基于预置区域数据表的自摆式大流量消防炮控制系统设计
2018-02-02邓成中
张 果,邓成中
(西华大学机械工程学院,四川 成都 610039)
随着科学技术的不断发展,应对火灾的措施也在不断改进。在燃料仓库、石油化工厂、垃圾堆放场等容易出现暗火、阴燃的半露天或全封闭的场所,现有自摆式消防炮常结合较复杂的机械传动结构来完成消防炮的自摆式运动,而较复杂的机械结构会使消防炮的可靠性降低。同时,对于依附程序控制来实现消防炮的自摆式运动来说,其使用效果不好,很难满足保护区域的消防安全要求[1]。
为此,本文设计了一种基于预置区域数据表的自摆式大流量消防炮控制系统。该系统根据保护区域的环境参数来编写预置数据表,进而依靠程序并结合大流量喷水的特点,控制消防炮的运动,自动调整射水角度。同时,在自摆式消防炮的自摆方式上进行了优化:消防人员可根据保护区域的现场情况调整相关参数,预防人员可根据保护区域的现场情况调整预置区域数据表参数库,从而达到良好的灭火效果。
1 系统总体设计及运动形式
1.1 系统总体结构
基于预置区域数据表的自摆式大流量消防炮控制系统的总体框图如图1所示。预置区域即为需要进行火灾安全保护的区域。
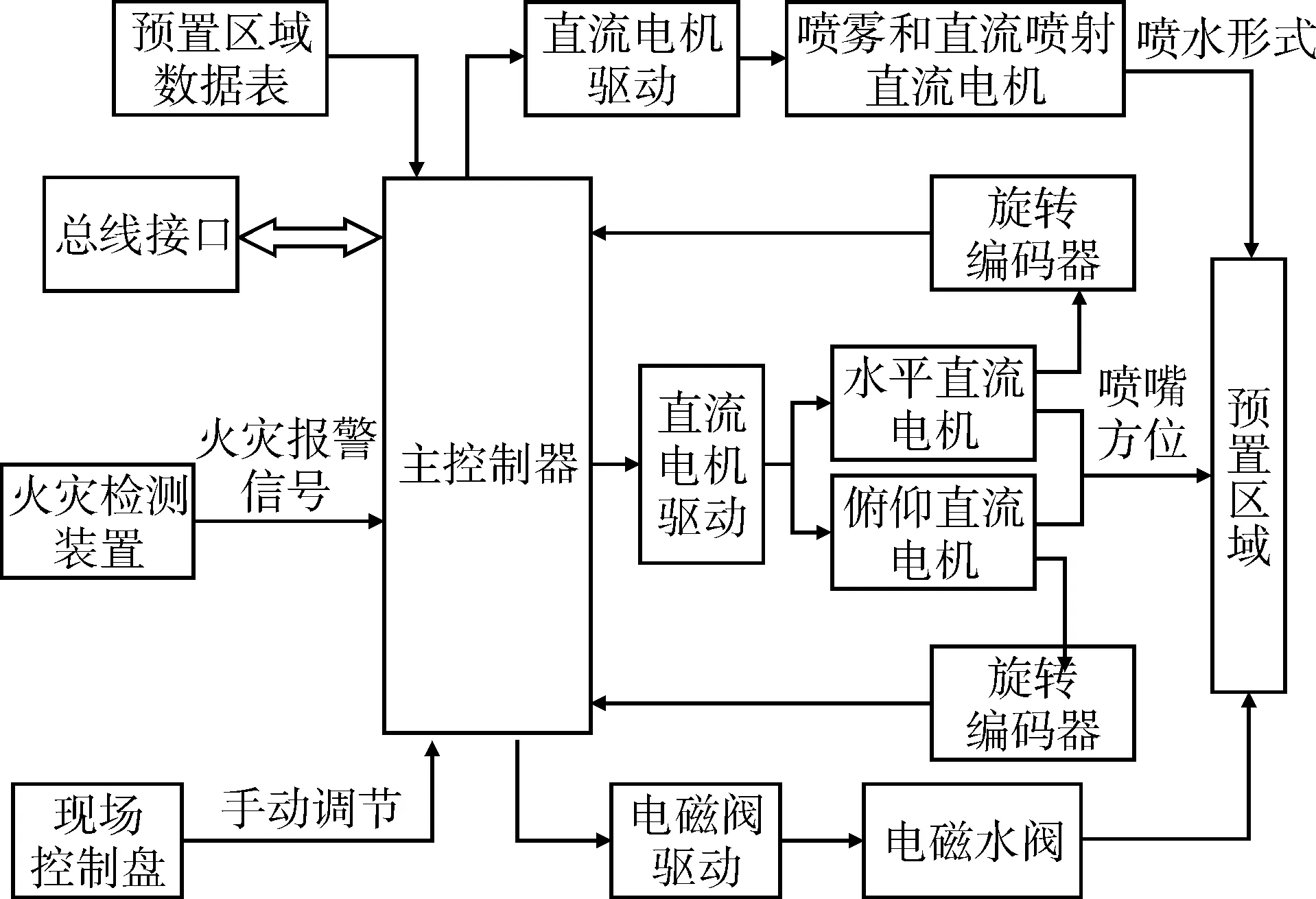
图1 系统总体框图
自摆式大流量消防炮控制系统主要由消防炮机械结构、水平和俯仰电机、电动水阀、预置区域数据表以及主控制器等组成。根据预置区域的范围,如面积、高度等,结合消防炮喷嘴水柱的扫射范围等信息,编写预置区域数据表并将其写入到存储器中。当预置区域出现火灾时,控制系统接收到来自外部输入的火灾报警信号,在其触发下,主控制器控制电动阀驱动,打开电动水阀,同时调用存储器中的预置区域数据表。主控制器根据预置的自摆式流程来控制水平、俯仰直流电机的动作,两者相互结合共同来完成消防炮的自摆式运动,同时喷嘴喷出的水柱按照预置灭火轨迹进行喷水,直至整个预置区域的灭火结束。此外,相关人员可通过现场控制盘设置消防炮喷水水柱形式,控制消防炮的某一或多个动作,调整预置参数等,也可利用RS485等总线方式实现远距离控制。
