基于数字图像的混凝土道路裂缝检测方法综述
2018-02-02蒋文波罗秋容张晓华
蒋文波,罗秋容,张晓华
(1.西华大学电气与电子信息学院,四川 成都 610039;2.广岛工业大学,日本 广岛 731-5193)
公路、隧道和桥梁作为重要的道路交通基础设施,关系到国民生产的各行业及人们的日常生活。快速发展的道路交通基础设施为人们的日常生活提供便利,同时也给设施的监管和养护带来了新的挑战。在公路、桥梁及隧道等交通基础设施的建设中,混凝土发挥着重要作用,同时在混凝土结构表面的维护中,裂缝是最常见病害之一;因此,加强混凝土结构裂缝的检查和养护工作尤为重要。
早期的检查和养护主要依靠人工方式,这种方式不仅费时、费力,结果也不够严谨和精确,而且对于隧道和跨山、河而建的桥梁,其危险度高。为满足经济社会建设的需要,急需开发更高效、更稳定、更智能的混凝土裂缝检测新技术和新方法。
目前,基于数字图像的裂缝检测系统是较为主流的检测方法,现已用于公路、隧道和桥梁等混凝土结构裂缝检测中。系统一般由图像采集硬件系统和图像处理软件系统2部分组成。图像采集常采用多功能道路检测车,图像处理常采用图像预处理算法、基于阈值分割和边缘分割的裂缝检测算法和基于数学形态学的裂缝检测算法等。通常,检测步骤一般分为3步,首先通过车载摄像头采集裂缝图像,然后通过检测算法对采集到的图像进行处理,最后得到裂缝类型、裂缝位置和病害严重程度等信息。
本文从图像采集硬件系统和图像处理软件系统2方面分别对公路、隧道和桥梁3种混凝土裂缝检测方法的研究现状进行全面分析与总结,重点分析目前存在的问题,并对接下来的研究方向提出建议。
1 公路裂缝检测
1.1 硬件系统研究现状
裂缝检测的第一步是混凝土表面图像采集,主要依靠硬件系统来实现,如多功能检测车等。
多功能检测车的研究始于20世纪60年代末,国外已开发了一系列的车载裂缝检测系统,比较典型的有法国的GERPHO系统[1]、日本的Komatsu系统[2]、加拿大的ARAN(Automatic Road Analyzer)系统[3]和澳大利亚的Hawkeye系统[4]等。具体检测技术及优缺点如表1所示。
表1 国外车载裂缝检测系统发展分析
参照国外多功能道路检测车的研究,国内也研发了相应的车载裂缝检测系统,如南京理工大学研发的N-1系统和JG-1系统[5]、武汉大学研发的ZOYON-RTM系统[6-7]、北京公路科学研究院开发的CiCS(cracking image collection system)系统[6-7]等。具体检测系统及优缺点如表2所示。
