基于改进型神经网络PID算法的太阳翼α驱动控制技术
2018-10-26吴鹏飞易志坤吴智杰仇存凯付伟平
吴鹏飞,石 然,易志坤,吴智杰,仇存凯,付伟平
(1.上海航天控制技术研究所,上海,201109;2.上海市空间智能控制技术重点实验室,上海,201109;3.南昌航空大学,江西 南昌,330000)
0 引 言
国外对太阳翼驱动装置的研究和应用起步较早,美国的MOOG公司、法国的SEP和CNES公司、德国的TEL-DIX公司、加拿大的SPAR公司等都是著名的太阳翼驱动装置生产厂家。法国CNES公司在设计卫星太阳翼驱动机构时认为太阳翼的转速不稳定是由滚珠轴承和电机组件的摩擦力矩干扰造成的;加拿大SPAR公司在实验中测出了电机组件的摩擦干扰和高低速端的传动机构之间的摩擦会直接影响电机和帆板转速的平稳性;DORNIER公司则采用了太阳翼驱动系统模型分析驱动特性与摩擦力矩以及齿隙相关。因此,可以总结出太阳翼驱动机构存在的主要问题有:摩擦干扰和齿隙扰动[1-4]。
为了减小扰动的影响,本文采取了低速性能优越、转矩脉动较小、精度高的永磁同步电机(permanent magnet synchronous motor,PMSM)取代步进电机或无刷电机作为大型太阳翼的驱动电机,这样一来可以提高精度、减小驱动过程中由电机脉动产生的不良影响。由于空间站实验舱电机轴端(高速端)和太阳翼端(低速端)存在一个500∶1的减速器,太阳翼α方向的驱动控制会受到多级齿轮间隙造成的空程、冲击扰动影响和摩擦干扰的影响,导致太阳翼对日定向跟踪精度变差,甚至直接影响航天器本体的姿态控制[2-3]。针对这方面的问题,本文提出采用自学习、自适应能力较强的改进型BP神经网络PID控制器替代目前样机中的PID控制器,这是因为经典PID控制器在伺服系统受到负载扰动或参数变化的情况下,控制效果变差,采用智能控制算法改进经典PID控制器,两者相互结合,不仅可以保持PID控制器的简单结构,而且可以起到自适应调整PID参数、提升系统鲁棒性的作用。
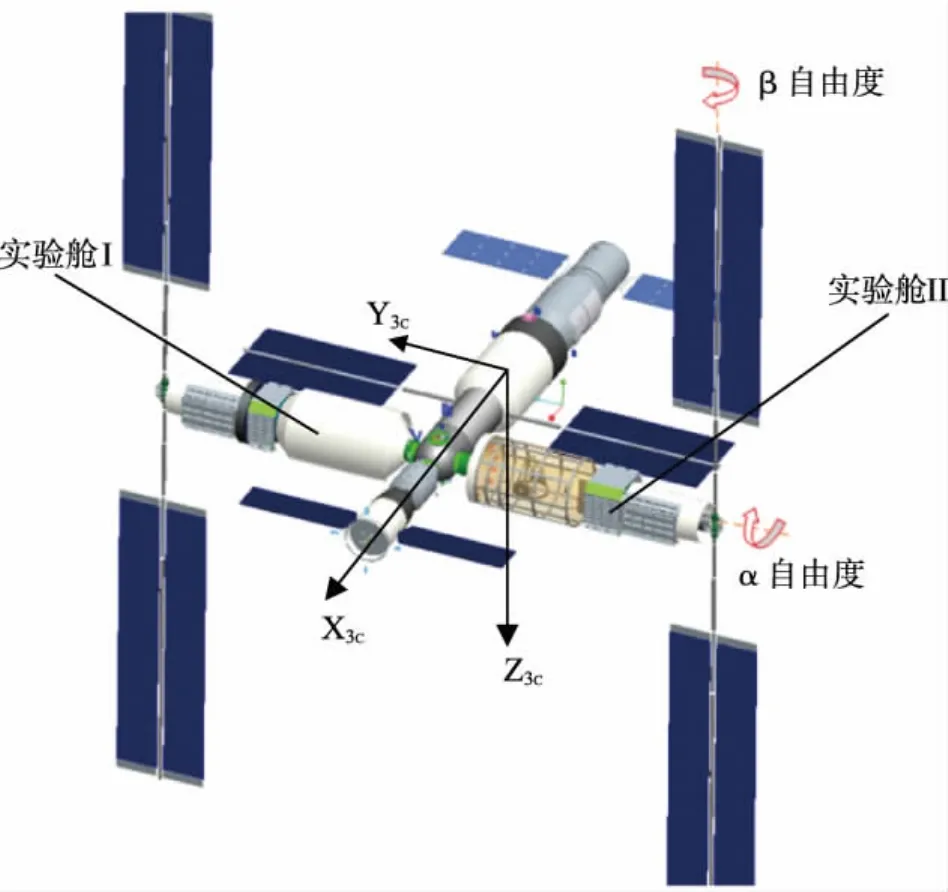
图1 太阳翼结构图Fig.1 The structure of Solar Array
1 太阳翼驱动系统组成及工作原理
对日定向太阳翼结构图如图1所示。
从图1中可以看出,α方向为帆板沿Y轴为中心轴的旋转方向,相比β驱动,α方向的驱动具有低速、大惯量、高精度的特点。