图1中的预置区域数据表里面装载了消防炮自摆式运动的信息,包括水平旋转机构的转动角度、速度范围参数,俯仰机构的俯仰角度、速度范围参数,需要何时进行喷雾(水花雾状)和直流喷射水柱形式切换的状态位标识,以及对保护区域中不需要进行消防喷水的区域等。在实际应用中,保护区域里有提供人员行走的楼梯(由耐火刚性材料制成),在对保护区域进行定期消防维护时,消防炮喷射的水柱在即将到达楼梯时,会进行运动方向的变化,使喷水轨迹绕过楼梯,继续整个保护区域的消防维护工作流程。这些运动参数设置等会提前写入数据表中,即预置数据表,在编写的控制器编译器里表现为一个库文件或者头文件形式。
1.2 系统运动形式分析
基于预置区域数据表的自摆式大流量消防炮控制系统的喷嘴运动空间如图2所示。图中的保护区域即为系统所工作的预置区域,将大流量消防炮安装在预置区域合适的位置,使大流量消防炮喷射的水柱扫描灭火范围并能够全面覆盖受保护区域。图中的自摆式消防炮利用俯仰电机完成炮口及其连接杆的垂直于地面的上下步进运动,利用水平电机完成除底座外的整个消防炮水平摆动运动,2台电机按照预置的水平摆动角度和俯仰步进角度相互配合、交替工作完成消防炮的自摆式运动,也就形成了消防炮喷嘴喷出的如图2所示的箭头所指向的“弓”字形的水柱灭火轨迹。喷嘴喷出的水柱因受到重力、风力等外界环境的影响,呈抛物线。
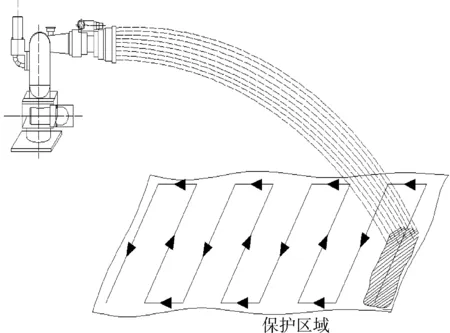
图2 自摆式大流量消防炮喷嘴空间运动示意图
2 系统硬件设计
2.1 主要元器件选择
2.1.1 电机选择
直流有刷电机作为执行元件,调速性能好、低速转矩性能优异,主要用于驱动大流量、大转矩的装置,一般启动以后工作转速恒定,且易于控制,因此被选为自摆式大流量消防炮的水平、俯仰电机。
自摆式大流量消防炮的喷嘴流量大约为70~100 L/s,最大的射程约为100 m,工作压力p≤0.8 MPa。其驱动力矩需8 Nm,因此要求直流电机的保持转矩至少大于8 Nm。结合以上因素,选用型号为130SYXB01的直流电机作为执行元件,其成本低、结构简单、低速运行性能稳定、输出转矩高。该直流电机的性能指标如表1所示。
