一种战场局部环境超宽带定位技术研究
2018-10-26何亚,毛勇
何 亚,毛 勇
(江南机电设计研究所,贵州 贵阳,550006)
0 引 言
现代化战争是信息无人化战争,战场信息化已成为未来战场的发展趋势。战场信息化是战场指挥控制、智能交战的应用需求,而信息化战场的重要保障是定位技术[1-3]。目前运用于战场环境的定位技术主要是GPS定位技术、北斗定位技术、惯性导航定位技术以及无线网络定位技术等[4-6]。其中GPS定位技术和北斗定位技术适用于环境条件良好的情况,对于复杂恶劣的战争局部环境难以实现精准定位,而惯性导航可以定位到目标点的绝对坐标位置,但是要求每一个目标点携带或安装惯性导航定位装置,且惯性导航成本较高,其它无线网络定位技术则比较容易受到电磁干扰[7]。超宽带(UWB,Ultra Wide Band)定位技术和传统定位技术相比,具有抗噪声能力强、多径分辨力高、可以穿透等优点,在无线定位应用上具有很大的优势[8]。利用UWB信号进行定位,精度在理论上可以达厘米级,完全能够满足精准定位的需求[9-10]。超宽带由于功率的限制,可以重复利用已经分配的频段,不会影响现存的各种无线系统,且超宽带信号还具有极强的穿透能力,可以在室内和地下进行精确定位。因此对于战场上GPS、北斗定位系统等无法定位或应用的局部环境,UWB能够进行补充定位。对于超宽带信号受到遮挡时或目标节点超出宽带有效定位区域时,超宽带定位误差会急剧增大,此时可以通过移动基站使得基站定位范围动态变化,从而改善超宽带定位环境,获得较为精准的定位结果[11]。
本文根据战场环境复杂多变的特征,采用UWB基于信号到达时间定位(TOA)的定位方式,构建战场局部环境UWB定位系统;采用三维全质心算法获取TOA定位方式的唯一解,从而获得定位目标节点的三维坐标值[10];采用二次计算的方法提升定位精度。为验证其定位方法的可行性和三维全质心算法的准确性,进行数值仿真试验,经过仿真分析,验证战场局部环境UWB定位技术的可行性和三维全质心算法的准确性,旨在为战场局部环境定位技术提供可行的方法。
1 战场局部环境UWB定位技术方法
1.1 构建战争局部环境定位系统
战争环境一般都比较复杂,存在许多遮挡物,或者存在烟雾覆盖等,因此在作战环境内很难接收到GPS或者北斗等卫星定位信号,不能对作战士兵或作战设备进行精确定位和跟踪。本文提出采用UWB定位的方法对作战环境中的士兵或者作战设备进行定位,图1所示是战争局部环境UWB定位系统构成。战场环境分为定位基站布置层、分隔层和局部战争环境层,其中分隔层以下的局部战争环境不能接收GPS定位信号,由于UWB脉冲信号抗噪声能力强、多径分辨力高、具有穿透性,使得基站布置层的UWB基站可以对局部战争环境中的目标节点进行定位。由于分隔层以上的定位基站布置层环境受到战争的影响较小,可以接收到较强GPS定位信号进行定位。采用4个UWB基站对目标节点进行三维定位,UWB基站由小型无人机送达定位基站布置层,UWB基站利用其自带的GPS接收机和GPS地面控制站的GPS接收信号对无人机进行差分定位,获得UWB基站在东北天(x,y,z)坐标上的绝对位置坐标值。4个UWB基站对于作战环境中的士兵或者作战设备等目标节点进行相对定位,如图1所示获得目标节点2对于UWB基站的相对位置,结合4个UWB基站的绝对位置坐标,获得目标节点2的绝对位置坐标,4个UWB基站将处理后的数据通过无线传输方式传输到控制室,控制室实现对士兵或作战设备的智能指挥控制,有效地解决了因为战争环境复杂带来的无法定位的问题。

图1 战争局部环境UWB定位系统图Fig.1 UWB positioning system for local war environment
1.2 UWB定位技术
1)UWB定位原理
UWB定位系统使用短脉冲超宽频技术可以精准定位一个超宽频射频标签。其原理是每个UWB系统的定位标签反复发出脉冲数据包,这个数据包由一串超宽频脉冲组成[12]。利用信号在基站和标签之间的飞行时间可以测量基站和标签间的距离。由于这些标签不是同时发送,并且每个标签发送的时间极短,因此每个数据包发生碰撞的可能性极小,故而在同一区域能够同时处理几百甚至上千个定位标签。超宽带脉冲极宽的特征使得UWB基站接收测量脉冲数据包到达时间可以精确到纳秒级[12],因此UWB的测距误差很小。
2)UWB定位方式对比
超宽带定位技术根据其选用的参数不同,定位类型可分为基于信号到达能耗定位(RSSI)、基于信号到达角度定位(AOA)、基于信号到达时间差定位(TDOA)和基于信号到达时间定位(TOA)等方式[13]。
表1所示是超宽带定位技术原理优缺点对比分析,从表中可以看出:基于信号到达时间定位(TOA)方式具有基站布置方便,定位精度高的特点。基于战争局部环境恶劣的情况,本文选择TOA型超宽带定位方式作为战争局部环境定位技术研究对象。