整个太阳翼α驱动系统主要由驱动控制组合、伺服驱动电机、减速器、反馈测量装置、电源管理器、双翼帆板等组成。
其工作原理如图2所示:系统供电后,电源管理器通过DC/DC模块将一次电源进行转换,得到功率电源和控制电源;控制电源和功率电源依次上电后,驱动器接收到来自数管分系统的指令,经过算法的解析后,输出相应的电机控制信号;经过驱动电路的放大作用,得到放大后的电机控制信号并传输给驱动电机;驱动电机执行相应指令;最后通过减速器带动太阳翼低速转动,同时利用旋变等测量装置测出实际的角度,反馈给控制回路,实现闭环控制。
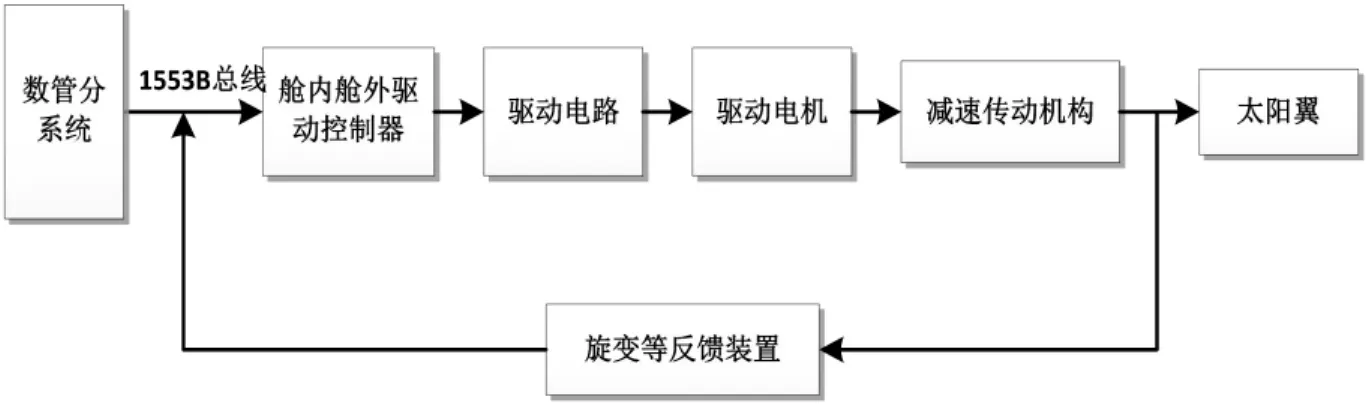
图2 太阳翼驱动系统工作原理Fig.2 Working principle of solar array drive system
2 太阳翼驱动系统中的问题及动力学模型
2.1 齿轮间隙及摩擦扰动
齿轮间隙和摩擦扰动问题在太阳翼α驱动系统中普遍存在,在太阳翼对日定向装置中,存在高速端和低速端,两端之间依靠齿轮传动,这两端之间的减速器存在多级(假设为5级)齿轮,如图3所示,θM、θ1~θ4为电机转子和各级传动齿轮的转角;JM=3.487 4e-6kg· m2,J1=5.869 3e-4kg· m2,J2=7.353 4e-4kg·m2,J3=2.490 7e-4kg· m2,J4=3.2e-3kg·m2分别为电机转子和各级传动齿轮在各自转轴上的转动惯量;TM,θM分别为电机的输出力矩和转角[5]。
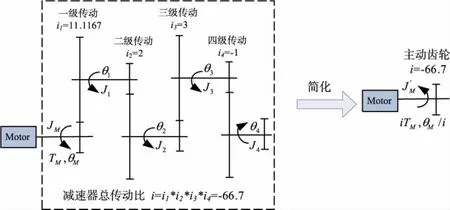
图3 减速器传动关系示意图Fig.3 The diagram of decelerator transmission
在太阳翼装置加工和装配的过程中,存在各种误差,并且需要在齿轮之间预留一定的间隙,便于存储润滑油,同时防止齿轮卡死。
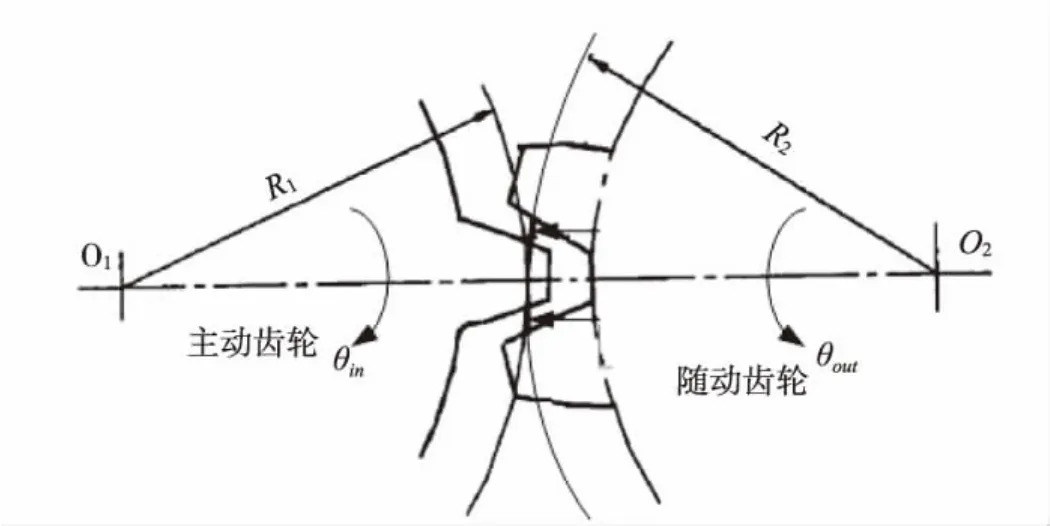
图4 齿轮间隙示意图Fig.4 The diagram of gear clearance
理想的齿轮传动装置,其输入和输出呈线性关系,但是由于上述齿轮间隙α的存在,导致主动轮输入角θin和随动轮输出角θout之间呈现出图5所示的滞环非线性特性。
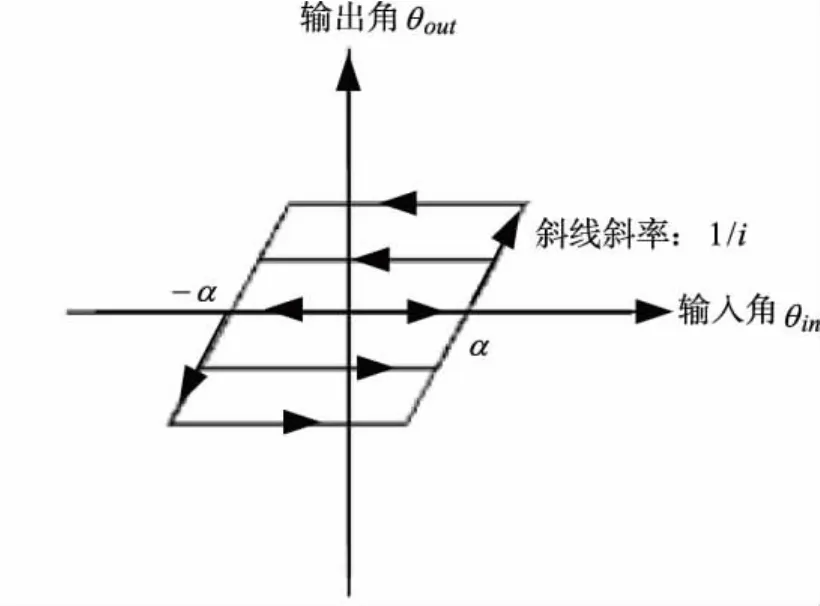
图5 滞环特性示意图Fig.5 The diagram of hysteresis characteristics
