地空导弹垂直发射高精度初始姿态获取技术研究
2018-10-26刘伟鹏袁杰波赵文龙
刘伟鹏,袁杰波,秦 峰,吴 镇,赵文龙
(上海机电工程研究所,上海,201109)
0 引 言
垂直发射技术于上世纪80年代趋于成熟,该技术的优点是:反应快,发射率高;全方位发射,无死角;贮弹量大,火力强;结构简单,工作可靠,生存能力强;有利于通用化和模块化;成本低,全寿命周期费用少[1-2]。目前,垂直发射为地空导弹普遍采用的发射方式。
高精度的捷联惯导解算是导弹顺利进行中末制导交班的基础,惯导解算误差一般由初始对准误差、惯性器件误差以及算法误差等因素决定,其中初始对准误差又是所有因素中影响最大的[3],提高初始对准精度一直是导弹导航系统研究发展的重要方向。初始对准误差即初始姿态误差,包括俯仰角误差、滚转角误差和方位角误差,其中俯仰角、滚转角自对准时间短(10 s)且精度由惯性器件中的加表零位决定,误差较小;方位角自对准时间长(5 min)且精度由陀螺漂移决定[4]。
目前国内外战略导弹、弹道导弹等对方位角有很高的要求,其方位角一般采用自对准[4],而射程较近的战术导弹发射准备时间较短且陀螺漂移(1°)较大,其方位角一般由发控直接装订。由以往型号的实测数据及文献[1]可知,此时方位角误差较大无法保证精度。针对该问题,本文对发控装订方位角自对准的误差链进行了分析,考虑将方位装订中的合成滚动方向误差转化为合成偏航方向误差以获取高精度初始方位,在不影响导弹准备流程的前提下,设计了一种垂直发射条件下利用导弹起竖过程两次自对准获取高精度初始姿态的方法,并通过模拟真实的发射条件进行了半实物仿真试验验证。
1 发控装订方位角自对准误差链分析
地空导弹垂直发射时,由于导弹发射准备时间较短且惯性器件误差较大,其初始对准一般以“水平自对准+方位装订”的形式完成,即需要由车载定位定向设备给导弹提供方位角。发控直接把车载定位定向设备测得的方位角装订给箱弹进行自对准的过程中,由于测量误差、导弹滚转方向安装误差等误差因素的存在,使得装订的方位角误差较大且无法消除。由以往型号的实测数据可知最大可达1.5°,对于近程导弹该误差项影响不大,但中远程导弹一般要求导弹初始姿态误差在0.5°以内,此时1.5°的方位误差会极大增加导弹中末制导交班的难度。
方位角从定位定向设备传递到弹上惯导会有一系列的安装误差,其误差链路如图1所示。

图1 导弹装订方位角误差链路Fig.1 The error link of initial azimuth setting
对于垂直发射导弹,目前通常在导弹起竖沉降完毕后开始自对准,此时其装订方位角的基线为导弹的滚动方向,即导弹的径向(Z1a轴),即要使导弹的Z轴与定位定向设备的方位角一致,定义为合成滚动方向。定位定向设备一般采用高精度的组合导航设备,其方位精度在0.05°以内,其与发射车的安装误差一般经过标定可以保证方位误差在0.1°以内,惯测组合安装于弹内且惯性测量器件自身的滚转安装误差可由加工精度保证,合成在0.1°以内,故图1中的1、5、6三项误差源的影响不大。但是垂直状态下导弹安装于发射筒的滚动安装误差、发射架和发射筒的滚转方向安装误差,即图1中的2、3、4三项误差源,统称为合成滚动方向误差,由于基线太短(一般不超过400 mm),其精度得不到保证,对初始姿态的影响很大。
某地空型号按图2所示布局,使用经纬仪对试验过程中导弹方位角装订精度进行了多次评估验证,验证结果如表1所示。

图2 导弹方位角误差标定原理图Fig.2 The schematic diagram for calibration of the missile azimuth error

