复杂环境下旋转式变向管道清洗机器人及转向技术研究
2018-05-25孟宪宇,董华伦,俞凯雄
0 引言
随着社会的发展,天然气管道以及各种输送管道的应用越来越多。而在使用的过程中管道内的粉尘,碎屑物质的积累会使得管道的输送成本提高,输送效率降低。人为清理管道成本高,而且工序复杂。因此使用小型机器人实现自动化清理管道便成为最经济,合理的选择。我国的天然气输送管道的直径一般在426mm~720mm。由于粉尘与碎屑黏附在管道内径表面会导致内径的不均匀变化,并且在某些地段有90°直角管道。因此针对这些现实情况目前国内外研究人员都提出许多有价值的方案。Thes系列轮式管道机器人就是由东京工业大学研发的[1],哈尔滨工业大学邓全宗开发了针对海底管道的六轮驱动式机器人[2],韩国的CHOI也研制出了MRINSPECT系列的多关节轮式小车[3]。因此由以往文献可知,目前的管道清洗机器人以履带、轮子实现在管道中的移动的居多数。但是针对直角管道的转向问题却未有充分研究,因此转向技术仍有缺陷,并且市场尚不成熟。
针对目前管道清洗机器人存在的缺点,基于基本的机械原理[4]和设计[5],运用CAD软件进行仿真模拟,并通过参数分析,设计出了一种新型履带式管道清洗机器人。此机器人可实现在大范围内径变化范围较大的管道的通行,并且能顺利通过90°管道以及丁字形等复杂管道;同时可以在有淤泥及光滑的管道内实现无障碍行进;并且机器人可以实现在垂直方向的爬行运动。
1 机器人主体结构
本机器人主体由行走机构、旋转机构和清洗机构组成,三维结构示意图如图1所示。
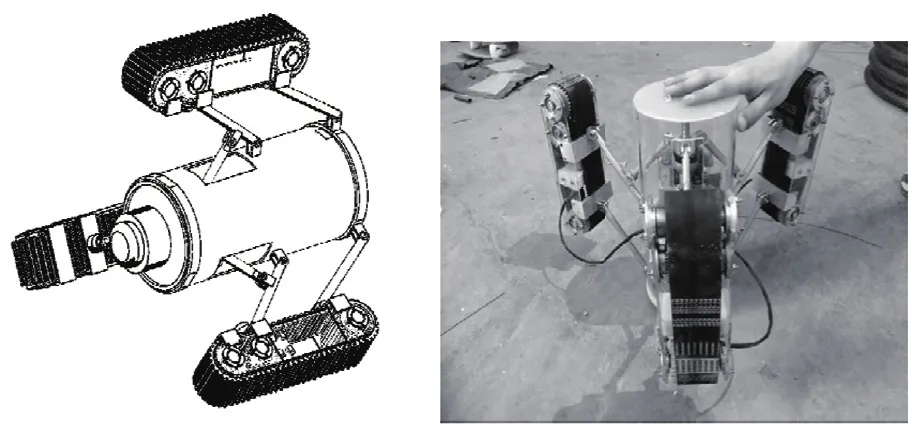
图1 机器人三维示意图及实物图
本机构初步设计目标是为在天然气及输送管道中行走除污。为了适应不管道内径不均匀变化的情况,采用伞状伸缩结构,易于对机腿进行伸缩变换;同时为了使机器人在管道中无障碍行走、越障爬行以及转向,使用三个减速电机为行走机构提供行进动力;一个减速电机为旋转丝杠提供动力,通过旋转丝杠实现伞状结构伸缩;一个减速电机为机体后盖旋转提供动力,实现转向运动。