从上述滞环特性示意图可以看出:
1)当齿轮间隙对称分布在齿轮的两侧时,主动齿轮转动,并且转角θin≤α(2α为齿隙),此时从动轮并不转动,输出角θout一直为零,两轮之间没有力矩的传递。
2)当θin>α时,从动轮才按θout=θin/i的关系转动,此时两轮之间才建立起力矩传递关系。
3)若主动轮在转角θin>α时开始反方向转动,因为齿轮间隙的存在,从动齿轮不会马上反方向转动,这时候两齿轮之间没有力矩传递,而是当主动齿轮已经转过整个齿轮间隙2α之后,从动齿轮才开始反方向转动,并仍以θout=θin/i的关系转动。
由此可见,由于齿隙的存在,在主动齿轮启动和反向过程,传动装置出现了回转角的滞后误差(回差),因此含有齿轮传动装置的输入量和输出量之间须当作非线性环节对待。
从图5的齿轮滞环特性图可以看出,由于存在齿轮间隙,两齿轮接触之前不存在力矩传递,只有当两齿轮接触之后才会有力矩的传递,所以,采用死区模型描述力矩传递关系比较合适,力矩的数学模型为
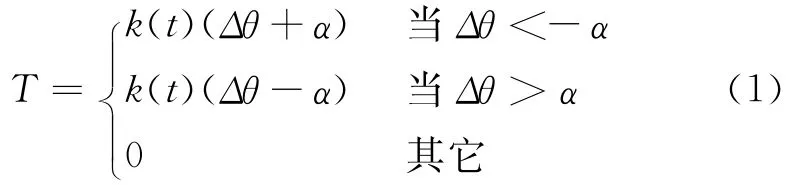
式中:Δθ =θin-iθout,α为半齿隙,k(t)为刚性系数。
根据公式(1)可以作出死区模型示意图,如图6所示。
太阳翼驱动系统的减速器和内齿圈组成了一个多级齿轮传动系统,当电机输出轴固定时,根据传动比i1,i2,…,iM-1,可将每一级齿轮副的齿隙α1,α2,…,αM折算到负载轴上,得到总齿隙为
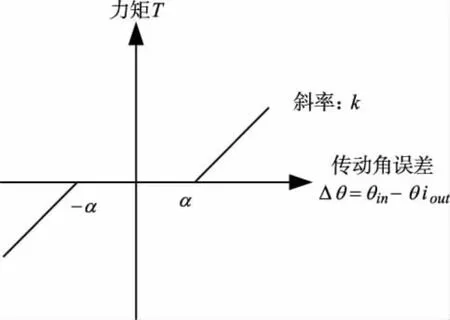
图6 死区模型示意图Fig.6 The diagram of dead zone model
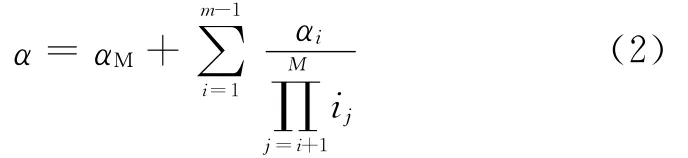
由于减速器各级传动比ij均大于1,由式(2)可知,前M-1级齿轮副的间隙对整个系统的间隙的贡献很小,据此可以认为总间隙只需要考虑末级传动的间隙,而忽略其它各级的间隙。据此,后续在对齿轮系统动力学建模时,可以将驱动电机作为力矩发生源,将整个减速器作为主动齿轮,而将内齿圈当做随动齿轮,从而简化动力学模型[6-7]。
根据上图简化得到的主动齿轮的等效输出力矩和等效转角分别为iTM和θM/i,等效转动惯量J'M稍微复杂,可由式(3)的力矩平衡方程计算。
式中:Tik(k=1~4)为各级齿轮副之间的传递力矩。上式可化简为

于是,等效转动惯量为

代入具体数值后计算得到J′M=0.046 74kg·m2。