表1 联合标定数据记录Tab.1 The data record of united calibration
表1中发射系统的方位角误差定义为:定位定向设备的工作轴线与起竖到90°并下放到位的发射筒导轨工作面的法向之间的夹角(含定位定向导航设备自身的定向误差)。从表1中可以看出定位定向设备到发射筒的安装误差可以导致装订方位角的误差接近1.5°,这主要由发射架﹑发射筒的滚转安装误差引起。若再考虑导弹与发射筒的滚动方向安装误差,装订方位角的误差可能会更大,故合成滚动方向误差会极大影响导弹捷联惯导解算的精度,进而影响导弹中末制导交班。
2 导弹起竖两次对准方法
2.1 导弹起竖两次对准原理
从第一章的分析可知:垂直发射时由于装订方位角的基线沿导弹径向,其长度与导弹直径一致(一般不超过400 mm),误差较大(1~1.5°)。但通过以前的型号试验数据可知,在加工精度一致的情况下,装订方位角误差与基线长度成反比。导弹水平状态进行自对准时,其装订方位角的基线方向沿导弹纵轴(X轴)。由于全弹的长度一般大于4 000 mm,远大于垂直状态基线长度,此时发射架沿弹长方向与定位定向设备的方位一致(0.05°以内),发射架沿弹长方向与发射筒的轴向一致(0.05°以内),弹的轴向和发射筒的轴向一致(0.05°以内),该精度可以通过加工和安装保证,即水平状态下图1中的2、3、4三项误差源(统称为合成偏航方向误差)的精度均可以得到保证。此时方位装订误差远小于垂直状态方位装订误差(0.2°以内),即水平状态下的合成偏航方向误差远小于垂直状态下的合成滚动方向误差。
导弹从水平状态起竖沉降完毕成垂直状态的总时间一般为2 min,由以往的型号试验数据分析可知,以目前地空导弹所用的惯测组合精度和惯导解算算法精度,2 min的捷联惯导解算带来的相对初始姿态的误差在0.1°以内。
由上述分析可知,导弹水平状态装订方位角,然后惯导解算2 min,整个过程带来的方位角误差在0.3°以内。故可以考虑垂直发射时将方位装订中的合成滚动方向误差转化为合成偏航方向误差以获取高精度初始方位。具体方法如下:在导弹水平状态时,由定位定向设备装订方位角,进行第一次自对准,以较高精度的初始方位得到较高精度的初始姿态角;随后导弹按照发射流程开始起竖沉降,起竖沉降过程中实时惯导解算获取导弹当前姿态阵,直至沉降完毕导弹保持垂直静止状态,对垂直静止状态下的捷联惯导解算姿态阵进行坐标映射转换为水平状态下的姿态阵,用坐标映射后的姿态阵可解算出导弹垂直发射的装订方位角;最后根据此方位角进行垂直发射状态下的第二次自对准,获得初始滚转角和俯仰角即可。整个导弹起竖过程两次对准获取高精度初始姿态实现流程如图3所示。

图3 导弹起竖两次对准实现流程图Fig.3 The flow chart for twice alignment in missile erection
2.2 导弹起竖对准模型
2.2.1 水平对准回路
两次自对准过程中导弹两个独立的水平回路自对准算法一样,均先进行解析粗对准,精对准采用常用的状态观测器对系统状态进行重构对准[5]。
以北向加速度计和东向陀螺仪组成的水平回路为例,取状态变量X = [δVNE]T,速度误差量δVN作为观测量,则有

式中:g为重力加速度,Ω为地球自转角速度,R为地球半径,L为纬度,εE为东向陀螺漂移,▽N为北向加速度计零位。考虑控制项,并以EE=εE+DΩcosL表示,则状态方程和观测方程为


