无控制点数据的数字正射影像图制作
2018-04-24王贤,江虹
王 贤,江 虹
(西南科技大学信息工程学院,四川 绵阳 621010)
0 引言
无人机(unmanned aerial vehicle,UAV)航测以其反应灵敏、机体轻便等特性,成为低空遥感领域一种重要的监测手段[1-3]。无人机采集的影像资料通常受地形起伏、大气折射或相机倾斜等因素的影响,使影像上的地物信息产生不同程度的畸变现象。数字正射影像图(digital orthophoto map,DOM)消除了原始影像上的几何形变,是一种统一影像上各比例尺的一种新型地形图[4]。由于DOM具有内容丰富、信息直观等优点,而被广泛应用于环境保护、资源监测等领域。因此,如何快速、高效地制作DOM已成为航空摄影测量的主要任务。传统的摄影测量作业模式,需要人工在测区均匀布设具有明显地形特征的控制点,再通过空三加密的方法求得影像的外方位元素,这势必会增加外业作业量[5]。而对于急流、高原等人类涉足困难的地区,不仅难以布控正确的地面控制点,还会额外增加外业测定成本,使得成图工序过于复杂化。因此,如何取代人工布设地面控制点,直接获取影像的外方位元素,已成为航空摄影测量中一个亟待解决的问题。
20世纪八十年代,全球定位系统(global positioning system,GPS)应用于摄影测量工作,使得DOM制作所需要的控制点大量减少,并且可以提供相机的位置参数。但该方法仍需少量地面控制点,通过空三加密获取影像外方位角元素。近年来,随着计算机和通信技术的高度集成,GPS差分定位技术和惯性导航技术的迅速发展[6],定位定向系统(position and orientation system,POS)组合系统为航空摄影测量的数据采集提供了新的获取手段,它可以直接提供影像的外方位元素[7]。POS应用于摄影测量,使得无控制点制作数字正射影像成为可能。一些相关研究人员为了减少或消除航空摄影测量对控制点的依赖,也在软件研究[8-9]、平差优化[10]、质量检查[11-12]等方面进行了大量试验和分析。
为了解决传统DOM制作严重依赖地面控制点的问题,本文采用多旋翼小型无人机作为低空飞行平台。它搭载SonyA7相机,以不同角度、不同时间拍摄了高清晰度的低空影像。结合POS直接记录的辅助数据及Inpho影像处理软件,对无人机影像的纠正处理进行了分析。与传统方法相比,本方案可以有效减少外业采集成本,简化DOM成图工序。
1 测区基本情况
本次试验于2016年10月28日在广东佛山进行。当日天气多云雾,空气湿度较大,风力小于3级。飞行地区几乎无较大地面起伏,平均飞行高度设计为170 m。航摄区域有房屋、植被、河塘、农作物、道路、高压线路等。
2 影像资料与无人机姿态参数的获取
2.1 飞行平台与传感器性能参数
本文采用的低空飞行平台,是一款无需专业操控手全程自动化的小型无人机,只要输入比例尺大小、飞行航线、相机参数等,即可自动按照航线飞行。它自身
带有弹射起飞系统,无需下滑道,可通过开伞方式降落。在带有相机负载情况下,无人机质量约4 kg;相比2 kg以下的无人机,姿态更加平稳,比大型飞机操作更加简便,并且续航时间超过 1 h,一次作业的飞行距离可达到60 km以上。无人机遥感平台及传感器的主要性能参数分别如表1和表2所示。
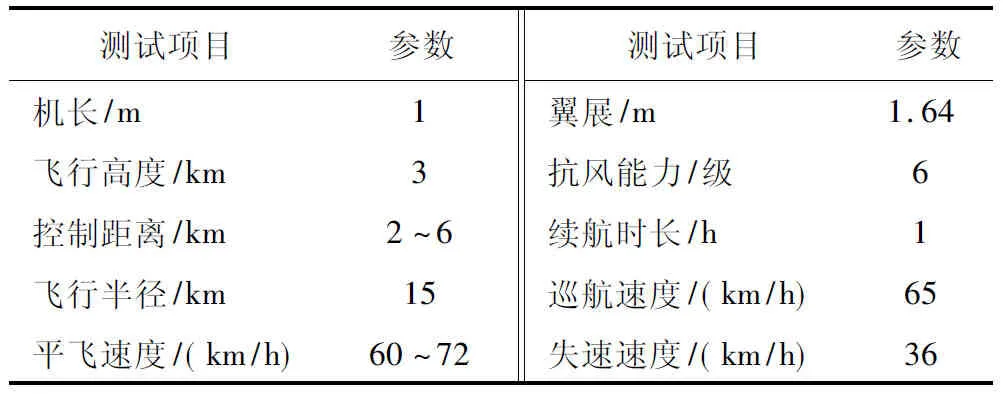
表1 飞行平台主要性能指标Tab.1 Main performance indexes of the platform