表2 国内车载裂缝检测系统发展分析
目前,国内外许多公司和学者仍致力于研究新的车载裂缝检测系统。利用智能检测车进行裂缝检测具有广阔的发展前景和巨大的经济价值,必将成为未来交通设施维护的主要发展方向。
1.2 软件系统研究现状
上述采集到的公路裂缝图像含有大量噪声,须进行图像预处理和图像分割等操作;因此,软件系统对于裂缝检测同样重要。软件系统的核心是检测算法,图像预处理包括增强算法和去噪算法,图像分割包括基于阈值和基于边缘检测等分割算法。
下面分别对裂缝预处理算法和裂缝分割算法的研究进展进行分析。
1.2.1 裂缝预处理算法
通常情况下,公路裂缝图像受杂物、油污、阴影和光斑等影响,质量低,识别难度大,因此,须对图像进行增强和去噪等操作,以削弱或消除这些干扰。其中:前者主要是通过消除背景不均匀及阴影的影响来突出识别目标,增强图像识别的能力;后者主要是去除图像中的噪声点,同时最大程度地保留图像的细节信息。
常见的图像增强和去噪方法有传统图像增强法[8-10]、数学形态学法[11-12]、模糊理论法[13-14]、小波变换法[15-16],以及最新的方法,如多级去噪模型法[17]、多特征融合法[18]等方法。
1)传统图像增强法主要是对灰度图像的处理,有直方图均衡化法、维纳滤波法、差影法等。这些方法降低了光照不均匀的干扰,但增强效果不显著。
2)数学形态学法利用形态学中4个基本算子的不同组合对裂缝目标进行处理。形态学滤波作为一种降噪算法,常与图像分割算法组合起来使用,但该方法结构元素相对不容易确定,且去噪速度慢。
3)模糊理论法利用公路图像本身的模糊性,将公路裂缝图像从频域转到模糊域进行图像增强研究。该方法对于消除因光照不均匀引起的公路噪声有很好的效果。
4)小波变换法是对公路图像进行分解变换,对不同分解尺度上的小波系数进行处理,从而消除公路裂缝图像中的噪声。这种方法可以根据裂缝图像的特点选择不同的小波,以达到不同的去噪要求,但是在一定程度上会造成重构图像失真,影响去噪效果。
5)最新的方法。公路图像中常存在各种叠加的复杂噪声,若单一采用上述预处理方法都不能有效去除叠加的多种噪声;因此,出现结合多种去噪算法的新方法。文献[17]提出了适用于公路裂缝检测的多级去噪模型,该模型结合灰度去噪、空间滤波和形态学滤波等方法,可同时去除不同类型的噪声。文献[18]提出了基于多特征融合的裂缝提取算法,该方法能解决复杂背景下的噪声去除问题,算法提取结果如图1所示:裂缝虽有部分断裂,但背景噪声滤除良好,能满足实际检测需要。
