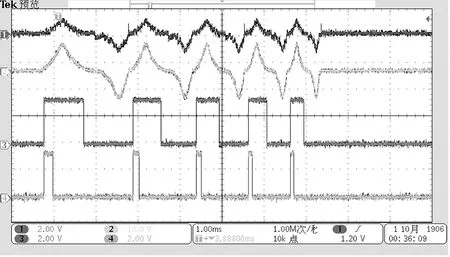
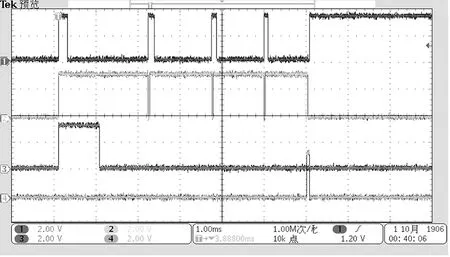
图13 波形比较电路输出波形图
图12 放大电路/波形变换/脉宽压缩电路输出波形图
图13中,CH1为脉宽压缩电路输出波形,对应图11中的波形C,即序列B探针感应电压的过零点时刻脉冲;CH2为脉宽比较电路JS计数器的输出,对应图11和图12中的波形E,即相邻两个B探针过零点时刻差值;CH3为输入参考脉宽,对应图11和图12中的波形REF,可根据速度控制情况自行设定;CH4为输出触发电路,对应图12中的波形G,该输出可作为速度实时控制电路的输入。该结果表明所设计的电路能够实时检测速度并输出触发脉冲给控制电路。
图14中,CH1为差分式B探针原始感应电压波形,CH2为输出触发波形。经过放大,可以看出B探针原始波形的过零点到输出触发波形的上升沿之间时间差,即延迟时间差为1.14 μs,与计算值相一致。
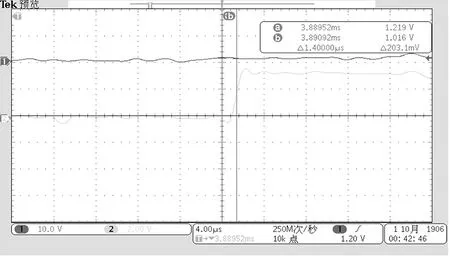
图14 延迟时间波形图
4 结论
1)分析了序列差分式B探针工作原理并给出了初步设计。这种差分探针的方法可以有效排除电磁干扰等对输出波形的影响,得到良好的波形,从而达到良好的测速效果,可用于单轨或多轨增强型电磁轨道发射装置。
2)采用运算放大器、电压比较器、门电路构成的实时检测模块和脉宽比较模块来检测电枢的运动速度并判断是否达到所设定的阈值,延迟时间不超过2 μs。
3)本文采用的过零点实时检测模块的输出脉冲为窄脉冲,且脉宽可调,即使多个B探针密集布置,也不会发生输出脉冲重叠的情况,有利于对弹丸在膛内的运动过程进行多点连续监控。
4)本文采取较多的模拟电路实现了电枢运动速度的实时检测。为了提高整体电路的扩展性,后续考虑在保证延迟时间的基础上,采用以FPGA为核心的可编程硬件电路来实现电磁轨道发射系统电枢膛内运动速度的实时检测。
