基于ANSYS Workbench的机械刻划弹性刀架动态特性分析
2018-05-25石广丰,王金雨,王子涛等
0 引言
衍射光栅是一种利用表面特定槽型进行衍射分光的重要光学元件,它是光谱仪的核心元件,在工业、国防、科研等领域也有广泛应用[1]。机械刻划法是指金刚石刻刀-弹性刀架系统在刻划装置的驱动下在光栅铝膜上进行犁切-挤压(摩擦)-成槽的一种复杂的、不产生切屑的三维挤压成形工艺,在制备大面积、低刻线密度衍射光栅中具有不可替代的优势[2]。要制备符合技术要求的衍射光栅就必须精准控制槽形质量的影响因素,其中重要一项就是在机械刻划过程中发生的颤振,颤振的发生,会加剧金刚石刻刀磨损,严重影响光栅槽形质量,甚至会使光栅报废,造成严重的损失。
弹性刀架是制备衍射光栅的重要部件,具有刀具起落幅度大、转动灵活、简化金刚石刻刀调整过程等优点,适用于刻划平面光栅和大面积凹面光栅[3]。目前关于机械刻划颤振的研究主要集中在光栅刻划装置的刀桥和驱动系统上,忽略了弹性刀架稳定性对机械刻划颤振影响的研究[4],因此有必要对弹性刀架系统进行动态特性分析,研究其模态振型和固有频率,通过谐响应分析,得出弹性刀架容易发生颤振的频率范围,为抑制机械刻划颤振的发生,提高弹性刀架的稳定性,保证光栅槽形质量提供理论支持[5]。
1 弹性刀架有限元模型
1.1 弹性刀架结构及工作原理
机械刻划弹性刀架系统的结构主要包括主刀架、副刀架、配重杆、十字型弹簧片、连接架、抬刀架、抬刀杆、卡块,如图1所示。
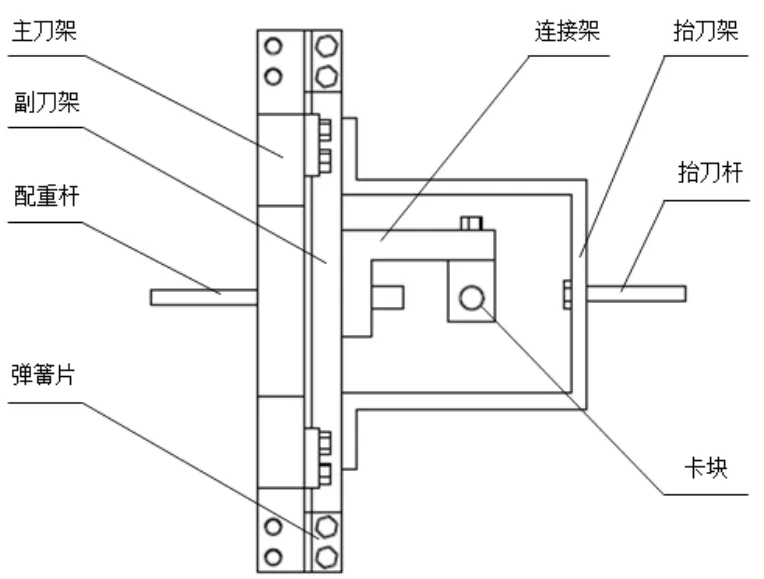
图1 机械刻划弹性刀架系统
主刀架和副刀架构成了弹性刀架的主体结构,卡块安装在连接架上用来装夹金刚石刻刀。刻划过程中,金刚石刻刀的起落主要是通过抬刀架来控制安装在主刀架和副刀架之间的十字型弹簧片的起落幅度来实现的。
机械刻划过程中,当刻划工艺参数达到某一个阈值时,光栅槽形出现了刻线弯曲和表面振纹等现象,由于弹性刀架系统中十字型弹簧片的作用,刀架会自动弹起以保证金刚石刻刀不会崩刃,从而避免刀具的损坏。这种微小的振动,会破坏弹性刀架系统的稳定性,引起金刚石刻刀与光栅铝膜之间的刻划力发生动态变化,动态刻划力所引起的负阻尼使得刻划系统的总阻尼降低而激发颤振。
1.2 弹性刀架有限元模型
运用CATIA软件对弹性刀架系统进行三维建模,为了保证动态特性分析结果的准确性,对弹性刀架系统进行了合理的简化,主要包括:1)在进行三维建模时要保证尺寸的准确性和单位的一致性,避免计算过程中错误的发生。2)对零件中存在一些例如倒角、螺纹等细小特征进行删除处理,以保证网格划分的准确性[6]。最终得到的三维模型如图2所示。
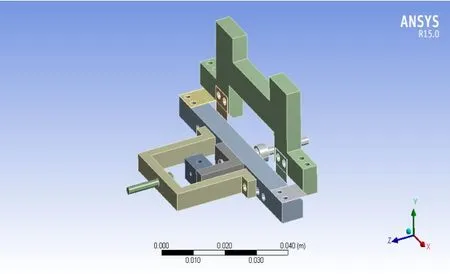
图2 机械刻划弹性刀架系统三维模型
将建立的三维模型导入ANSYS中进行网格划分,采用Combin14单元(弹簧阻尼单元)对弹性刀架系统的主刀架、副刀架与十字型弹簧片进行约束,抬刀架、抬刀杆、调节架、卡块采用Solid92单元进行约束,参数设置为弹性刀架系统的弹性模量为E=200GPa,泊松比为µ=0.3,密度为ρ=7.85g/cm2,并采用均匀的网格划分,网格节点数为503746个,单元数为40397个[7]。
2 弹性刀架模态分析
2.1 模态分析理论
为了更好的研究弹性刀架的稳定性,本文依据刚度和阻尼等效原则将弹性刀架进行简化,如图3所示。
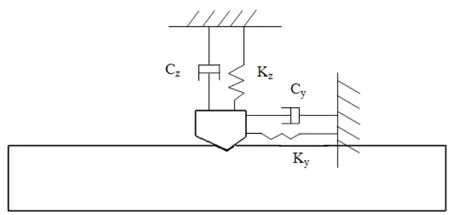
图3 光栅机械刻划摩擦型颤振模型
机械刻划弹性刀架的颤振可以用微分方程进行表示:

其中,[M]、[C]、[K]分别为颤振系统的等效质量、等效阻尼、等效刚度矩阵;分别为颤振系统的加速度向量、速度向量和位移向量;{F(t)}为刻划力向量。
弹性刀架的固有频率由其结构本身决定,与外载荷无关;刻划系统的阻尼对弹性刀架系统的固有频率和振型影响不大,所以忽略外载荷和阻尼项得到新的微分方程:

假设系统做简谐振动,则有:

式中φ表示特征矢量或振型;ω表示频率角;α表示初相角。将式(3)带入式(2)中整理可得:

式(4)中,任意时刻t都成立,所以可以简化为:

其中ωi即为弹性刀架系统振动的固有频率。求解式(5)可得:

2.2 模态分析结果
在有限元分析中,只考虑Fixed Support约束,由于高阶模态对于弹性刀架系统的性能影响很小,因此只考虑弹性刀架系统的1~6阶模态进行研究。图4为弹性刀架系统1~6阶模态振型图,表1为各阶模态对应的固有频率和模态振型描述。
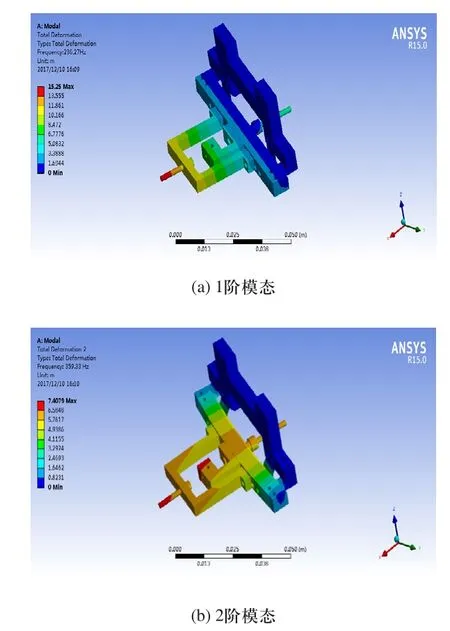
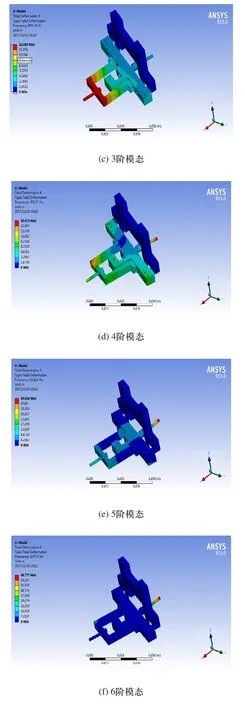
图4 弹性刀架系统1~6阶模态
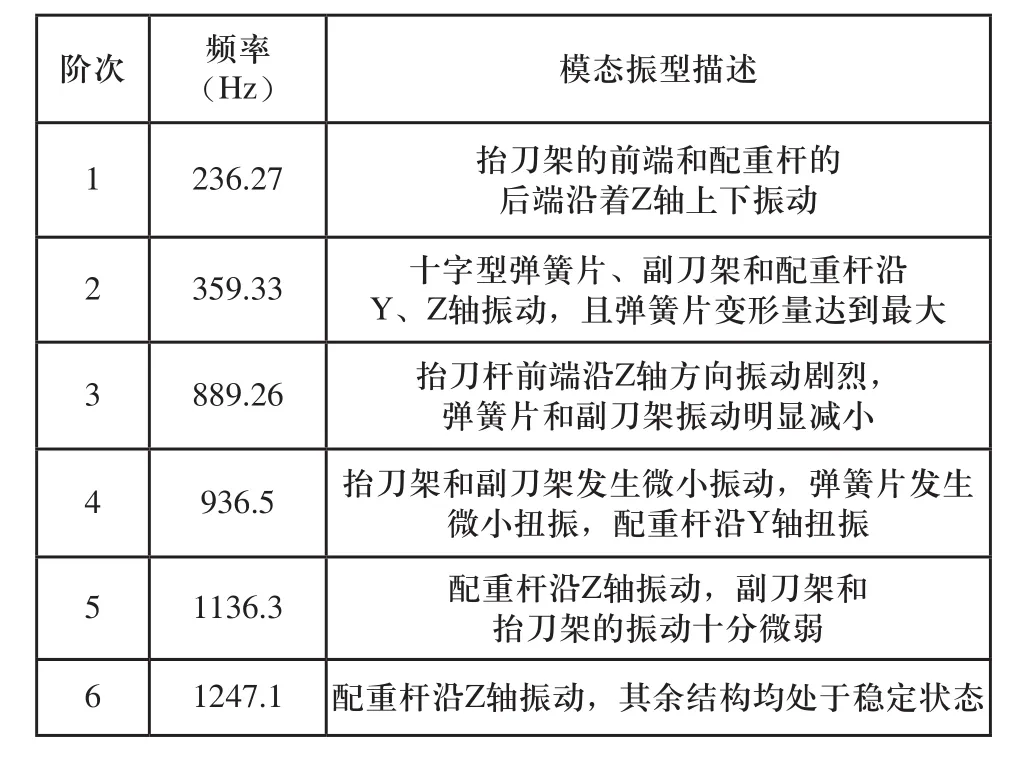