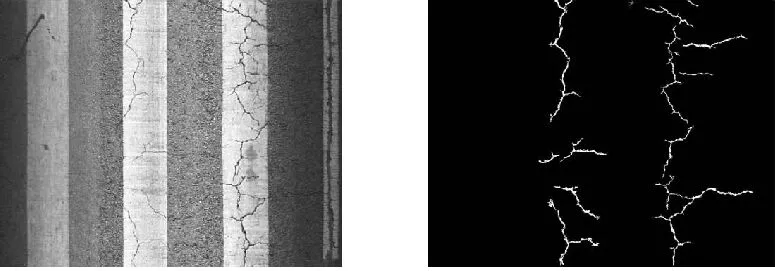
(a)公路有斑马线干扰的裂缝信息提取结果
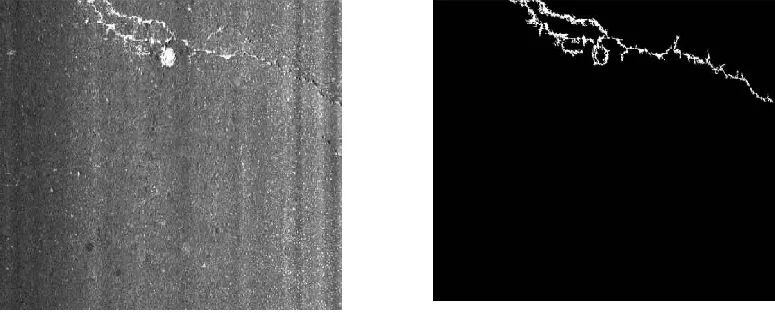
(b)公路有粉尘遮挡物的裂缝信息提取结果
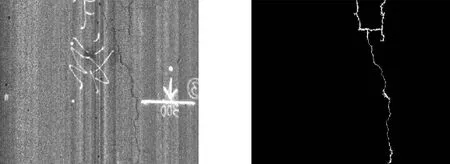
(c)公路有不规则路标及油污的裂缝信息提取结果
1.2.2 裂缝分割算法
图像分割是将图像划分为不同的区域,把目标区域从背景中分离出来,分割好坏直接影响裂缝的分类和评价。常见分割算法有基于阈值和基于边缘检测的分割算法。近几年陆续出现新的分割算法。
1)基于阈值的分割算法。
基于阈值的图像分割方法起源较早,运用范围十分广泛。1992年,Kirschke等[19]提出了基于直方图的公路破损图像阈值分割方法,这种方法只能用于较明显的裂缝识别。1997年,Siriphan[20]对比了Otsu阈值法、回归法、松弛因子法、Kittler阈值法等4种公路破损图像阈值分割方法,认为回归法效果最好,但不具备通用性。2003年,Cheng等[21]提出了一种减少样本空间和插值的实时阈值分割算法,该方法提高了样本的实时性,但未考虑裂缝的空间分布特征,误检率和漏检率都较高。2009年,Katakam[22]采用对公路图像分块后,再分别对各子块阈值分割的方法,得到裂缝目标,极大提高了裂缝的识别率。2016年,姜吉荣[23]提出结合Otsu、多特征和形态学的公路裂缝目标提取方法,该方法综合考虑了较多裂缝特征,具有较好的稳定性和实用性,并与传统分割算法提取效果进行了对比,其结果如图2所示。
总体而言,阈值分割算法一般适用于背景灰度一致、光照均匀和对比度较高的图像处理。当考虑较多裂缝特征时,裂缝识别率更高。
2)基于边缘检测的分割算法。
裂缝边缘的灰度具有明显的阶跃现象,且背景灰度变化缓慢;因此可以通过检测裂缝边缘来分割出裂缝目标。
学者们对边缘检测算法展开了研究,提出了许多边缘检测算子。常用的边缘检测算子有Robert算子、Sobel算子、Canny算子、Prewiit算子和LOG算子等。2007年,Shah[24]和Wang等[25]对基于边缘检测的裂缝分割进行了研究,但没有考虑公路病害的自然属性,算法的适用范围不太理想。2008年,张娟等[26]提出采用相位编组法进行裂缝提取,该方法有利于检测出有强弱对比度的裂缝及细小裂缝,但算法产生的伪裂缝较多。2014年,瞿中等[27]、Oliveira等[28]采用基于形态学的裂缝检测算法,利用数学形态学4个基本操作算子来完成线状裂缝目标的检测、连接等处理,但该类方法需要裂缝有较强的边缘性,并且过多的阈值设定降低了此类方法的可用性和检测效果。