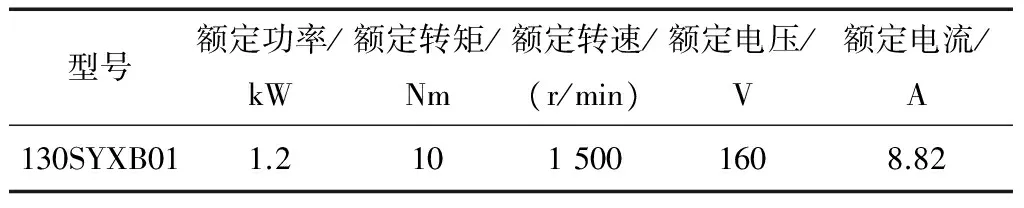
表1 直流电机的性能指标
2.1.2 编码器的选择
消防炮的水平机构旋转范围为0°~360°,俯仰机构的旋转范围为0°~180°。根据消防炮的安装环境,需要的水平、俯仰机构角位移的检测装置能够工作稳定、可靠输出且输出信号便于微控制器处理,因此选用防水型增量式编码器E6A2-CWZ3C。编码器需要与耦合器结合起来,其在消防炮内部的安装如图3所示。
该编码器的分辨率为200,增强耐轴负载性能,直流5 V电源输入,依据RS422-A规格的高速、长距离的数据传送方式的线路驱动器输出,其输出波形如图4所示。
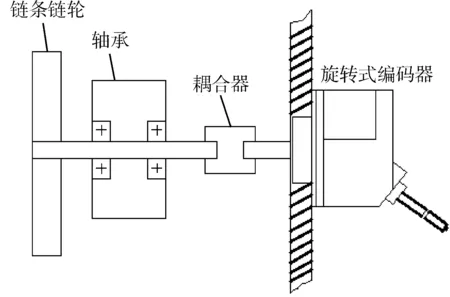
图3 编码器安装示意图
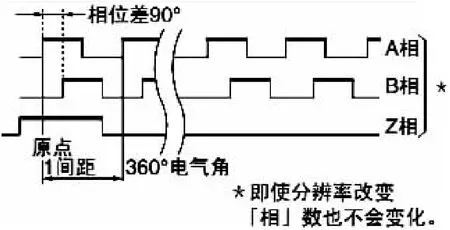
图4 编码器脉冲输出波形
2.2 直流电机驱动电路设计
根据所选用的直流电机型号,若采用直接单独选取直流电机驱动芯片的方式完成电机的驱动,其提供的驱动电流较难达到电机的额定电流或超过额定电流一定的阈值,这样电机的工作效率会急剧下降甚至给电机带来一定的损害;因此,采用分立器件搭建电路[2]来完成对直流电机的驱动。设计的直流电机H桥功率驱动电路如图5所示。
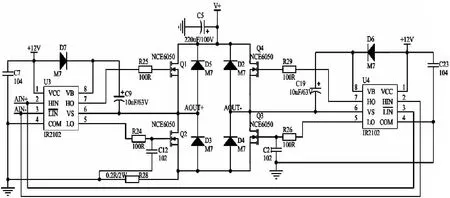
图5 H桥功率驱动电路
在图5中:IR2102芯片是一种高电压、高速度的功率MOSFET和IGBT驱动器,具有2个独立的输出通道HO和LO;C9、C19为自举电容;LIN和HIN是一对互补输入信号。假如设定电流由AOUT+流向AOUT-为正,当H桥工作在正半周时,AIN-为高电平,C9放电,相当于一个电压源,这时聚集在Q2栅极和源极的电荷在芯片内部通过R24迅速对地放电,由于死区时间影响,使Q2在Q1开通之前迅速关断,同时,对于右臂芯片的HIN为高电平,聚集在Q3栅极和源极的电荷在芯片内部通过R29迅速放电使Q1关断,AIN+为高电平时,此时Q1和Q4导通,电流由AOUT+流向AOUT-。在负半周时,当左臂HIN为高电平时,Q1关断,经过短暂的死区时间LIN为低电平,使电压12 V经过R24、Q2的栅极和源极形成回路,同时电压12 V通过二极管M7、C9、Q2形成回路,对C9进行充电,右臂与左臂工作原理相同,如此循环反复[3-5]。