除了齿隙干扰影响,还存在摩擦干扰影响。由于驱动电机内部、各级齿轮之间的传动以及TBA导轨和内齿圈之间等多个环节存在摩擦力矩,对驱动电机速度跟踪的动态性能和稳态精度将会产生多方面的影响:
1)当帆板从零速度开始转动时,因为静摩擦的可变性,帆板会体现出弹簧现象。静摩擦的可变性指的是静摩擦的大小将会随着两接触面间保持相对静止的时间变化而改变,相对运动发生之前的静止时间保持得越长,意味着静摩擦会越大。
2)因为存在摩擦迟滞现象,可能会导致低速爬行、极限环振荡现象。迟滞现象指的是速度发生变化具有时间上的滞后。
3)当帆板的转速经过零点时,摩擦力的方向在零点附近瞬间改变,此刻电机的电磁力矩难以在如此短的时间之内对这种突然发生改变的强干扰做出响应。
4)帆板在正常运转时,因为非线性摩擦干扰具有时变的特点,驱动电机的速度调节器难以准确地复现指令,使得控制精度降低。
许多实践表明,在目前提出的三十多种摩擦模型中,LuGre模型、Karnopp模型和综合模型是效果比较理想的三种典型摩擦模型。1995年,Canudas等人提出了LuGre摩擦模型,该模型是基于刚毛假设理论提出的,即相互接触的刚毛之间一旦发生相对运动时,就会导致形变而产生摩擦,进而产生滑动。LuGre摩擦模型在伺服控制系统中得到了广泛应用,能准确地描述摩擦过程中的复杂动态、静态特性[8]。
对于伺服系统,用微分方程描述摩擦力矩与其它各个量之间的关系

式中:J表示转动惯量,θ表示转角,u表示控制力矩,F表示摩擦力矩。
LuGre模型中包含了两物体接触面内部无法测量的变量z,这个变量表征了发生摩擦时的相对变形,摩擦力矩F可以由式(5)~(7)描述。
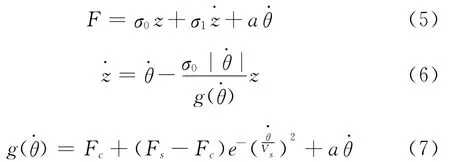
式(5)、(6)、(7)就是 LuGre摩擦模型。其中,σ0、σ1表示动态摩擦参数;Fc、Fs、a、Vs表示静态摩擦参数;Fc表示库仑摩擦;Fs表示静摩擦;a表示黏性摩擦系数;Vs表示切换速度。
2.2 齿轮间隙及摩擦模型验证
如图7仿真结果所示,由于齿隙的存在,导致帆板转角跟踪存在0.15°的偏差,并且跟踪过程中出现了抖动,从而降低了系统的定位精度,增大了系统的静态误差。这是因为:由于齿隙的存在,当驱动电机转动时,齿轮装置输出轴并不马上随之转动,只有当输入轴转动过了齿轮间隙产生的齿轮间隙角以后,输出轴才会带动帆板低速转动。当输入轴转过的角度小于齿轮间隙角,PMSM此时工作于空载状态,因而,PMSM在此段时间内具有较大动能。