渔船中动力及转向控制系统研究
2018-09-19吴小洲刘玉良苏玉香张存喜
吴小洲,刘玉良,苏玉香,张存喜
(浙江海洋大学船舶与机电工程学院,浙江舟山 316022)
目前,我国北部湾地区500 t以下的小型渔船有8 000多艘,80%以上都安装了液压舵机,在该类渔船中,往往都是以经济性为出发点,所以安装的舵机大多数是经济型的手动舵机,可以实现自动操舵功能的小型渔船数量不多[1],但自动舵是船舶控制系统中不可缺少的重要设备,通过它可以进行航向设定并使船舶行驶更接近航线,从而更节能、更经济。我国在从20世纪70年代就开始自动舵的研究,并取得了一定的成效,但国内自动舵的研究侧重于理论方面,进行算法仿真,很少做出实际产品。迄今为止,国内船舶安装的自动舵基本依赖进口[2]。同时,我国对向船舶控制的研究往往趋向于船舵控制的单独研究,而往往忽略了渔船作为一个整体在航行中浆舵的配合重要性。
因此本文设计了一套由PLC、电子罗盘、舵角传感器、GPS定位系统、电磁阀驱动组成的自动操舵系统和PLC、变频器、三相异步电动机等组成的自动定速巡航系统配合使用的操作系统来进行渔船的操控,从而实现渔船沿预定航线自动定速航行的功能。本次设计中最重要的是采用了PLC作为控制单元,相比于其他设计中采用的单片机控制,本文中PLC的使用提高了数据运算处理的可靠性以及输出控制的稳定性,同时本文中变频器的运用也使得渔船航行速度得到了更加稳定的控制。另外本文中可视化单元-触摸屏的加入使得大量的物理按钮得到了虚拟化、可视化处理,大大释放了渔船控制室操作台的空间,使得渔船上的人机交互体验感更加友好,这将使得渔民对渔船驾驶的操作更加方便,小型渔船在海洋中航行的安全性、经济性和可操控性[1]更高。
1 渔船动力及转向系统控制设计
本文设计的关键是要实现沿航线自动定速航行的功能,该系统的自动航线控制模块和自动定速巡航模块分别由GPS定位系统、电子罗盘、舵角传感器、舵角指示器、舵角表、液压电磁阀和编码器、水流传感器、GPS测速传感器、变频器、三相异步电动机、380V三相电源组成。自动航线控制模块操舵实现自动转向功能,自动定速巡航模块控制变频器和三相异步电动机实现自动定速巡航功能。系统总图如图1所示。
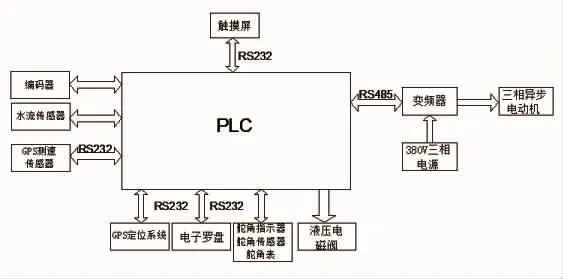
图1 系统总图Fig.1 System diagram
1.1 总体控制方案
本次设计采用三菱PLC FX2N型号作为控制元件,配备触摸屏为系统显示元件,采用变频器、三相异步电动机为系统执行元件,其控制流程图如图2所示。系统采用触摸屏设置预定航线以及航速,并实时动态显示当前所处航线位置、航角、舵角以及当前所维持航速,另外当出现渔船偏离航线、渔船航速波动严重、渔船航速失控、三相异步电机电流电压过载等情况时可实现自动报警,以便渔民进行检查修正。
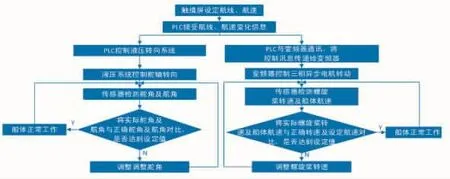
图2 主程序流程图Fig.2 The flow chart of main program
1.2 航线控制