2.3 无线遥控模块设计
采用无线通信模块SI4463作为无线遥控器发送端和接收端的通信模块。无线遥控模块的硬件结构框图如图6所示。
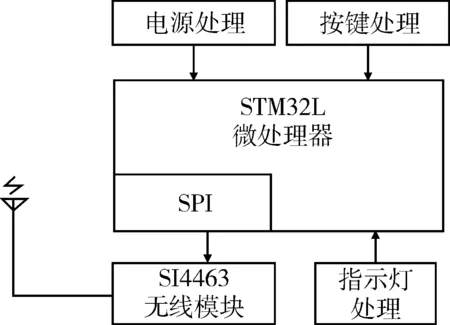
图6 无线遥控模块硬件框图
射频收发芯片SI4463的频率范围为119~1 050 MHz,接收灵敏度为-126 dBm,最大输出功率可达+20 dBm,待机模式下电流可低至50 nA。该模块的硬件接口电路如图7所示。
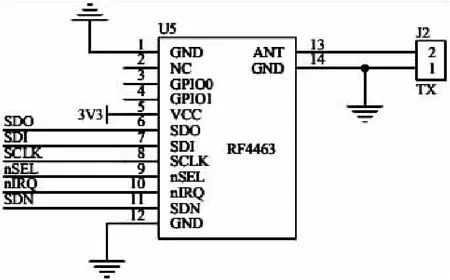
图7 SI4463模块接口电路图
在主动模式且功率为10 dBm的条件下,SI4463模块的发送电流消耗约为18 mA,接收电流消耗约为10 mA。SI4432模块的发射电流为25.0 mA,接收电流为18.5 mA。极低的待机电流和快速唤醒可确保在最苛刻的应用中延长电池寿命。此外,在保证低功耗的同时,它的电路设计简单且成本低[6-10]。
2.4 消防炮主控制器设计
采用超低功耗的高级ARM的32位MCU-STM32L053C8T6作为消防炮主控制器,其工作频率为32 kHz~32 MHz,集成了存储器保护单元、高速嵌入存储器(64 kB闪存,2 kB数据EPROM和8 kB的RAM),以及各种增强I/O和外设,工作电压为1.65~3.6 V,待机模式下的电流低至0.27 μA,唤醒时间能够快至3.5 μs,且定时分辨率高,中断响应速度快,指令执行时间短。自摆式大流量消防炮的主控制硬件电路框图如图8所示。
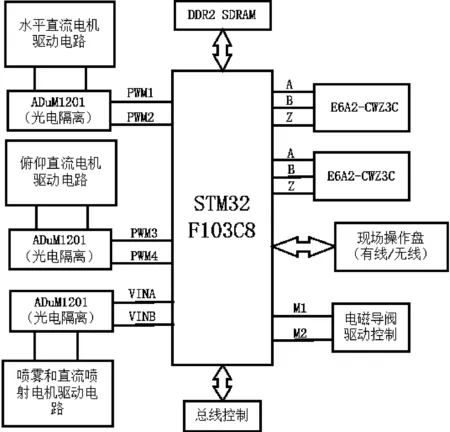
图8 主控制器硬件电路框图