当输出轴已经转过齿轮间隙角时,主动齿轮的轮齿和从动齿轮的轮齿在接触时产生碰撞,会产生一个较大的冲击,进而从动齿轮带动负载转动。这个过程相当于驱动电机刚开始是空载运行,经过一个很小的时刻后,突然受到一个较大的负载力矩,后文对电机受到干扰的仿真过程中,将这个负载力矩假设成一个冲击形式的力矩。
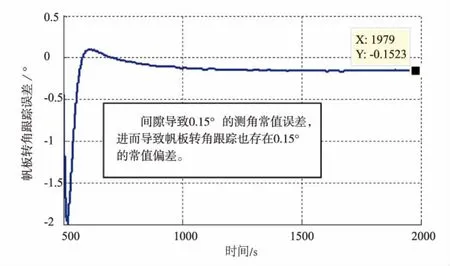
图7 角位置跟踪误差Fig.7 Angular position tracking error

图8 原理样机低速端角速度实测情况Fig.8 The actual measurement of low speed angular velocity on prototype
在原理样机上实测的结果如图8所示,图8描述的是低速端(太阳翼负载端)的角速度波形。从图中可以看出,冲击扰动对角速度的影响非常明显,目前的PI控制器难以克服这些扰动影响,速度平稳度无法达到10%的指标要求。
原理样机中实测的高速端(电机轴端)角度情况如图9所示,实测结果和上述根据摩擦模型得出的结论基本一致。
如图10所示,α驱动系统中的摩擦干扰带来的影响也可以通过仿真测出。当帆板未转动时,摩擦力为静摩擦;转动后,转为动摩擦,符合建模分析的结论。摩擦力矩对驱动控制系统来说,可以看成一个干扰力矩,通过上一节的LuGre摩擦模型可以比较准确地描述摩擦力矩的形式。

图9 原理样机高速端角度实测情况Fig.9 The actual measurement of high speed angular velocity on principle prototype
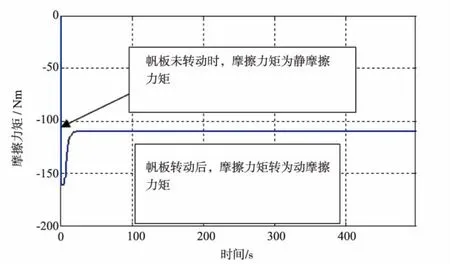
图10 摩擦力矩影响仿真情况Fig.10 Influence of friction moment on simulation
3 改进型BP神经网络PID控制器设计
采用神经网络PID控制器的PMSM伺服系统结构图如图11所示[8-10]。
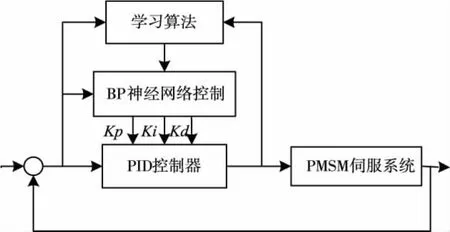
图11 BP神经网络PID控制结构图Fig.11 The PID control structure diagram of BP neural network
