KCCA-DPLS分布式建模算法研究
2018-04-23姚莉娟
姚莉娟
(苏州高等职业技术学校机电工程系,江苏 苏州 215011)
0 引言
随着现代工业的不断发展,生产过程复杂程度逐步加深,系统建模方法越来越多样化。集中式建模控制方法[1-3]考虑了系统的整体性,但会出现模型结构相对复杂、模型精度难以保证和计算繁琐等诸多问题。分散式建模方法降低了模型的复杂度[4-5],但由于其没有考虑到各子系统间的相互作用,系统的全局性无法得到满足,分布式建模方法能较好地克服这些问题。本文提出了一种基于核典型相关分析(nuclear canonical correlation analysis,KCCA)和动态偏最小二乘(dynamic partial least squares,DPLS)的分布式建模方法。
胡蓓蓓等[6]提出了一种基于典型相关分析(canonical correlation analysis,CCA)[7]的系统分解方法。在分解过程中,该方法考虑了变量之间的关联性。但该方法只针对线性系统。由于目前实际工业过程以非线性为主,所以本文采用KCCA对系统进行分解。分解前,将非线性过程线性化,分解后的子系统有多种建模方式。赵曌[8]采用偏最小二乘(partial least squares,PLS)进行建模,能够降低大系统的维数,消除共线性。然而PLS只是纯代数结构,无法应对实际工业过程中的动态性能。为了满足动态系统的模型精度要求,更真实地描述系统的动态性能,本文采用DPLS方法[9]。该方法对分解后的关联子系统进行动态建模,降低了系统的建模难度,同时提高了建模精度。
1 分布式建模算法描述
1.1 KCCA算法原理
KCCA是一种非线性数据分析算法[10-11]。数据集通过核函数进行隐式非线性映射,将输入空间的非线性关系转化为特征空间的线性关系,并通过核函数在核函数空间进行关联分析。KCCA具有很强的线性拟合能力,其原理如图1所示。
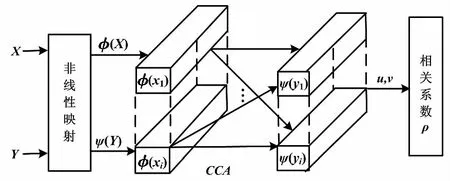
图1 KCCA原理图 Fig.1 Principle of KCCA
图1中:φ(X)和φ(Y)分别为随机变量组X和Y通过核函数,从观测空间R映射到高维特征空间F的隐式映射。
(1)
则核函数为:
K(X,Y)=[φ(X),ψ(Y)]
(2)
建立线性CCA模型:
u=cTφ(X)
v=dTψ(Y)
(3)
式中:cT和dT为两组投影向量,使得u和v的相关系数达到最大。


(4)
(5)
分别利用Lagrangian函数对c和d进行求导,可得:
(6)
式中:α和β分别为与高维空间中的权重c和d相对应的权重。
将式(6)代入式(3),可得:
(7)
分别计算u和v的方差和协方差:
(8)
最后可以得到相关系数ρ:
(9)
式中:Kx=XXT;Ky=YYT。
使相关系数ρ达到最大值,求解如下优化问题:
(10)
根据Lagrangian函数,可得:
(11)
分别对α、β进行求导,可得:
(12)
由上式可得λ=λα=λβ,引入核函数后,得:
(13)
即:

(14)
令:
式(14)可化简为:
B-1Aw=λw
(15)
只需求解B-1A的最大特征值λmax,即可得到α、β以及相关系数ρ。
1.2 DPLS建模算法原理