本文中开发的是基于PLC控制的的多任务操舵系统,与传统C51单片机控制的操舵系统相比,无论是在数据处理还是控制精度上,都具有很大的优势。
本系统主要由航角传感器系统、电子罗盘、GPS定位系统、液压电磁阀、触摸显示模块等5个单元组成,控制系统总体结构如图3所示,整个系统主要实现数据采集、显示,控制等功能。其中由PLC实现控制计算,液压电磁阀实现舵角动作,配备传感器GPS定位系统、电子罗盘、舵角反馈模块实现反馈,最终由触摸屏显示控制状态并提供人机交互界面。
此舵角控制模块中采用电子罗盘获取渔船当前航角α°,并与GPS定位系统所得当前航线正确航角γ°进行对比,得出偏航角渍°;再与舵角传感器得到的舵角茁°作比较,经PLC控制器PID算法后产生偏舵角啄°,由啄°的正负以及大小来驱动电磁阀操控舵的左右转向及控制舵的转向角度,如图4所示[3-4]。
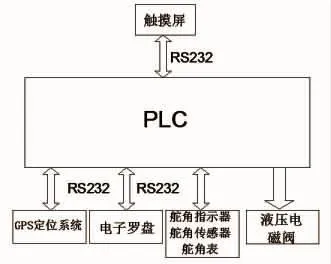
图3 自动操舵简图Fig.3 Automatic steering diagram
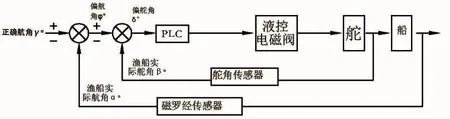
图4 自动操舵控制原理框图Fig.4 Automatic steering control block diagram
1.3 自动定速巡航
在我国大部分小型渔船的航行采用的是手动调节航速进行航行,它需要渔民根据当时海况进行不断地手动调节,这就大大增加了渔民的劳动强度。为减轻渔民的负担,本文在自动操舵的基础上增加设计了渔船自动定速巡航的功能,它能根据当前海域的水流情况对电机转速进行自动调节,从而实现定速巡航功能。
另为响应国家低碳环保的号召,此次设计所采用的的动力系统为电力系统,动力装置为三相异步电动机,由PLC及变频器控制驱动。
1.3.1 定速巡航硬件系统设计
本系统主要由触摸屏、编码器、变频器、三相异步电动机、380 V三相电源等7个单元组成,控制系统总体结构如图5所示,其中触摸屏仍作为人机交互界面使用,编码器、水流传感器、GPS测速传感器作为反馈系统使用,380 V电源提供动力来源,变频器作为三相异步电动机控制装置,由PLC计算数据并实现各模块之间的通讯。
1.3.2 自动定速巡航原理
渔船在海域当中航行时海况复杂,水流流速不断变化,如果采用电机匀速运转,渔船的航行速度将不断发生变化。因此为了实现定速巡航,就需要根据当前海域的水流流速来调节电机转速从而实现渔船航行速度不变。
该模块可完成实际船速、水流流速、电机实际转速的采集、显示、信号转换和传输等功能。如图6所示,本设计选用了GPS测速传感器、水流流速传感器和编码器等传感器。GPS测速传感器首先采集到渔船实际船速,并把船速输送到PLC,经过与给定船速的比较后得到偏航速。之后根据当前海域的水流流速计算出所需电机转速,经与编码器所测当前电机实际转速对比得到偏转速。最后由PLC将所需提升电机转速信息发送给变频器,由变频器控制三相异步电机改变转速,从而实现船舶的定速巡航,其系统程序流程图如图7所示。