由图11中的BP神经网络PID控制结构图可以看出,整个控制系统是一个闭环结构,PID控制器对输入量进行调节,引入BP神经网络控制算法对PID控制器的3个参数Kp、Ki、Kd进行在线整定,网络为三层结构[7][11]。
经典的PID算法,如果采用增量式数字PID算法,可以写出增量式PID算法的公式为

其中,Kp、Ki、Kd分别表示比例系数、积分系数和微分系数,e(k)表示控制误差。
结合BP神经网络模型的建立过程,可以得到PID三个参数值分别为
选取隐含层和输出层神经元的激活函数时,选取Sigmoid函数可以保证PID的三个参数不为负值,即

设性能指标函数为

采用最速下降法修正上述神经网络的权系数

式中:η为神经网络的学习速率;
输出层的权值调整量为

从式(13)中可以看出,传统BP算法的权值调整有两个问题:1)采用了固定的学习率,即迭代步长不变,这将会导致调节速度固定;2)采用了梯度法调节,梯度法本身存在的缺陷(只考虑当前点的梯度,会导致陷入局部极小值)会影响权值调整的效果。
为了加速BP神经网络的收敛速度,很多文献中都提出将固定的学习率设置成自适应学习率[12-13],选取一个初始学习率,如果权值的调整量真正降低了误差函数,则说明选取的学习率值偏小,需要增大学习率,让每次调整量更大,从而更快地降低误差[7];反之,则说明学习率调得过大,不能使误差变小。学习率自适应调整公式为
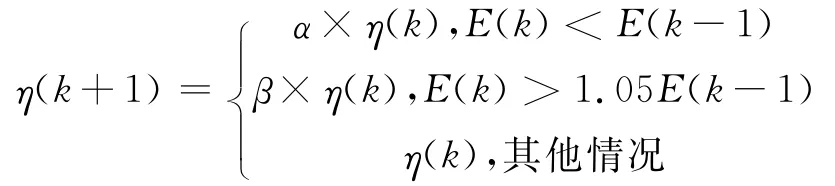
式中:α、β的取值范围一般设置在 [1,1.5]、[0,0.8]内,两个参数的取值视具体情况而定,不宜设置得过大或过小,否则会出现系统振荡或者发散的情况。如果权值的调整量真正降低了误差函数,即本次误差小于上次误差,则需要增大到α倍学习率;如果调整过头,则需要减少到β倍学习率。
采用这种自适应学习率进行多次仿真发现两个问题:1)收敛速度提升很小(某次仿真中训练次数从473次减小为451次,仅减小22次);2)训练效果依赖于系数α、β的选取,当选取偏大时,训练结果发散。
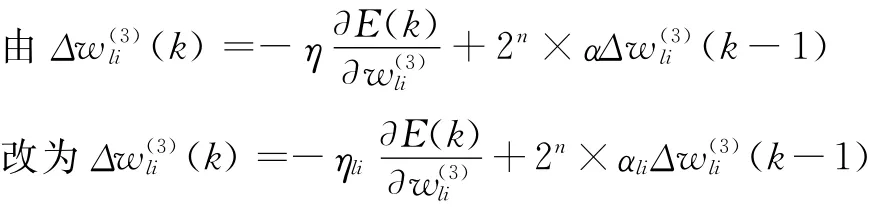
因此对现有文献中的自适应学习率进行再次改进,将原改进中的无差异化自适应学习率改为差异化自适应学习率,在误差反向调节过程中,对不同神经元节点之间的连接权值都采用不同的学习率进行调整。采用的学习率是自适应学习率,才能根据每个神经元节点间的不同权值进行相应调整,最大限度地实现学习率的“自适应”。

图12 差异化改进过程Fig.12 The process of differentiation improvement