通过将ARX动态模型应用到PLS内模型的动态描述中,系统的输入和输出变量之间采用动态回归的方式,形成一种动态建模算法。PLS内部模型采用的动态ARX模型形式为:
y=H(t)
(16)
DPLS建模流程如图2所示。

图2 DPLS建模流程图 Fig.2 DPLS modeling process
图2中:Wx和Wy为PLS建模之前的对角缩放矩阵;R为映射矩阵,将原始变量X转换成得分向量t;Q为u的负载矩阵。
DPLS模型为:
(17)
系统的优化目标函数为:
(18)

将N转化为隐空间的优化目标函数:
(19)
式中:u(k)为k时刻隐变量空间中的实际输出;uDPLS(k)为ARX-PLS内模型的输出。
uDPLS=φ(k)θ(k)
(20)
φ(k)=[u(k-1),u(k-2),…,u(k-n),
t(k-1),t(k-2),…,t(k-m)]
θ(k)=[-a1(k),-a2(k),…,-an(k),
-b1(k),-b2(k),…,-bm(k)]T
(21)
式中:t(k)为当前时刻对应的输入;φ(k)为输入和输出的当前及前一段时刻的信息;m和n为输入向量、输出向量维数;θ(k)为k时刻所建ARX模型的系统回归参数。
将θ(k)代入式(18)中,可得优化目标函数为:
(22)
利用最小二乘(least squares,LS)辨识方法,可得:
θ(k)=[φT(k)φ(k)]-1φT(k)u(k)
(23)
将变量投影到PLS隐空间,逆矩阵求解时的病态问题得到了消除。
然后通过将内模型的输出投影到原始空间,确定原始空间内系统的模型辨识误差是否超过了允许的阈值ε,即:
(24)


uDPLS(k)QT]≤ε
(25)
当输出误差超过了允许范围(即E>ε),则辨识过程被重新启动,直到输出误差E≤ε。
模型更新流程如图3所示。
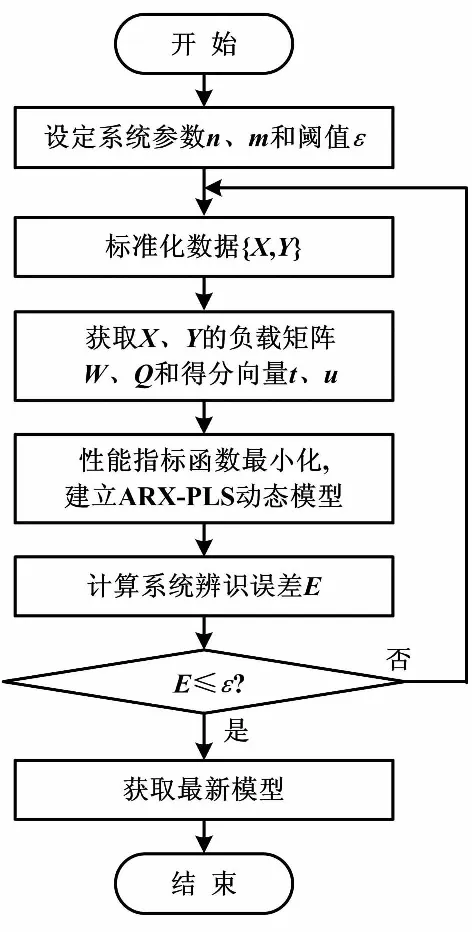
图3 模型更新流程图 Fig.3 Process of model updating
2 算法流程
KCCA和DPLS的分布式建模算法分为两个阶段:基于KCCA的非线性大系统分解和基于DPLS的各子系统动态建模。算法流程如下。
①分析工业过程质量指标,选择与质量指标密切相关的关键变量作为输入、输出变量,采集相应的数据得到输入变量集X和输出变量集Y。
②对输入输出数据{X,Y}进行归一化处理,利用KCCA方法得到各输入变量、输出变量间的权值系数ρ。
③设定门槛值ζi和ζj,选择ρ大于等于门槛值ζi的输入变量为子系统的独立输入变量,小于ζi且大于等于ζj的作为子系统的相互作用输入变量,对大系统进行划分,得到若干子系统。
④根据所分解后的子系统相应的输入输出变量,对每个子系统收集输入输出数据集{Xi,Yi},采用ARX-PLS方法建模。
⑤确定原始空间内系统的模型辨识误差E是否超过了允许的阈值ε。若在允许范围内,则建模结束,否则返回步骤④。
根据上述步骤,得到基于KCCA和DPLS的分布式建模算法的基本结构如图4所示。
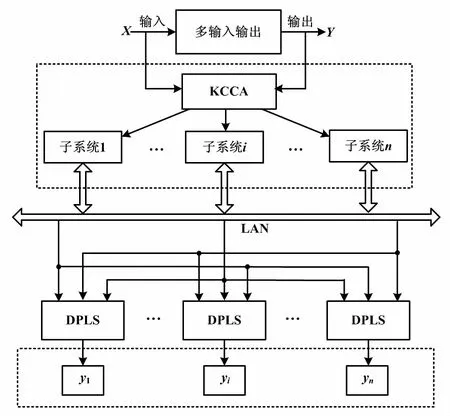
图4 分布式建模算法结构图 Fig.4 Structure of distributed modeling algorithm
3 试验仿真