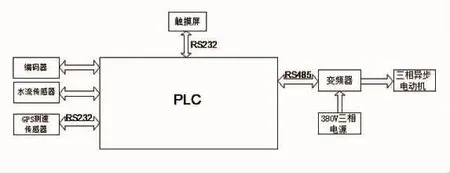
图5 自动定速巡航简图Fig.5 Automatic constant speed cruise diagram
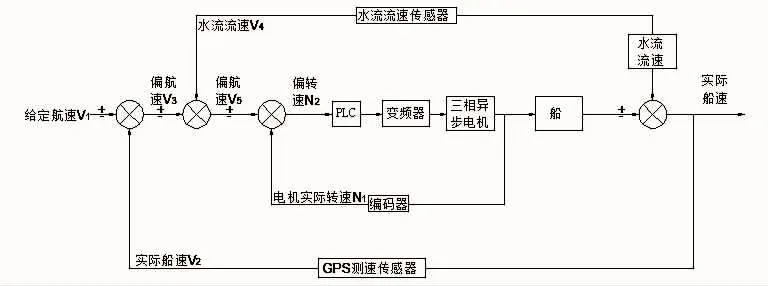
图6 自动定速巡航功能原理图Fig.6 The schematic of automatic constant speed cruise function

图7 自动定速巡航流程图Fig.7 The flow chart of automatic constant speed cruise

图8 航速航线设定图Fig.8 Navigational speed and air route setting map
2 触摸屏系统设计
本次设计的系统包括渔船航线、航速的的设定,渔船航线、航速、舵角的显示以及渔船故障报警的提示三部分。为了方便参数设置以及动态显示渔船航行状态,本次设计中采用了台达的B10E615型号触摸屏作为控制及人机交换单元,该触摸屏具有仪器仪表显示、图表绘制、按钮设置等功能,极大地方便了系统操作设置,同时由于物理按键、仪表仪盘的虚拟化,操作台的空间得到了极大释放。
2.1 渔船航线、航速设定
本次渔船控制系统中可进行渔船航线、航速的设定,从而实现在当前海域的自动航行以及定速巡航功能,另外渔船航速航线的设定由虚拟仪表盘显示,增加了人机交互体验,如图8所示。
2.2 渔船航线、航速的显示
点击下一页菜单按钮进入航速监视页面,如图9所示,此页面设置了实时舵角、航速显示仪表盘,它可显示当前渔船所保持的舵角、航速。本页也设置了航线变化图表绘制功能,它能将渔船历史位置绘制成航线变化图,从而给驾驶者提供直观的航线波动变化对比,以方便驾驶者对渔船的航行进行修正。
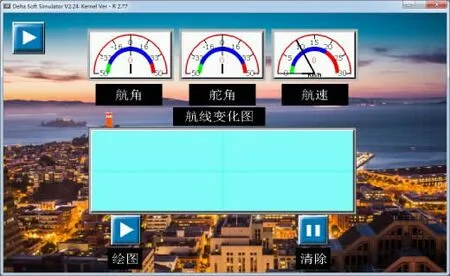
图9 参数显示界面Fig.9 Parameter display interface
2.3 渔船故障的报警提示
另外系统中还加入了渔船历史故障报警记录模块、当前故障报警记录模块和历史故障报警次数记录模块等三个渔船航行报警功能模块。当渔船偏离航线或产生了故障之后相应的传感器会将信息传到PLC,并显示在触摸屏上,并记录在案,如图10和图11所示。同时故障发生的次数也将被触摸屏所记录,供驾驶者在回港之时及时对故障率高的模块进行修复。

图10 报警记录画面Fig.10 Alarm record screen
图11 报警子页面Fig.11 Alarm subpage
3 渔船航行稳定性测试
3.1 PLC控制程序及通讯协议设置
本次试验控制中采用 FX2 N-485D通讯板为PLC与变频器的通讯模块,采用标准的Modbus通讯协议保证PLC与变频器正常通讯,其接线图如图12所示,PLC通讯协议及正转控制程序如图13所示[5]。
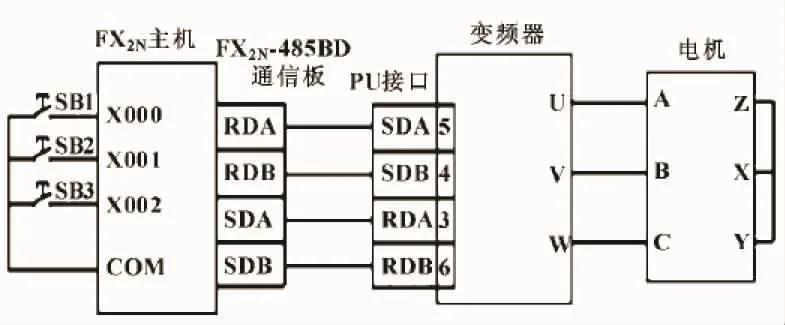