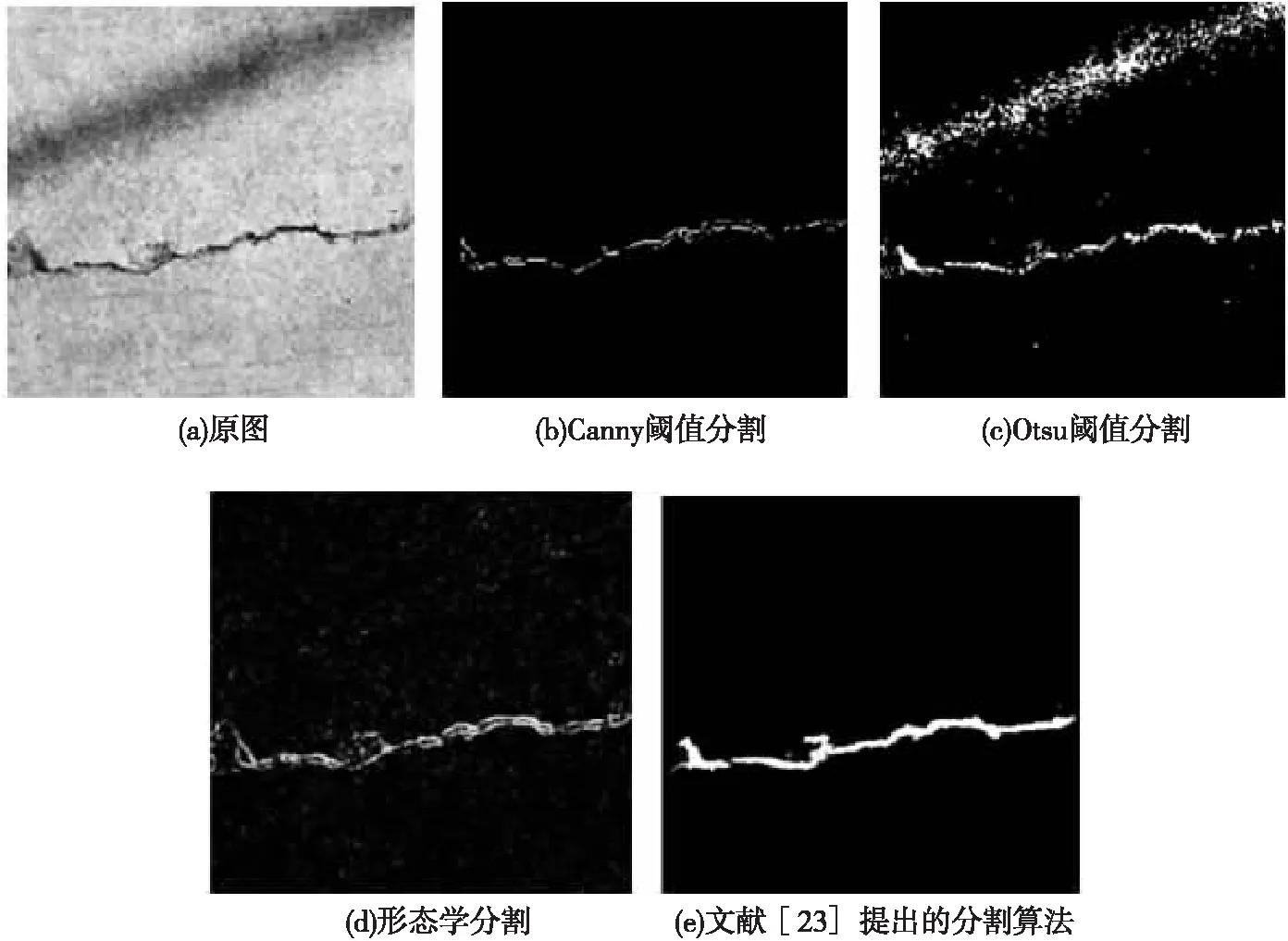
图2 不同分割算法提取结果[23]
总之,边缘检测的分割算法大都是基于局部灰度和梯度信息识别裂缝边缘,仅适用于具有较强边缘信息的裂缝图,且易将边缘信息强的背景判断为裂缝信息点。当噪声较多时,边缘检测的效果较差。
3)其他方法。
近年来,也出现了一些高效、准确的裂缝分割算法,例如基于种子生长的图像识别算法[29-30]、基于渗流模型的裂缝检测算法[31]、基于有监督学习的裂缝识别算法[32]和基于公路裂缝的三维检测算法[33]等。
基于种子生长的图像识别算法具有高效、准确和易自动实时处理等优点,受到了许多先进检测系统的青睐。基于渗流模型的裂缝检测算法精确率高,但算法耗时长。文献[31]对基于渗流模型的传统检测算法进行了改进,对比了传统渗流算法与改进渗流算法的裂缝提取效果,其结果表明改进渗流算法不仅继承了原算法精确率高的优点,还降低了图像的噪声率,如图3所示。基于有监督学习的裂缝识别算法在准确率方面有所改善,但需要监督学习、计算成本高,不利于海量公路图像的自动实时处理。基于公路裂缝的三维检测算法可以很好识别出裂缝并且完成裂缝特征数据的提取,性能稳定且准确率高, 对公路养护管理决策的制定和路表三维形态重构起到了重要的指导作用,发展前景较好。
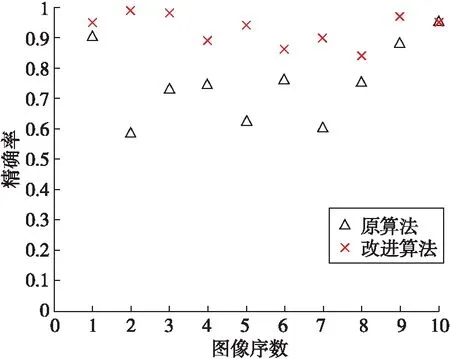
(a)精确率
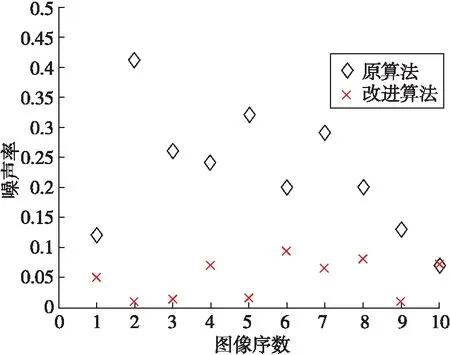
(b)噪声率
1.2.3 存在的主要问题
综合分析国内外基于数字图像的公路裂缝检测方法,对目前公路裂缝检测硬件、软件系统存在的问题总结如下:
1)数据采集率和准确性不够高,裂缝信息采集及识别还未完全实现智能化和实时化;
2)破损分类和评价系统的建立还不够完善;
3)现存的去噪算法和分割算法都具有一定针对性,不具有通用性;
4)裂缝分割时考虑的特征较少,易导致误检和漏检;
5)在提取裂缝时,部分去噪算法和分割算法会造成裂缝的断裂,这将影响到后期参数的精确计算。
2 隧道裂缝检测
隧道裂缝与公路裂缝在外部环境与图像特征上存在着区别,因此,其图像采集与识别方法相对于公路裂缝有所不同。