在图8中:采用双极性脉宽调制(PWM)控制模式控制电机驱动电路;主回路与控制回路之间的电气隔离采用光电隔离电路来实现;水平、俯仰直流电机的驱动电路相同;为避免H桥上下桥臂出现直通现象,通过软件方法(即当电机进入正反转换向时,插入一段延时程序)来实现死区时间;利用通用定时器的计数功能来完成对A、B两计数相输出脉冲个数的计数,判断A、B两相的信号序列相位差来确定直流电机正反转,同时根据Z相计圈来确定直流电机的旋转角度;旋转编码器将电机的旋转角度实时反馈给控制器,控制器将接收到的数据与预置数据表里的数据进行对比,直到达到预置数据表的电机旋转角度,再进行下一个电机旋转工作流程。
3 系统软件设计
对整个消防炮的控制主要分为按照预置区域数据表消防炮自身做自摆式运动和操作人员使用有线操作盘或者无线遥控器对消防炮进行操作两部分。有线操作盘主要通过RS485总线的方式来实现通信进而控制消防炮。
3.1 无线遥控方式程序
无线遥控器中的按键处理采用类似ARQ重传机制来确保按键之间的数据可靠传输。遥控器通过按键在数据包发送完成后,等待消防炮接收点发来的ACK包来确认本次传输数据包成功。考虑时间的开销,可以至多连续3次的指令重传来实现准确及时的传输无线数据。无线遥控器的控制程序流程图如图9所示。
STM32L053和SI4463之间的通信采用4线制SPI配置寄存器的方式来设置数据包的结构、前导码长度以及同步字内容等,最后通过读写寄存器从FIFO中发送或者读取数据包。
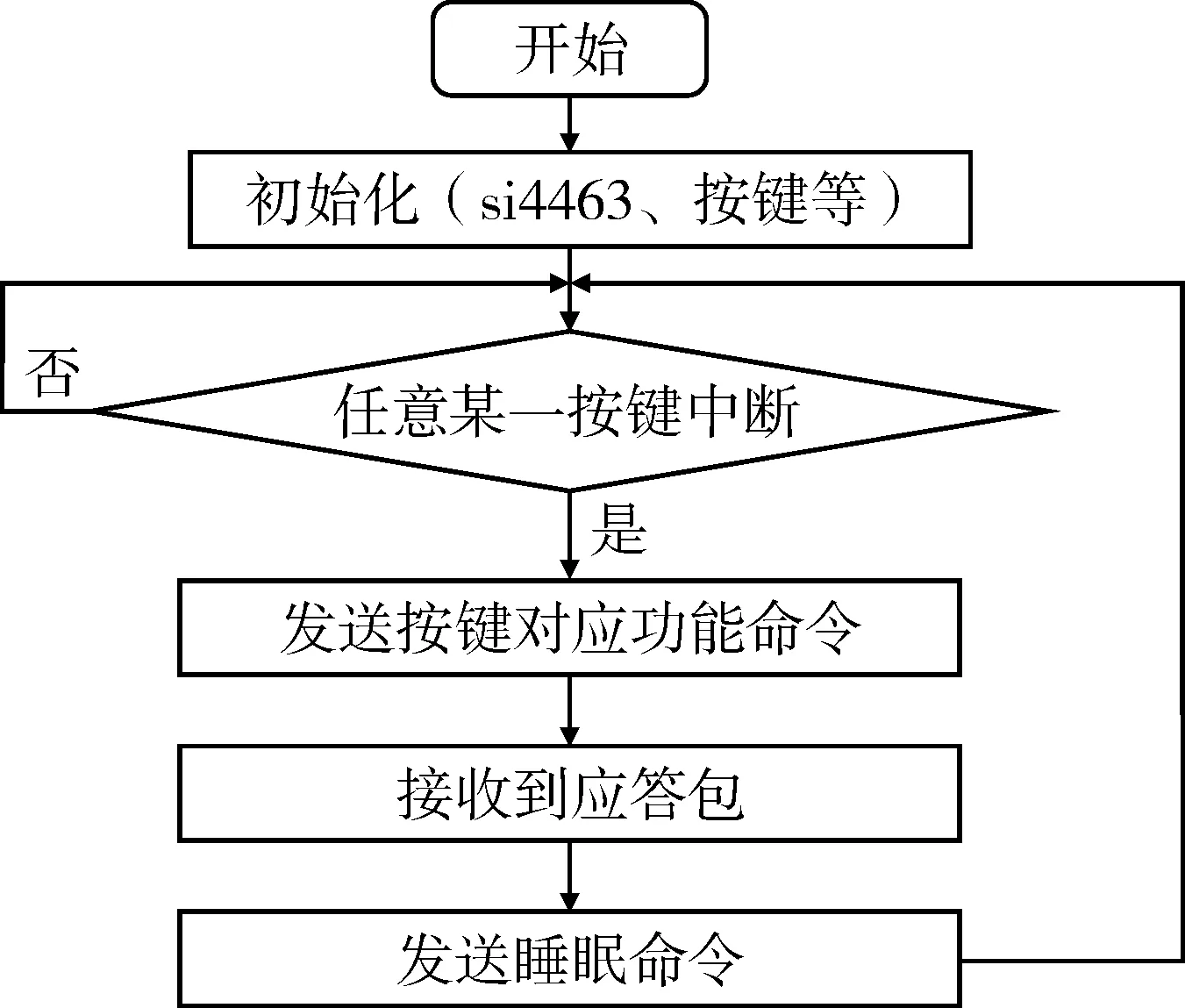
图9 无线遥控器的控制程序流程图
3.2 基于预置区域数据表方式的控制程序
基于预置区域数据表的自摆式大流量消防炮控制系统上电后,主控制器首先将预置区域的数据表编入程序中,且植入到存储器中,接着初始化各项设置(包括对SI4463、串口等初始化)。若未有报警信号输入时,消防炮进入复位状态,即消防炮的初始状态;若检测到火灾报警信号的输入,主控制器立即调用预置的数据表,然后向直流电机的驱动发出控制信号,使水平、俯仰机构进入自摆式的预置工作流程,同时也向电动阀、喷雾和直流喷射电机发送控制信号。主控制器实时获取编码器所反馈的角度信息,调用预置数据表中相应的模块,发送下一个电机控制信号。当检测到水平、俯仰机构运动到水平、俯仰旋转的设定阀值时,则进入水平、俯仰机构回转状态,直到进入下一个初始状态,程序也相应开始循环执行,直到报警信号的解除,系统再次进入等待报警信号状态。该系统的控制流程如图10所示。