表1 超宽带定位技术原理对比Tab.1 Comparison of UWB positioning technology principles
3)基于信号到达时间定位(TOA)
TOA(Time of Arrival)是基于测量信号到达时间来进行定位的,通过测量信号从目标模块到各个测量模块之间的飞行时间,进而得到定位目标到各个测量模块间的距离[15-16]。平面TOA定位可通过解算二元二次方程组确定位置,其基本原理如图2所示

图2 二维平面TOA定位原理图Fig.2 TOA positioning principle of two-dimensional plane
设所求目标节点坐标位置坐标为(x,y),测量模块位置坐标为(xi,yi),则建立TOA定位方程组为

式(1)中:r1和r2代表两个测量模块到目标模块的距离值。三维空间定位中,TOA的定位模型为三元二次方程组为
从式(1)和式(2)可以解出二维平面或三维空间测量目标节点的位置坐标(x,y)或(x,y,z),并且对于二维平面UWB定位需要两个或两个以上的基站,三维空间UWB定位需要三个或三个以上的定位基站。
2 UWB定位误差分析
2.1 UWB定位误差来源
UWB以TOA方式定位时无测距误差和有测距误差的原理图如图3所示。图3(a)是TOA定位无测距误差的原理图,4个UWB基站能够确定唯一的解,即4个基站以测得距离作圆相交于一点。而图3(b)是TOA定位存在测距误差的原理图,由于多路径传输、电磁干扰或者硬件系统测距误差对基站本身产生影响,使得4个圆无法相交于一点,而是形成一个公共区域,即模糊定位区域。这时TOA方程组是矛盾方程组,会出现无实数解或者多解甚至无解的情况,在这种情况下无法获得目标位置。

图3 TOA定位方式无测距误差和存在测距误差原理图Fig.3 Schematic diagram of TOA positioning method without ranging error and with ranging error
2.2 UWB定位误差优化
为了使得4个UWB基站测距值能够解出目标节点唯一确定的坐标值,采用林传分等[10]提出的一种解决全质心思路的求解方法。其原理是通过最小二乘法寻求平面内多圆相交公共区域的全质心位置,进而得到可行解,但是该文献中只是分析了全质心算法在二维平面的应用。本文针对目标节点进行三维定位,拓展出全质心算法的三维定位公式。以图2中的战争局部环境UWB定位系统中4个UWB基站布置情况进行推导,全质心算法的解算步骤如下:设定所求目标节点的空间坐标为(x,y,z),GPS定位出4个UWB基站的 空间坐标分别为:(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)和(x4,y4,z4),di代表第i 个 UWB基站到目标节点的测量距离,则可以建立下列TOA方程为

将方程(3)组改变为矩阵形式为

设定x2+y2+z2=r,Pi=di-x2i-y2i-z2i,则式(4)可改写为
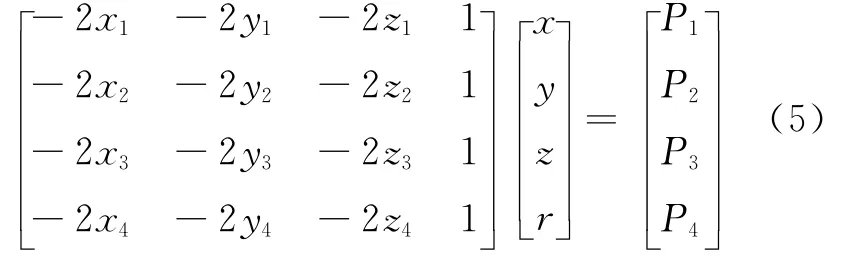
将式(5)中的矩阵定义为矢量形式