基于上述改进过程的启发,对动量项也进行差异化调节,将自适应动量项由无差异化动量项改进为差异化动量项,即
改进后引入太阳翼中齿隙干扰和摩擦干扰,按照上述算法思想进行仿真验证。
4 仿真分析
4.1 克服齿轮间隙干扰效果对比分析
引入类似于第2节中太阳翼齿轮间隙对驱动电机的干扰影响:因为有齿轮间隙的存在,当驱动电机转动时,齿轮装置输出轴并不马上跟着转动,而是在输入轴已经转过齿轮间隙所产生的齿轮间隙角以后,输出轴才会带动太阳帆板转动。
输入正弦函数指令r(t)=6sin(2πft),取f=0.01 Hz,对比基于PID控制的跟踪效果与基于改进型BP神经网络PID控制的跟踪效果。仿真过程中模拟冲击干扰的影响,从200 s时开始施加冲击干扰,并且每隔200 s施加相同的干扰,结果如图13~15所示。
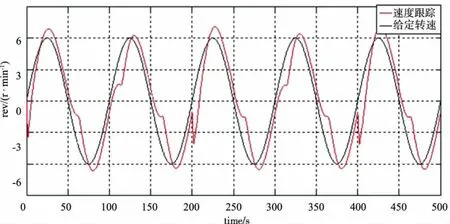
图13 基于经典PID控制的转速跟踪情况Fig.13 Speed tracking based on classic PID control
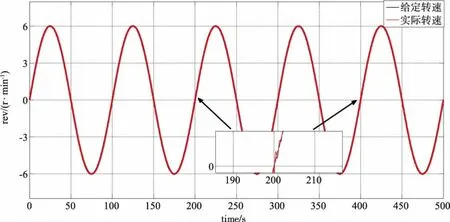
图14 基于改进型BP神经网络PID控制转速跟踪情况Fig.14 Speed tracking based on improved BP neural network PID control
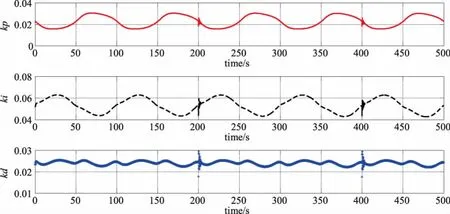
图15 基于改进型BP神经网络PID参数调节情况Fig.15 The PID parameter adjustment based on improved BP neural network
从图13~15可以看出,在不同时刻施加齿轮间隙造成的冲击扰动时,经典PID控制和改进型BP神经网络PID控制跟踪给定输入的效果大不一样。不同点主要有三个:1)施加相同冲击扰动时,PID控制实际跟踪信号波动比改进型神经网络PID控制大,跟踪效果不如改进型BP神经网络PID控制;2)施加相同冲击扰动时,改进型神经网络PID控制能更快地恢复正常跟踪,而PID控制需要更长的时间恢复正常跟踪,即抗扰动能力不如改进后的控制器;3)仿真过程中,施加不同的冲击扰动,可能会造成转速跟踪失调,传统的PID调节器需要重新设定PID参数。
4.2 克服摩擦干扰效果对比分析