1.1 行走机构
本机器人,为实现履带与管壁的紧密贴合,三组完全相同的履带行走机构呈120°对称分布在机身主体外架上。行走机构三维示意图如图2所示。
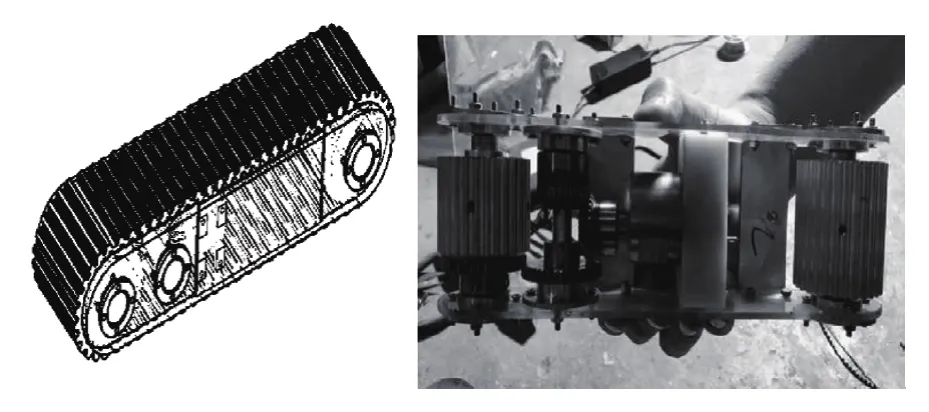
图2 行走结构三维示意图及实物图
为确保行走机构在管道中有足够的动力行进并且摩擦力适当,并且在机器人处于垂直攀爬时,管道内径对机器人的摩擦力可以支撑机器人本生的重力。对于履带外形尺寸参数的设计需要严谨合理的推导计算。
首先,因为履带的宽窄与摩擦力有密切关系。如果履带较窄,它的行进时摩擦力小及所提供的行进动力就小;若履带太宽时,贴壁效果不明显,提供的摩擦力就小。因此利用CAD作图,如图3所示的模拟的方法分析。
设履带宽为d。
为了达到更好的贴壁效果:
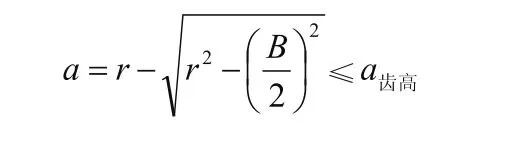
a为履带的齿高,取10mm;
选取履带的宽度为:B=150mm。
然后,分析履带的长度。因为履带的长度与转弯的性能有关,若履带的长度大时,会有更大的摩擦力作用于机器人,需要大功率的电机带动履带运动,对电源的要求较高;在弯道转弯时不易贴紧管道内表面,容易产生打滑现象。所以履带的长度也不能太长。
同时L/B如果太大,会增大转向阻力,增大转向功率,加大转向困难;L/B如果太小,会影响机器人行驶稳定性[6]:
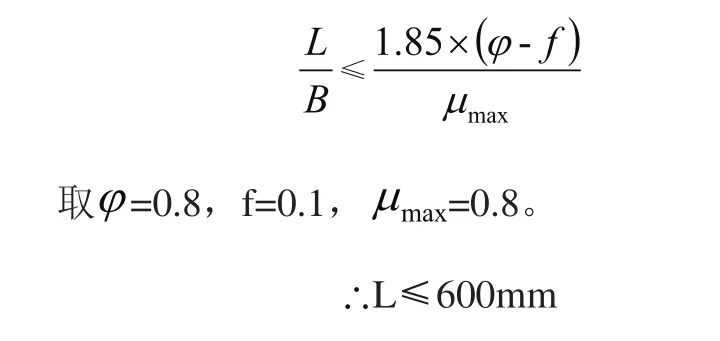
故选取履带的长度为:L=580mm。
最后,分析履带的高度。因为履带的高度受管道直径的制约,同时还受伞状撑开杆结构的影响;由于伞状撑开杆结构要能在直径为400mm~1000mm范围管道内变化,并且杆长要达到给定的范围。故通过对撑开杆组的分析设计,最终确定履带的高度H=175mm。
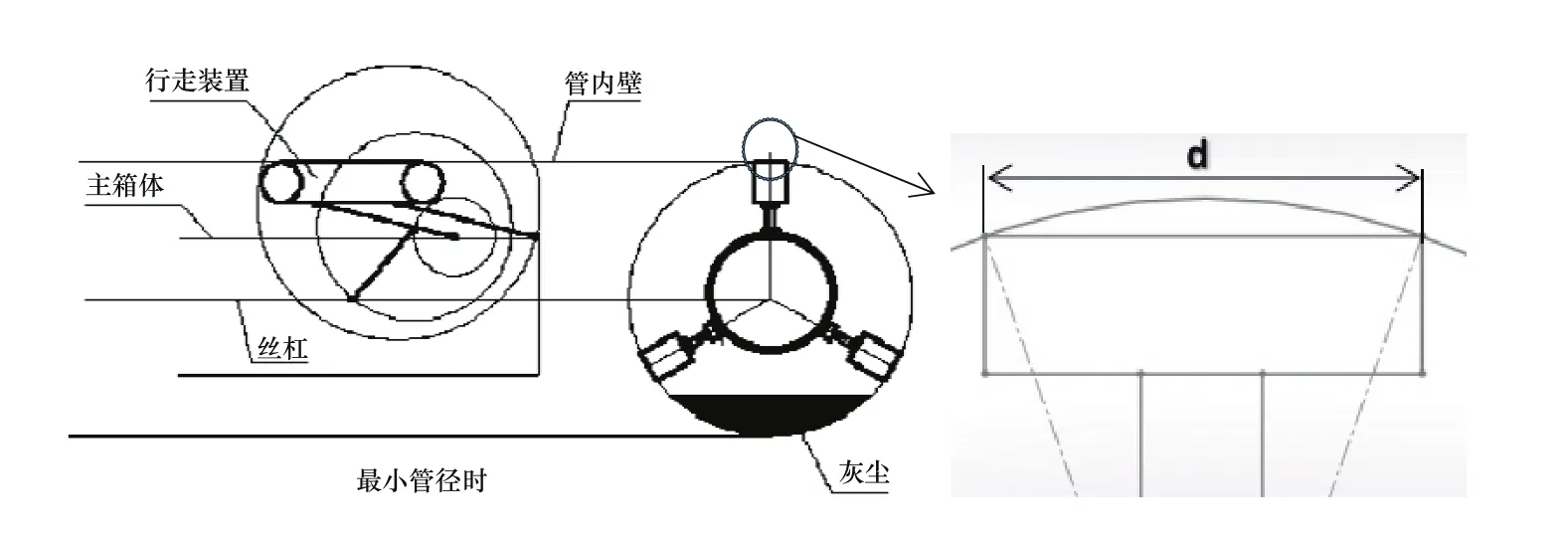
图3 CAD模拟图
1.2 旋转机构
该机器人旋转机构由内部丝杠旋转机构和外部旋转机构。