则式(5)可以转化为αθ=P,通过最小二乘法解算出θLS=(αTα)-1αTP,式中θLS向量中的前三项即为所求目标标签的空间坐标(x,y,z)。有效避免了由于模糊定位区域TOA方程组出现无实数解或者多解甚至无解的情况,使得目标节点位置坐标有唯一的解。
3 UWB定位仿真分析
为了验证战场局部环境UWB定位方法的可行性和三维全质心算法的准确性,对战争局部环境定位系统的定位误差进行数值仿真研究。图4所示战场局部环境UWB定位仿真过程为:设定空中4个UWB基站的绝对位置坐标分别为(12 m,15 m,100 m)、(12 m,1 115 m,112 m)、(1 112 m,15 m,99 m)和(1 120 m,1 121 m,116 m),然后设置出37个目标节点的位置坐标,通过4个UWB基站和每个目标节点的位置坐标,计算出4个UWB基站到每个目标节点的距离di1,di2,di3,di4(i=1,2,3…37),此时通过Matlab软件中的随机函数引入服从均值为0,方差为400 mm2正态分布的UWB测距误差(参考UWB基站P440模块的测距误差设定),通过全质心算法解算出各个测量点的位置坐标,仿真结果如图5所示。从图5中可以看出针对每一个设置的真实点,全质心算法都能解算出唯一的点与之对应,有效避免了TOA定位方式中出现多个解、无实数解甚至无解的问题。

图4 战场局部环境UWB定位仿真流程图Fig.4 UWB positioning simulation flowchart in battlefield local environment
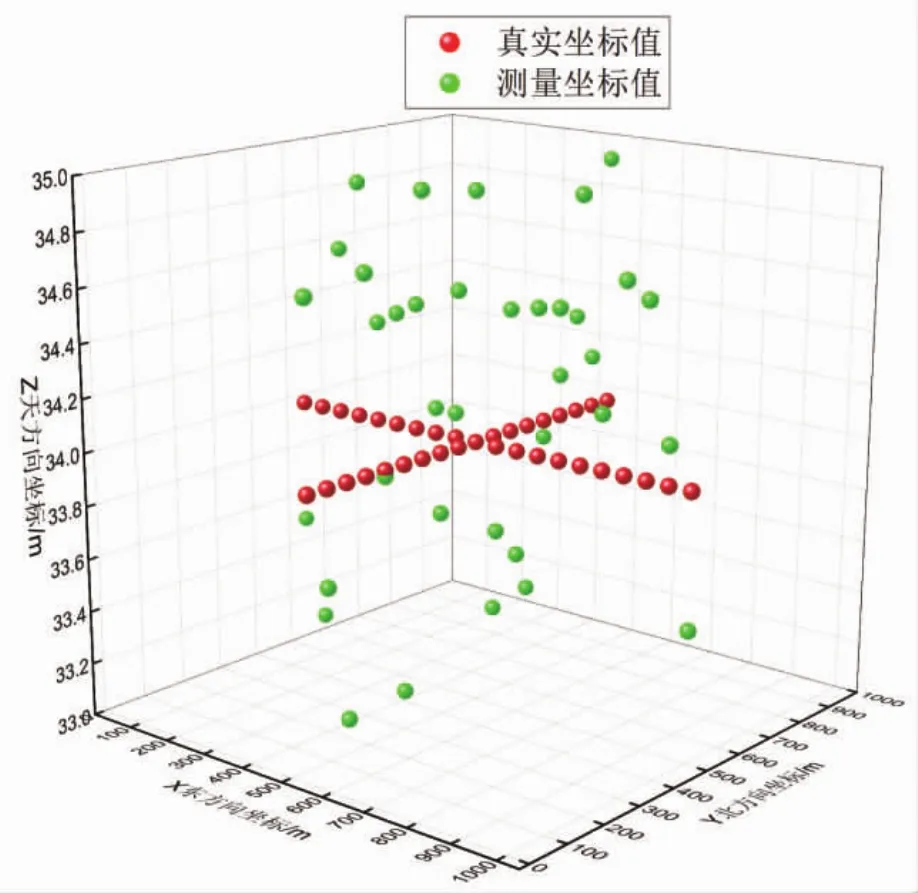
图5 真实点和UWB定位后全质心解算点对比Fig.5 Comparison of full centroid solution points after real point and UWB positioning
为了评价战场局部环境定位系统的定位误差,对比分析测量点和设置点在x、y、z三个方向的误差,作出在各个测量点的误差分布如图6、图7和图8所示,从图中可以看出37个测量点的在x方向的测量误差绝对值在0.03 m以内,在y方向的测量误差绝对值在0.06 m以内,但是在z方向的测量误差较大,误差绝对值在1 m以内。
为了提高z方向的定位误差,利用定位精度较高的x、y坐标值对z方向坐标值进行二次计算,计算公式为
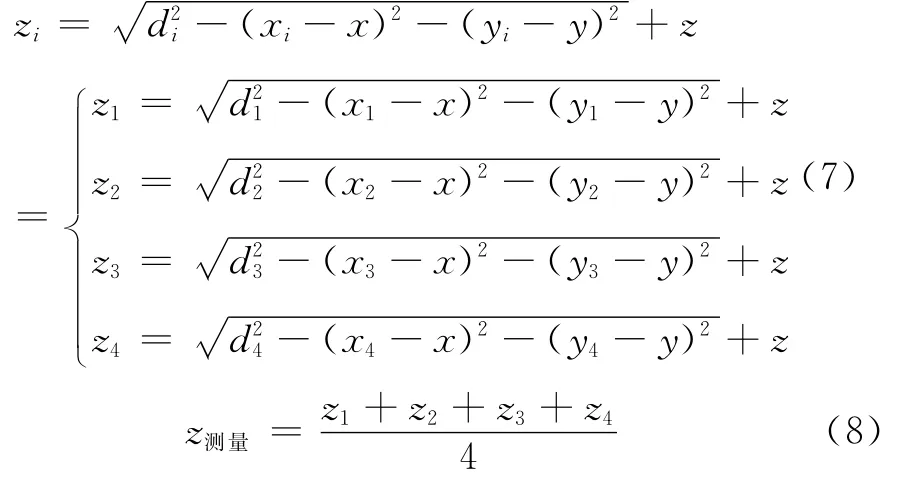