田纳西-伊士曼(Tennessee-Eastman,TE)化工过程是一个基于实际化工过程的仿真模拟[11],它满足工业过程的非线性特点。TE过程由反应器、冷凝器、气液分离器、汽提塔、循环压缩机5个操作单元组成。4种气态物进料分别为A、C、D和E(C中含有少量惰性气体B),经反应后生成G、H两种主产物和副产品F。反应方程式如下:
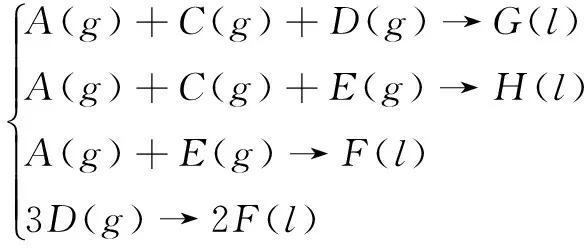
(26)
整个TE过程分为反应器温度、气液分离器温度、G/H产率比3个子系统,相应的输出变量分别为反应器温度、气液分离器温度、G/H产率比。采用KCCA方法对上述过程进行系统分解。对所有变量数据,采用径向基函数(radial basis function,RBF)进行非线性映射:
(27)
所有的变量通过RBF函数映射到KCCA空间,利用CCA建立线性模型,然后计算每个输出变量与所有输入变量的最大相关系数以及对应某输入变量在特征提取时的权值系数。确定门槛值为0.5 和0.8,以此确定各子系统的变量。
采集的工业数据经处理后得到300个样本点,取其中前150个样本点作为建模训练数据,后150个作为模型测试数据。对每个子系统分别采用DPLS算法和传统PLS算法建立子模型进行比较。比较结果如图5~图7所示。AV为系统实际输出值;PV为预测输出值。
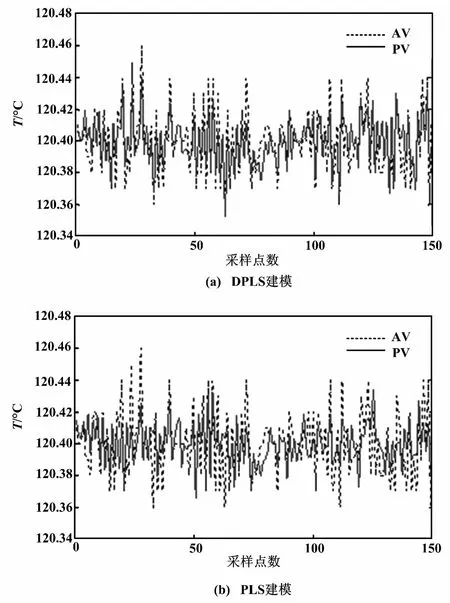
图5 反应器温度建模对比图 Fig.5 Comparison of reactor temperature modelings
采用均方根误差(root mean squared error,RMSE)和最大绝对误差(maximum absolute error,MAXE),描述两种建模方法的精度。
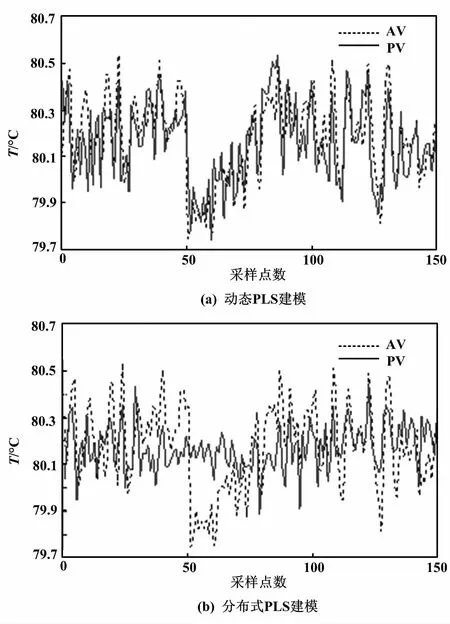
图6 分离器温度建模对比图 Fig.6 Comparison of separator temperature modelings
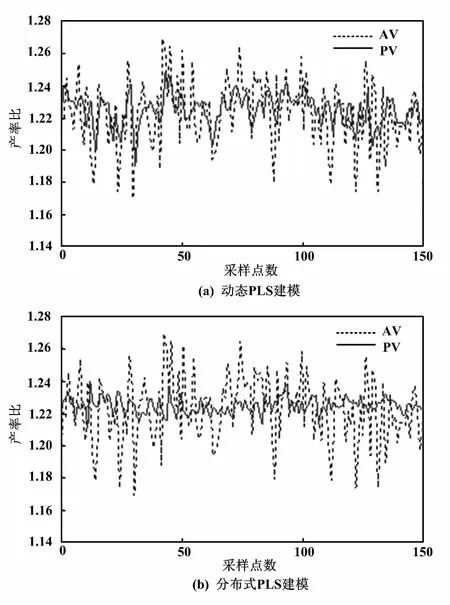
图7 G/H 产率比建模对比图 Fig.7 Comparison of G/H ratio modelings
(28)

(29)
式中:yi为测试样本的实际值;f(xi)为测试样本的模型预测值;n为测试样本数目。
RMSE、MAXE对比结果如表1所示。
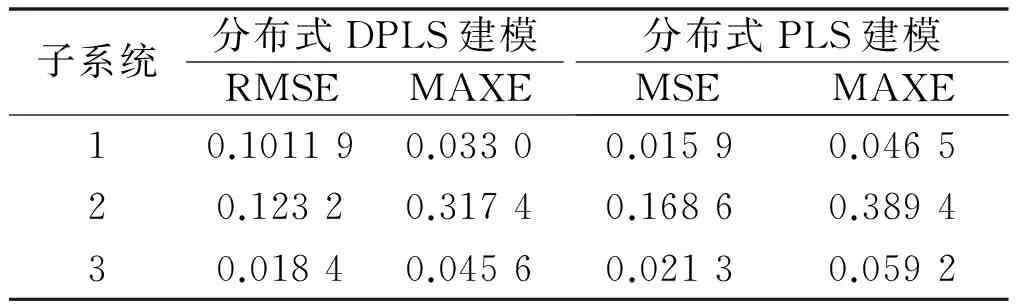
表1 RMSE、MAXE对比结果Tab.1 Comparison of RMSE、MAXE
传统的PLS建模虽然简化了模型结构,降低了计算难度,但这只是单纯的数据结构模型,无法适应实际工业过程的动态性能,所以仿真效果较差。从RMSE和MAXE两个性能指标的对比中可以看出,采用DPLS的分布式建模算法所建的模型精度更高。因此,分布式DPLS建模算法比传统PLS建模方法更有优势。
4 结束语
本文针对实际化工过程复杂多变、非线性强等特点,提出了一种KCCA和DPLS方法相结合的分布式建模算法。采用KCCA方法进行变量间的相关分析,将复杂的大系统分解为多个子系统。然后采用DPLS算法在隐空间得到子系统模型。通过对TE过程的仿真研究表明,所提出的算法降低了复杂大系统的模型维数,简化了模型结构,满足了非线性系统的模型需求,更好地适应模型的动态性能。同时,模型的精度也有了提高,系统的整体性能得到提升。但是本文对系统模型的稳定性还未作研究,这将是下一阶段的研究重点。