内部丝杠结构通过电机带动丝杠旋转实现机腿的伸缩,从而实现伞状结构的张合。其运用丝杠和螺母结构,将回转运动转变为直线运动;推动机腿的伸缩,使机器人适应不同管径。滚珠丝杠机构相对于齿轮齿条结构具有更高的精确度,在竖直管道行进作业中压力的微小变化就有可能使机器人打滑甚至摔毁,所以选择丝杠机构。结构如图4所示。
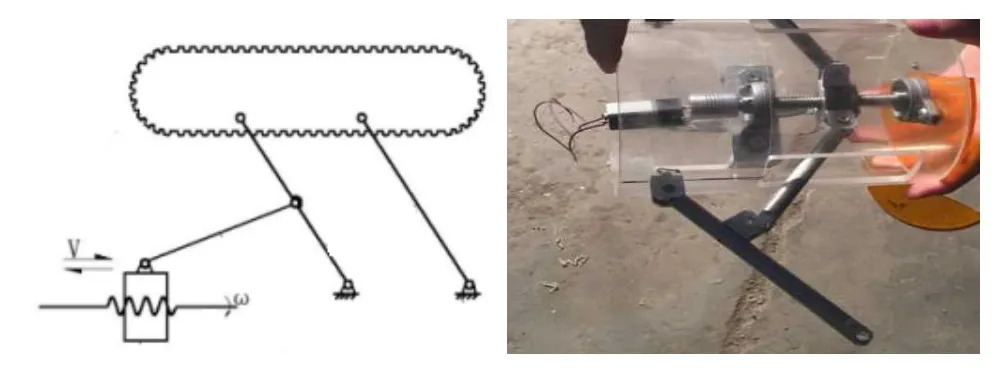
图4 丝杠旋转机构CAD图及实物图
外部旋转结构通过电机带动机体后盖旋转改变行走机构的角度,通过行走机构在管道中旋转行进从而实现机器人弯道转向。打破了常规的轮式转向的不顺畅的缺点,实现弯道流畅转向。如图5所示。
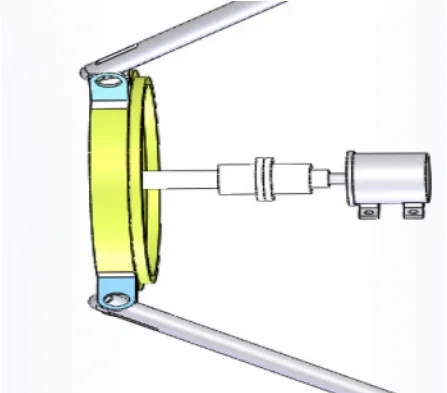
图5 外部旋转结构
1.3 清洗机构
清洗机构是采用高压喷头清洗,高压喷头采用圆锥形状,在使用过程中通过喷嘴内孔横截面的收缩,将高压的液体和空气在喷嘴中聚集起来然后急速喷出,产生高冲击力的水流从外侧喷出,喷头在压力的作用下不断抖动,从而清洗掉管道内的大部分淤泥等杂质。如图6所示。
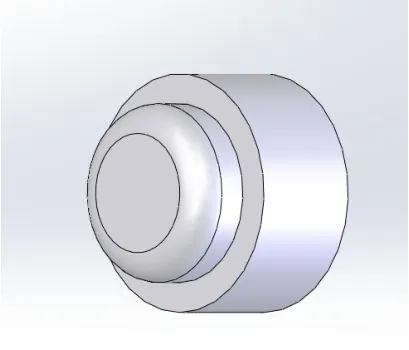
图6 高压喷头
2 机器人动力机构
2.1 电机选取
该机器人受力如图7所示,预取:
由于三履带呈120°分布:

(μ为橡胶与钢材之间的摩擦系数)
假设清洗机器人最大速度为0.5m/s:
故选取功率为200w的电机。
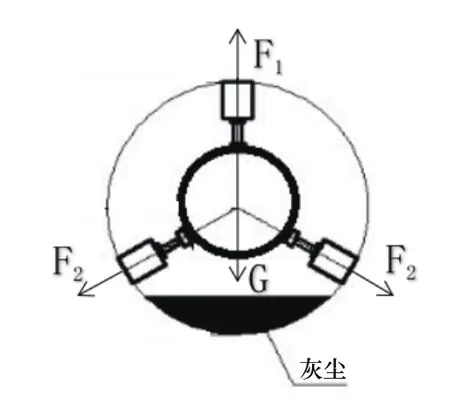
图7 机器人受力图
2.2 电源选取
考虑到管道内径变化比较复杂,大部分情况又是在野外作业,需要机器人要有自带的供电系统,有较为灵活的运动能力,并且工作连续时长越长越好。因此在电源的选取上需要重量轻,体积小,并且电量大的供电电源。根据机器人电机的电压和电路板电压的要求,再结合实际市场上可选择的情况,选择由3.7V单体锂电池组成的锂电池组,其具有电压可自主装配调节,并且价格低廉。
3 机器人控制系统