表2 传感器主要性能指标Tab.2 Main performance indexes of the sensor
2.2 数据分析
2.2.1 影像资料的获取
无人机进入航摄区域进行影像自动拍摄,预设影像的航向重叠为75%~80%左右,旁向重叠预设为30%左右,平均航高大致为170 m。在外业航拍工作结束后,导出影像资料和POS数据,共得到223张影像,其大小约为2.4 GB。对航摄数据的航向、旁向重叠度、飞行航高、航向弯曲、影像旋角等各项指标进行检查。结果表明,影像数据结果良好,各项参数均符合摄影测量要求。
2.2.2 POS记录的辅助数据
当无人机在数据采集地区进行航飞时,每隔2 s拍摄一副影像,无人机会记录下相机在曝光时刻对应的单张影像。GPS获取到曝光时刻无人机的空间位置数据(纬度、经度、高程),惯性测量单元记录下该时刻无人机的空间姿态数据,即滚转角(roll)、俯仰角(picth)和航偏角(heading)。记录数据如表3所示。

表3 记录数据Tab.3 The data of record
从记录数据来看,无人机飞行高度基本符合预设值。航拍区域大致处于N23°17′、E113°01′的位置。从谷歌地图中可以查询到,无人机的航拍区域位于广东省佛山市三水区乐平镇附近。
3 DOM快速制作
3.1 影像单张纠正
反解法数字微分纠正是如今影像纠正的主流方法,它能有效避免纠正后影像出现像点排列不规则的问题。由于无人机采集的影像资料小而多,为了高效、有序地进行影像纠正,本文将正解法和反解法数字微分纠正相结合以处理影像资料,达到正射纠正的目的。
①采用正解法数字微分纠正,以共线条件方程式为基础,计算出原图上的四个顶角像点p(x,y)对应纠正后的三维坐标(X,Y,Z)。通过正射图像的四个角点坐标,即可得到纠正后的正射影像范围大小:
(1)
式中:X、Y、Z为原图像的四个顶点对应纠正后的三维坐标;f为摄影轴中心到影像的主距;ai、bi、ci(i=1,2,3)为方向余弦,可由POS系统记录的数据求得。
②利用反解法逐个计算像点在原图上的位置坐标。设纠正后的图像上任一像素中心点P的坐标值为(X′,Y′),其左下角对应的地面坐标为(X0,Y0)。同时,取该正射影像的比例尺分母为M,则像点P在地面的对应坐标(X,Y)为:
(2)
③共线条件方程式是航空影像进行正射纠正的基础。根据无人机系统提供的影像内方位元素x0、y0、f及POS组合系统记录的位置和姿态数据(影像的外方位元素),导入数字高程模型(digital elevation model,DEM),即可计算像点P在原航空影像上的对应坐标p(x,y)。
④由于步骤③求得的像点坐标可能不在原航片的某像素中心上,无法直接读出此像点的灰度值,所以采取双线性内插方式,获取到像点p处的灰度值g(x,y),最后将其赋给像点P。
G(x,y)=g(x,y)
(3)
3.2 平差解算外方位元素
传统航空摄影测量采取光束法区域网平差,以单张影像上控制点为基础,从共线条件方程式出发,计算外方位元素。本文在无控制点情况下,以最小二乘平差为基础,构造目标函数,使得所有像点残差平方和最小;然后采用最速下降法迭代求解影像外方位元素。
3.3 影像拼接
根据纠正后的影像上各个像点的坐标关系,将单张影像拼接起来。采用Inpho软件中的OrthoVisa功能模块,对拼接后的影像进行匀光匀色。由拼接之后的正射影像可以看出,经过纠正的正射影像整体上基本消除了原始航片的投影误差,拼接处衔接较好;经目视检查,无明显错位、边角无明显变形。