为了克服摩擦力的影响,在低速情况下,采用改进型神经网络PID控制对摩擦影响进行补偿,网络采用的是4-5-3结构,其中,输入向量为

输出向量为

初始学习率设为0.2,动量因子为0.5,输入层和输出层的初始权值从[-0.8,0.8]产生随机数。
采用增量式PID算法得出控制量u(k),对含有LuGre摩擦模型的被控对象进行控制,得出输出结果yout,神经网络经过多次循环迭代训练,不断更新权值,最终得出误差值极小的训练结果。经典PID控制和改进型控制器的仿真结果如图16~18所示。
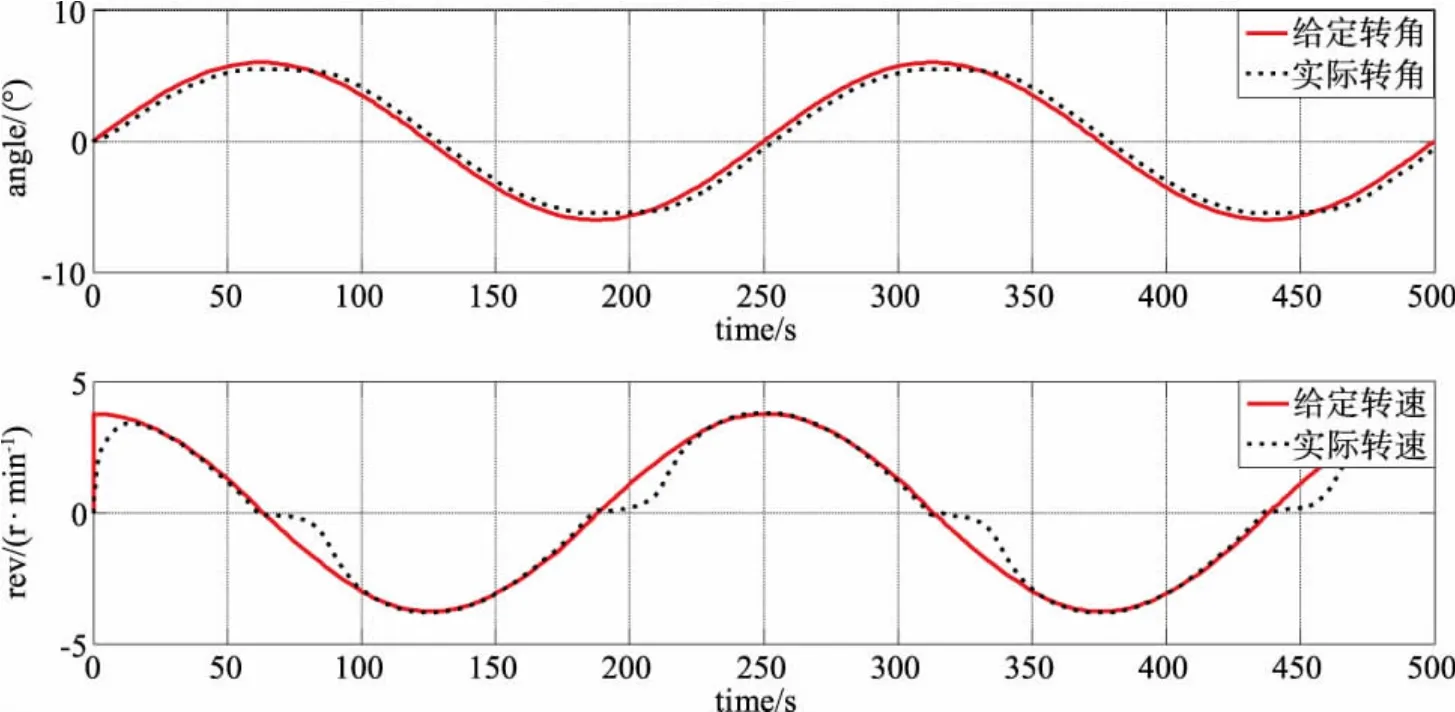
图16 经典PID控制的位置追踪和速度追踪情况Fig.16 Position tracking and speed tracking on classic PID control
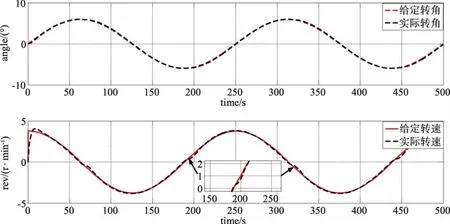
图17 改进型神经网络PID控制的转角追踪和转速追踪情况Fig.17 Corner tracking and speed tracking on improved neural network PID control
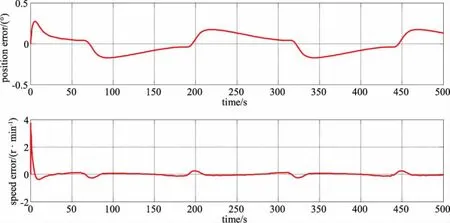
图18 改进型神经网络PID控制的跟踪误差情况Fig.18 Tracking error on improved neural network PID control
对比图16和图17,可以很明显地看出,基于经典PID控制器的α驱动伺服控制系统比较容易受摩擦力的影响,位置跟踪存在明显的“平顶”现象,速度跟踪存在较为明显的“死区”现象,这将对太阳翼伺服控制系统的精度造成极大的影响。从图18中的位置环和速度环误差情况可以看出,当采用改进型神经网络PID控制器时,位置跟踪效果很好,几乎不存在“平顶”现象,速度跟踪虽然仍存在“死区”现象,但是该现象已经得到有效改善。
5 结束语
本文提出了改进型BP神经网络PID太阳翼α驱动控制技术,主要针对空间站大型太阳翼中多级减速器的齿隙扰动和摩擦扰动影响,对空间站大型太阳翼的扰动因素进行了建模分析,对现有文献中的改进型学习率方法进行进一步的改进,提出差异化自适应学习率和自适应动量项法。
通过MATLAB仿真验证了算法的可行性,采用改进型神经网络算法后,分别引入齿隙干扰及摩擦干扰,转速平稳性相比于目前原理样机上采用的PI控制有所改善,动态响应能力更好。