由于考虑到机器人的供电电量有限,且机器人的电机控制系统不宜选用复杂系统,因此机器人控制系统选用PWM脉宽调制调速系统。该系统是对于直流电机无极调速最优化的调速系统。PWM调速系统可调节频带宽,电流脉动小,电源功率因素高级,电机动态硬度好,而且技术已经非常成熟,使用普通的芯片和电路系统即可实现其功能。
本机器人的控制系统分为行走机构控制、丝杠旋转机构控制及外部旋转机构控制。每个控制系统独力地由一个PWM脉宽调节器控制。行走机构要求控制系统能够统一控制三个电机,从而在脉冲作用下实现同步前行,并且通过调制PWM波就能够实现机器人在行走速度上的控制。丝杠旋转机构控制通过单一电调发射脉冲信号,实现电机带动丝杠旋转进行正反转,从而实现伞状结构的张开闭合,同理也能通过PWM波的调节实现伞状结构运动速度的调节。外部旋转机构通过单一电调发射脉冲信号,实现角度旋转,从而转向。
4 机器人定位系统
如果机器人在清洗过程中遇到严重阻塞,需人工处理时,需要对管道中机器人的定位来确定管道阻塞位置。虽然管道是封闭的,但路径是固定的,因此可仿照出租车里程系统计算出行进里程[7],而后通过里程和管道路线对比来判断机器人的具体位置,从而快速精确地判断出阻塞严重的位置,来实施人工清污。
5 弯道转向技术分析
机器人转向过程,假设:
1)机器人履带与管道无缝贴合;
2)单根履带与管道的接触处摩擦力处处相同;
3)空气阻力、传动机构间内阻力、履带与驱动轮间的内阻力忽略不计。
该机器人转向的实现,是通过尾部后盖的旋转带动行走机构尾部的的转向,通过机器人行走机构与主体呈一定的角度螺旋式行进,从而顺滑地通过弯道。现对转向所需功率做分析:

图8 机器人管道对比图
取前支撑杆到后支撑杆的距离为S=500mm。

可近似看作:
同理计算出:
尾盖的直径为:
故电动机功率为:

外部旋转机构实际电机功率足够带动尾部旋转。
尾部机构旋转角度越大,越容易实现弯道螺旋式行进。
设尾部旋转最大角度为θ时;
撑开杆组尾部支撑杆要下降
同时转动
因为撑开杆组为平行四边形机构,所以将带动行走机构尾部下降h,同时转动β;
而对应的行走机构前部将向上移动
将额外产生
σ为橡胶的许用应力。
又因此时电机产生的功率