表1 弹性刀架系统1—6阶模态固有频率及振型描述表
通过对弹性刀架1~6阶模态分析可知,弹性刀架沿X轴基本不发生振动,这表明弹性刀架在刻划方向是处于稳定状态的。1~4阶模态的振型主要发生在抬刀架和十字型弹簧片上,且最大振幅出现在2阶模态中弹簧片沿Z轴的振动。而5阶、6阶模态的振型仅有配重杆沿Z轴的振动,但振幅明显减小。
由此可知,弹性刀架的各阶模态的固有频率均大于刻划装置驱动电机的工作频率(160Hz),说明弹性刀架的结构设计是合理的,不会发生共振破坏。弹性刀架副刀架、抬刀架和十字型弹簧片连接处的振动明显,刚度较弱,是弹性刀架系统容易发生颤振的位置,因此在机械刻划过程中,应该尽量避免弹性刀架2阶、3阶模态所对应的固有频率的工作频率范围,来提高弹性刀架系统的稳定性,从而抑制机械刻划颤振的发生。
3 弹性刀架谐响应分析
弹性刀架的模态分析,只能表示出其本身的固有频率和振型,而谐响应分析可以表示出机构在受到不同频率简谐载荷下的变形情况,能够验证模态分析时提出的抑制颤振方法的正确性,这对有效抑制颤振的发生具有重要意义[8]。
弹性刀架系统受到的简谐作用力的形式为:
系统的动力学模型为:

其位移响应为:

其中A为位移幅值向量,θ为简谐力的激振频率,φ为相位角。
对弹性刀架系统抬刀架的前端分别沿着X、Y、Z三个方向分别施加1.2N、2.7N、1.5N的作用力,频率范围为0~5000Hz,载荷步子为50步,然后进行谐响应分析。如图5所示,即为弹性刀架系统沿X、Y、Z三个方向的谐响应曲线。
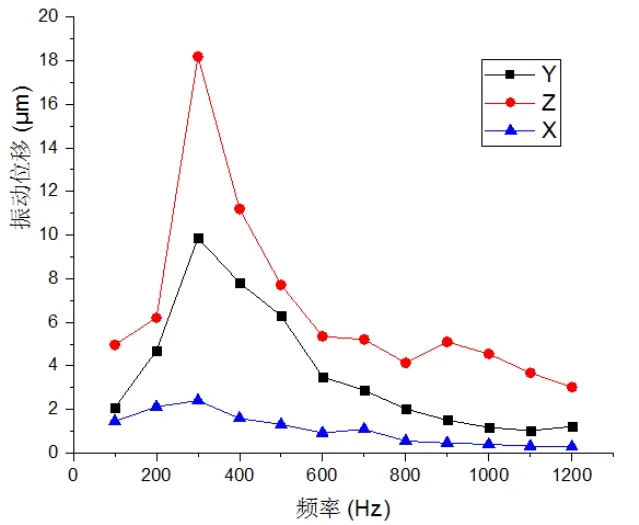
图5 弹性刀架频率-位移响应曲线
由图5可知,弹性刀架在1~6阶模态固有频率处均产生相应的响应,在0~350Hz之间Y、Z轴三向响应位移呈现急剧增大的趋势,弹性刀架发生明显振动,且最大振幅为Y向:9.3μm,Z向:18.5μm,而X轴方向的位移响应并不明显,最大振幅为2.4μm,这与弹性刀架系统1阶、2阶模态响应基本保持一致。当激振频率从350Hz增加到950Hz时,X、Y、Z三向响应位移明显降低,950Hz之后,弹性刀架的位移响应趋于稳定,振动明显减小。通过以上分析可知,弹性刀架2阶、3阶固有频率对系统的动态特性影响最大,因此,为了提高弹性刀架系统的抗振性,抑制颤振的发生,应该尽量避开2阶、3阶模态所对应的固有频率,这也验证了模态分析时提出的抑制颤振方法的正确性。
4 结论
本文对机械刻划弹性刀架的振动问题进行了分析,得到结论如下:
1)采用直接求解法对弹性刀架进行动态特性分析,获得弹性刀架系统的1~6阶模态的固有频率和振型,各阶模态的固有频率均大于刻划装置驱动电机频率,机械刻划时不会发生共振破坏,验证了弹性刀架结构设计的合理性。并且得到了机械刻划时弹性刀架容易发生颤振的位置,分析出在进行机械刻划时,为保证光栅槽形质量应该尽量避开的工作频率范围(236.27Hz~889.26Hz)。
2)在模态分析的基础上,对弹性刀架做了谐响应分析,得到了弹性刀架在机械刻划力作用下沿X、Y、Z三个方向的振动位移特性曲线,验证了提出的抑制弹性刀架颤振发生的方法的正确性。这为提高机械刻划时弹性刀架的稳定性,有效抑制颤振的发生,保证光栅刻划成槽质量提供了理论支持。
参考文献:
[1]刘莉.光栅应用发展现状[J].长沙大学学报,2009,23(5):23-27.
[2]石广丰,田在祺,史国权,郭云霞.衍射光栅机械刻划成槽过程中的应力拓扑分析[J].制造业自动化,2017,39(1):13-17,35.
[3]巴音贺希格,高键翔,齐向东.机械刻划长焦距.凹面金属光栅的研制[J].光学精密工程,2006,(03):391-395.
[4]石广丰,吕杨杨,史国权,吉日嘎兰图,肖为.光栅机械刻划摩擦型颤振机理[J].光学精密工程,2014,22(11):3061-3066.
[5]陈科位,于宏柱,张善文,等.大型衍射光栅刻划机刀架系统的设计[J].光学精密工程,2013,(11):2900-2905.
[6]张海波,张瑞军,常影.基于ANSYS的汽车悬架控制臂有限元分析[J].组合机床与自动化加工技术,2014,(3):150-151,155.
[7]刘涛,王卫辉,鹿飞,袁仁武.基于Workbench的箱形伸缩臂模态及谐响应分析[J].制造业自动化,2015,37(04):80-82,97.
[8]马春生,李俊帅,李瑞琴,胡洋. 新型龙门式混联机床主体机构的动态特性分析[J].组合机床与自动化加工技术,2017,(2):11-13,17.