式中:N=[n1 n2]T为观测器增益,用极点配置法[5]可以确定参数n1,n2,由观测器重构的状态实现控制律,则闭环系统的观测器方程为

2.2.2 方位对准回路
第一次水平状态下的自对准方位由定位定向设备直接装订。由于垂直状态下直接用姿态阵求取方位角会因为三角函数奇异而得不到正确值,故第二次垂直状态下的自对准,待导弹沉降静止后,记录捷联惯导解算得到的当前导航系到弹体系的姿态阵,按Z1a→X1a,Y1a→Z1a,X1a→Y1a(箭头左为映射前坐标轴,箭头右为映射后坐标轴)的顺序进行惯测敏感轴映射,则映射后的水平状态导弹姿态阵为
3 仿真分析
为了准确评估导弹起竖两次自对准方法的精度,采用某型号实物惯测进行了半实物仿真试验,试验系统组成如图4所示。
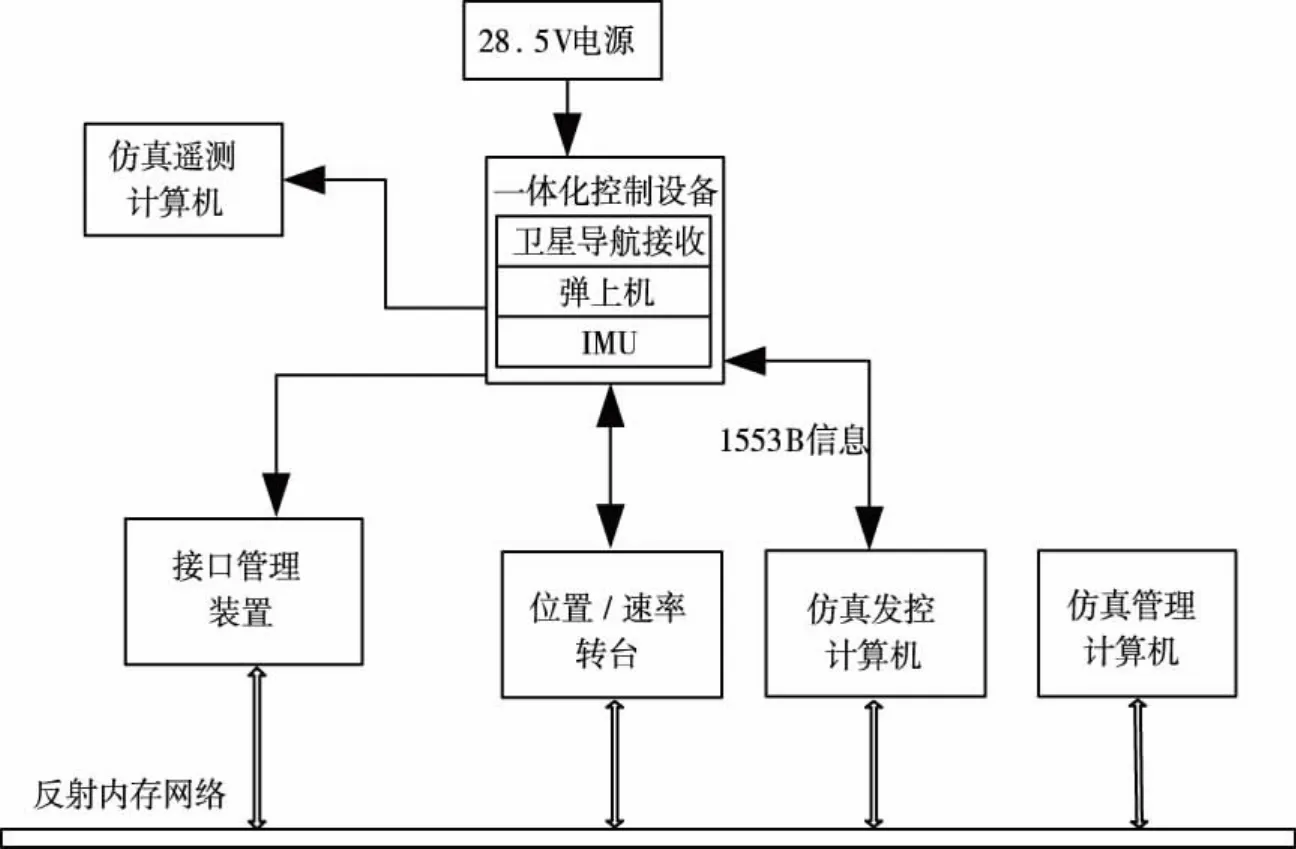
图4 起竖两次自对准试验系统组成图Fig.4 The diagram for twice alignment test system
试验条件为:转台模拟导弹起竖时间和沉降时间均为1 min,模拟发控装订方位角误差视为符合正态分布的误差过程,水平状态时装订方位角误差为均值0°、标准差0.1°的正态分布,即最大不超过0.3°;垂直状态时装订方位角误差为均值0°、标准差为0.5°的正态分布模型,即最大不超过1.5°。所用实物惯测指标为:陀螺零偏为1(°)/h,加速度计零位为5×10-4g。采用同一条200 km的某典型弹道分别用两种对准方式进行了10次全弹道半实物仿真,仿真结果见图5和表2~3。
从图5可以看出,两个水平失准角在10 s内均可收敛到理想精度。从表2~3可以看出,起竖两次自对准获取姿态技术可以很好地消除合成滚转误差对装订方位角的影响,使得垂直发射初始方位角的精度由1.2°提高到0.3°以内,中末制导交班时刻导航位置误差由800 m提高到100 m,有效提高捷联惯导解算的精度。