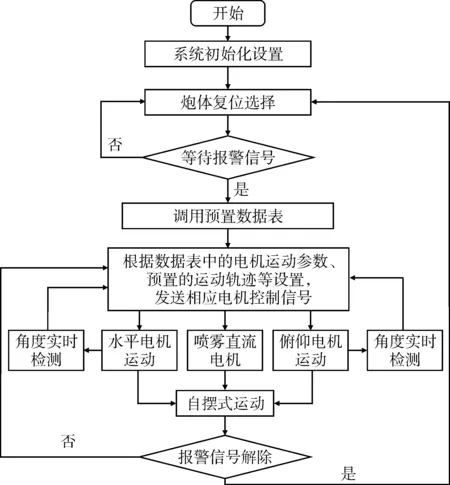
图10 系统控制程序流程图
4 结束语
本文设计的基于预置区域自摆式大流量消防炮在实际的使用中性能稳定、可靠,具有良好的使用效果,可有效解决大空间保护区域出现火灾时不能快速、有效的灭火问题。此外,根据该消防炮预置、自摆式、大流量等特点,应用到温度不宜过高的大空间的半露天、全封闭等场所,可起到区域降温的作用,定期防护,可大大减小火灾的发生率。本文所阐述的基于预置区域数据表的自摆式大流量消防炮已成功地应用到广东某电厂的消防工程上。现场应用如图11所示。该系统是对大空间型消防设备的有效开发,具有广阔的市场应用前景。

图11 现场应用图
[1]周勇,邓成中.自动消防炮定位显示控制系统[J].西华大学学报(自然科学版),2017,36(3):69.
[2]于春香.H桥直流电机驱动控制电路设计[J].集成电路通讯,2012,30(3):22.
[3]赵振虎.基于PWM技术的直流电机控制系统[J].变频技术应用,2012,7(3):55.
[4]刘媛媛,冯宏伟.基于P87LPC768的大功率直流电机驱动控制电路[J].机械工程与自动化,2014(3):158.
[5]胡发焕,杨杰,邱小童. 大功率直流电机驱动电路的设计[J]. 机械与电子,2009(10):77.
[6]杨勇,邓成中.消防车用消防炮控制系统设计[J].消防科学与技术,2012,31(9):974.
[7]喻兴隆,邓成中.自动消防炮驱动系统的设计[J].消防科学与技术,2010,29(6):510.
[8]王志勇,孙顺远,徐保国.基于SI4463的低功耗无线窖池测温系统的设计与应用[J].计算机测量与控制,2014,22(2):519.
[9]吴昊.基于总线网络的大流量消防炮控制系统设计[D].成都:西华大学,2013.
[10]喻兴隆.智能消防炮控制系统设计[D].成都:西华大学,2011.