得出此时旋转最大角度θ≤10°。
为了保障旋转时伞状撑开杆组的安全使用,平行四边形机构转向角度取5°~10°。
6 结论
本文在设计管道清洗机器人过程中通过文献查阅,网络搜索了解到管道机器人的应用场地,总结各种管道机器人的优缺点,了解到市场上管道清洗机器人弯道转向的不足,侧重于优化弯道转向的技术。创新出螺旋式弯道转向技术,打破常规弯道转型不灵活的特点,实现弯道无阻流畅转向。机器人的另一个创新点在于利用伞状结构,更好地适用于不同直径的管道以及不同用途的管道作业要求,使机器人可以应用于多种工作情况,使得机器人有更为广阔的运用前景。
参考文献:
[1]IWASHINA S, HAYASHI I, IWATSUKI N,et al.Development
【】【】of In-Pipe operation micro robots[A].Proceeding International Symposium on Micro Machine and Human Science[C].Oct.2-4,1994, Nagoya, Japan. Nagoya:IEEE, 1994:41-45.
[2]邓宗全,陈军,姜生元,等.六独立轮驱动管内检测牵引机器人[J].机械工程学报,2005,41(9):67-72.
[3]CHOI H R, RYEW S M. Robotic system with active steering capability for internal inspection of urban gas pipelines[J].Mechatronics,2002,12(5):713-736.
[4]孙桓.机械原理[M].高等教育出版社,2006.
[5]濮良贵.机械设计[M].高等教育出版社,2006.
[6]陈泽宇,郭秀红,张承宁.接地长宽比的设计对履带车辆行驶性能的影响[J].农机化研究,2010,05(006):112-114.
[7]刘伟明.浆液下机器人定位功能实现[J].传感器与微系统,2007,08(025):96-98.