图6 x方向的测量误差Fig.6 Measurement error in xdirection
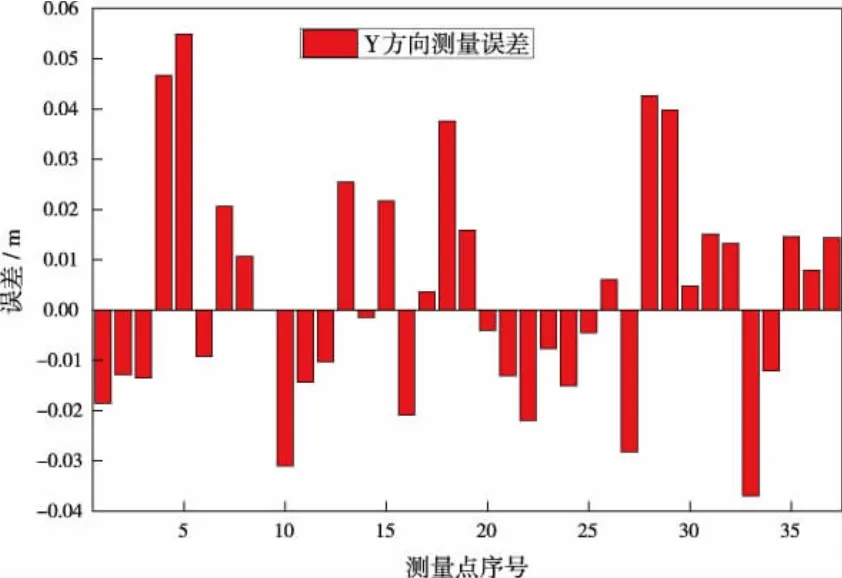
图7 y方向的测量误差Fig.7 Measurement error in ydirection
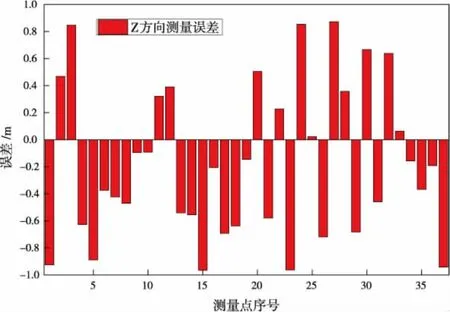
图8 z方向的测量误差Fig.8 Measurement error in zdirection
通过对z方向坐标值进行二次计算,作出真实坐标值和二次计算后坐标值的对比图,如图9所示。测量点z方向二次计算后的定位误差如图10所示。对比图8和图10可知,通过二次计算的方法很大程度上提高了z方向的定位精度,即z方向定位误差在0.09 m以内,验证了战争局部环境定位方法的可行性。

图9 真实点和二次计算后的测量点对比Fig.9 Comparison of measured points after real points and secondary calculations

图10 二次计算后z方向测量误差Fig.10 Z-direction measurement error after secondary calculation
4 结束语
对比超宽带(UWB)定位方式的优缺点,结合战场环境的特征,选择UWB基于信号到达时间定位(TOA)的定位方式,并进行了战争局部环境定位系统的构建。根据对TOA定位方式中存在多解、无实数解甚至无解的问题,提出采用全质心算法确定TOA定位方式的唯一实数解。为验证战场局部环境UWB定位方法的可行性和三维全质心算法的准确性,在Matlab环境中进行了数值仿真试验。仿真结果显示:利用全质心算法可以求出TOA定位方式中的唯一实数解,在参考UWB基站P440的测距误差,设定该误差服从均值为0、方差为400 mm2正态分布条件下进行仿真试验,数值仿真结果表明在x方向的定位误差小于0.03 m,在y方向的定位误差小于0.06 m,而在z方向的定位误差小于1 m。采用二次计算的方法可将z方向的定位误差提升至0.09 m以内,验证了构建的战争局部环境定位系统的定位可行性和三维全质心算法的准确性。