4 精度检查
由于GPS本身精度不高的特性,所以将野外实测控制点坐标与屏幕坐标进行对比的方法意义不大。在Google Earth软件中的搜索栏查找无人机记录的经纬度数据,以便进行精确定位。然后将纠正后的正射影像与矢量文件进行匹配检查,调节透明度,得到无人机拼接影像与矢量文件叠加效果图。影像中道路、河塘等重叠度较高,无明显畸变和错位现象,说明本文提出正射影像图制作方法效果较好,可以满足后续的应用。
5 结束语
POS直接对地定位是集机载GPS与惯性测量单元于一体的新型航摄技术,它可以直接提供影像定向参数,突破了传统摄影测量必须进行空中加密的限制。本文采用POS辅助低空摄影测量,可以提高DOM成图速度、降低野外工作成本,从而有效解决需要到测区布设大量地面控制点的问题,简化了成图的工业流程。
本文采取一维搜索与最速下降法联合平差方式。虽然成图速度有明显优势,但是容易陷入局部最优解。因此,找到一种既能满足成图速度要求,又能得到全局最优解的平差方法,将是下一步需要改进和努力的方向。
参考文献:
[1] 陈天博,胡卓玮,魏铼,等.无人机遥感数据处理与滑坡信息提取[J].地球信息科学学报,2017,19(5):692-701.
[2] 梁爽.固定翼无人机定点飞行最优路径选择[J].自动化仪表,2016,37(5):13-15.
[3] WANG K,FENG W,WANG T,et al.Application research on UAV data fast mapping technology based on songshan calibration field[J].Engineering of Surveying & Mapping,2017,26(3):37-41.
[4] 杨浩.基于机载LiDAR点云的真正射影像生成方法研究[D].绵阳:中国工程物理研究院,2015.
[5] 张雪萍.POS辅助航空摄影测量直接对地目标定位的关键技术研究[D].武汉:武汉大学,2010.
[6] 孟祥萍,寇磊,苑全德,等.GPS/INS组合导航在输电线路巡检中的应用[J].自动化仪表,2016,37(12):54-57.
[7] 赵政,凌霄,孙长奎,等.基于POS的无人机倾斜影像匹配方
法[J].国土资源遥感,2016,28(1):87-92.
[8] SHI P,LU D,SHEN Y.Comparison between inpho and photomod used to generate digital orthophoto maps from images of UAV[J].Urban Geotechnical Investigation & Surveying,2016,31(3):79-82.
[9] 金鼎坚,支晓栋,王建超,等.面向地质灾害调查的无人机遥感影像处理软件比较[J].国土资源遥感,2016,28(1):183-189.
[10]王密,杨博,李德仁,等.资源三号全国无控制整体区域网平差关键技术及应用[J].武汉大学学报(信息科学版),2017,42(4):427-433.
[11]曹明兰,薄志毅,李亚东.无控制点数据的无人机影像DOM快速制作[J].测绘通报,2016,62(8):35-38.
[12]韩晓庆,刘佳,李静,等.海岸带地区SPOT-5遥感影像无控制点正射校正方法[J].测绘科学,2013,38(3):121-124.