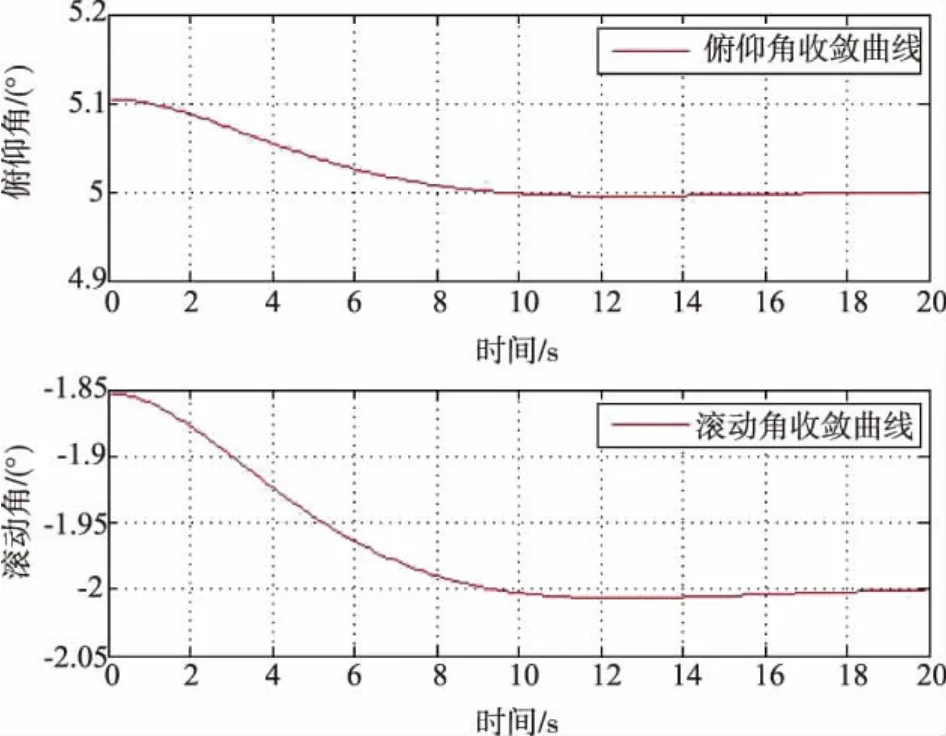
图5 精对准两个水平失准角估计曲线Fig.5 The estimated curves of two level misalignment angles of fine alignment

表2 两种对准方式10次仿真发射时刻方位角误差统计Tab.2 The azimuth error statistic of ten simulation launch moment for two alignment methods

表3 某典型弹道两种对准方式中末制导交班时刻导航误差统计Tab.3 The navigation error statistic of midcourse/terminal guidance handover moment for two alignment methods of one typical trajectory
4 结束语
本文结合工程实际提出了一种新的垂直发射高精度初始姿态获取技术。该技术的特点是合理利用导弹发射流程中的起竖过程进行两次自对准,将方位装订中的合成滚动方向误差转化为合成偏航方向误差,在满足武器系统准备时间的前提下使得发控装订方位角误差由1.5°减小到0.3°以内,有效提升了地空导弹初始姿态的精度,保证导弹飞行过程中高精度惯导解算。仿真试验表明,导弹起竖两次对准方法在不影响导弹准备流程的前提下,可以有效提高方位角精度,为实现地空导弹高精度自对准提供了参考依据,具有较高的工程应用价值。后续可进一步研究水平状态下方位角标定方法,在实际飞行试验中使用验证两次对准方法的姿态精度。