图12 PLC、变频器系统接线图Fig.12 The wiring diagram of PLC,frequency converter system
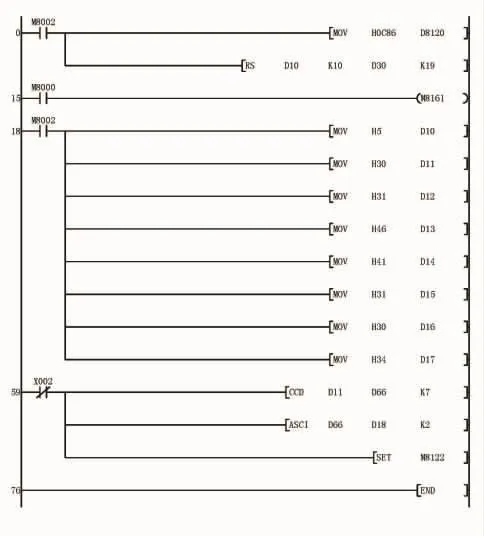
图13 PLC、变频器通讯协议设置及正传控制指令Fig.13 Communication protocol settings and forward control commands of PLC and frequency converter
3.2 变频器PID控制设置
变频器PID调控模式接线如图14所示。试验所用电动机为6极对数三相异步电动机,其额定转速为480 r/min,检测转换装置为光码盘及信号转换电路,输出信号为0~10 V,其具体对应参数见表1,变频器参数设置见表2。

表1 对应转数光码盘及信号转换电路输出信号表Tab.1 The output signal table of optical encoder and signal conversion circuit corresponding to number of revolutions
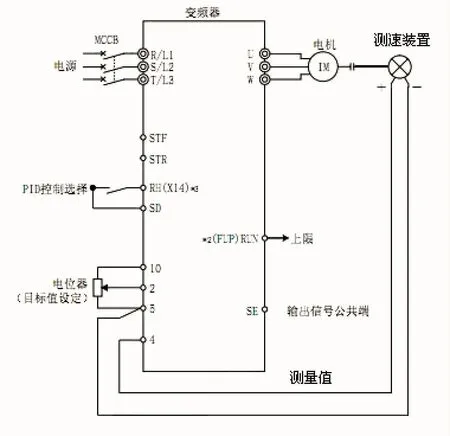
图14 变频器、三相异步电动机接线图Fig.14 The wiring diagram of frequency converter and three-phase asynchronous motor
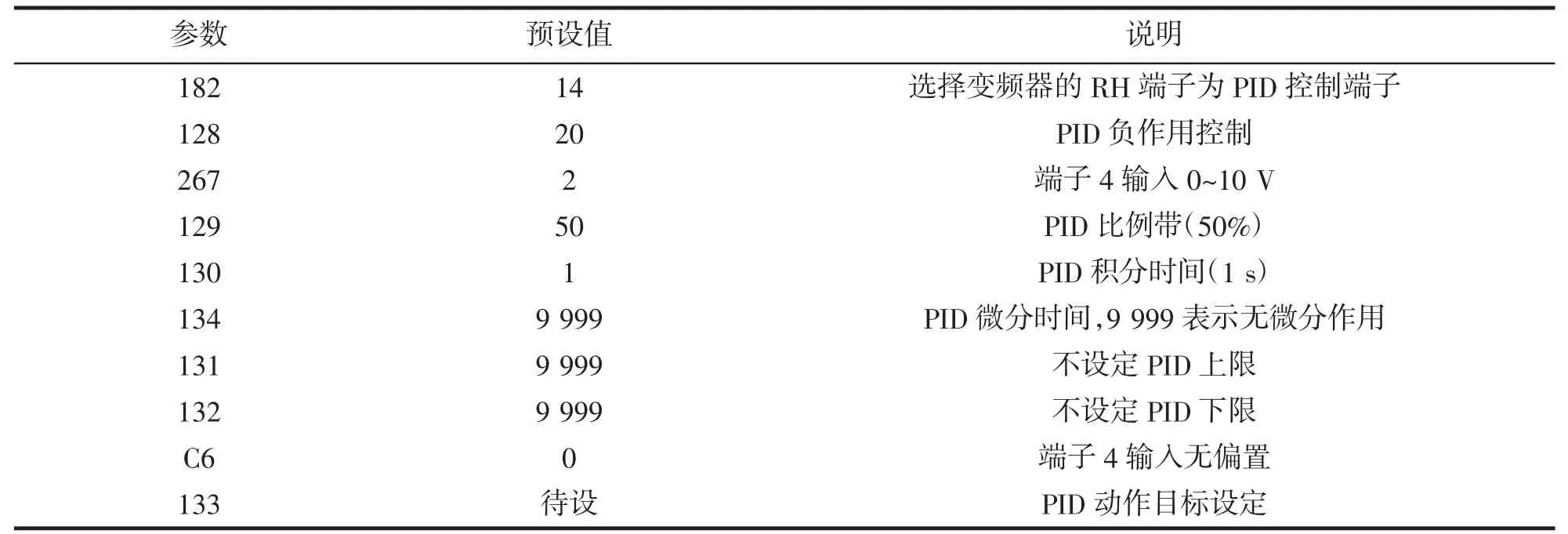
表2 变频器参数设置表Tab.2 The parameter setting table of frequency converter

表3 三相异步电动机转数测试数据记录表Tab.3 The data record table of three-phase asynchronous motor revolution test
3.3 三相异步电动机测速记录
参数设置完毕闭合变频器RH开关,PLC发送正转指令,变频器以PID模式控制电机运转,记录电动机的稳定转速于表3。
由表3可知实际转速与期望的转速误差范围在±5%之内,符合控制系统稳定性的要求,保证了渔船海上航行的稳定性。
4 总结分析
本文基于渔船自动化的需求,完成了动力系统及转向系统的设计,最后进行了相关试验,试验结果表明相较于传统人工操舵、调速控制船只航行,本次设计中所设计的动力系统及转向系统的结合实现了渔船沿航线稳定自动定速巡航的功能,解决了渔船沿航线自动转向航行以及在复杂海域中定速巡航的技术难题。同时本次设计中采用的变频器PID控制模式下的异步电机动力模块,使得整体船只结构相对简单,制造、使用和维护方便,运行可靠,成本较低,符合小型渔船的设计要求。但是由于三相异步电机存在转数差,导致其调速性能较差,所以在一些要求较宽广和平滑调速范围的船只上不太适用。
另外渔船自动化、智能化是渔船技术革新的崭新课题,还有大量的工作要做,所以后续的工作应以渔船整体智能控制技术开发等相关问题为重心展开研究。