参考文献:
[1] RICCARDO SCATTOLINI.Architectures for distributed and hierarchical model predictive control-a review[J].Journal of Process Control,2009,19(5):723-731.
[2] RAVINDRA D,GUDI,AMES B.RAWLINGS.Identification for decentralized model predictive control[J].American Institute of Chemical Engineers,2006(52):2198-2210.
[3] BEN C,JURICE K,DALE E.Identificationof the tennessee eastman challenge process with subspace methods[J].Control Engineering Practice,2001,9(12):1337-1351.
[4] BRETT T.STEWAR T,ASWIN N,et al.Cooperative distributed model predictive control[J].Systems & Control Letters,2010,59(8):460-469.
[5] SAWADOGO S,FAYE R M,MALATERRE P,et al.Decentralized predictive controller for delivery canals[C]//Proceedings of the 1998 IEEE International on Systems,San Diego,USA,1998:3880-3884.
[6] 胡蓓蓓,李丽娟,熊路.基于相关分析与最小二乘支持向量机的TE过程多模型建模[J].计算机测量与控制,2015,23(1):60-63.
[7] 梁志平.多变量时间序列相关分析及建模预测研究[D].大连:大连理工大学,2010.
[8] 赵曌.基于PLS方法的建模及控制器设[D].杭州:浙江大学,2012.
[9] DONG Y N,QIN S.Dynamic-inner partial least squares for dynamic data modeling[J].IFAC-Papers On Line ,2015,48(8):117-122.
[10]李太福,易军,苏盈盈,等.基于KCCA虚假邻点判别的非线性变量选择[J].仪器仪表学报,2012,33(1):213-220.
[11]RICKER N L.Optimal teady-state operation of the Tennessee Eastman challenge process[J].Computers and Chemical Engineering,2005,19(9):949-959.