当前国内外隧道裂缝自动检测技术可以归纳为2大类:第1类是基于形变数据的固定式检测方法;第2类是基于光学成像和图像处理技术的移动式检测方法。其中:前者检测成本高、操作复杂,不能作为一种普适的检测方法;后者采用安装相机的检测车采集隧道图像数据,利用图像处理技术对图像中的裂缝进行分析识别。
随着图像釆集设备和图像处理技术的不断发展,基于数字图像的裂缝检测系统的检测效率和准确率都飞速提高,因此,它成为隧道裂缝自动检测的主要发展方向。
2.1 硬件系统研究现状
从外部环境上来说,隧道裂缝硬件采集系统存在以下难点:隧道内光线不足,采集的裂缝图像质量不高;隧道内检测时间有限,检测存在较大的安全隐患;对于处于超长隧道的裂缝,所采集的图像数据量大。针对隧道所处环境特点,相比于公路裂缝,隧道裂缝硬件采集系统须能解决上述问题。
最初,隧道裂缝图像采集主要是依靠人工拍摄,这种采集方式需要通过肉眼初步判断后进行采集,工作量大、危险系数高且易漏检。随着科技的发展,隧道检测车运应而生,它解决了隧道裂缝检测速度和安全的问题。
韩国、德国和日本在隧道裂缝检测车领域处于领先地位,已研发出一系列基于隧道检测车的裂缝检测系统[34-36],其核心技术和优缺点如表3所示。
表3 国外隧道裂缝检测系统技术及优缺点分析

年份国家核心技术优缺点2003韩国[34] 收敛传感器、局部控制单元 优点:能检测隧道形变、裂缝等病害 缺点:成本高,操作复杂2006德国[35] 隧道激光扫描技术 优点:功能全面,提高了采集图像质量 缺点:不能对裂缝进行分类2012日本[36] 光学检测系统 优点:检测精度达0.2mm,检测成本低 缺点:检测不够快速准确
在我国,隧道裂缝检测车最初是以国外进口为主,但2015年武汉卓越科技有限公司的“隧道医生”检测车的下线,打破了国外隧道检测技术在我国的垄断。2017年,武汉长盛公司发布了JL-PTCDS(A)隧道裂缝全景快速检测系统,该系统的问世,成功解决了目前隧道检测的速度、精度和安全问题,填补了国内市场空白,标志着我国成功攻克隧道快速检测的世界性难题。
近几年,针对隧道裂缝特点,国内学者设计了一系列检测系统[37-39],其核心技术和优缺点如表4所示。文献[37]所述系统,使隧道裂缝检测不仅仅限于病害检测,同时能实现病害变化趋势预测。文献[38]所述系统的框图如图4所示,其独特的相机分布与LED光源分布,解决了隧道内部光线不足的问题。文献[39]建立了分布式集群,能实现隧道裂缝图像分布式存储与分布式处理,解决了海量隧道裂缝图像存储与处理的问题。
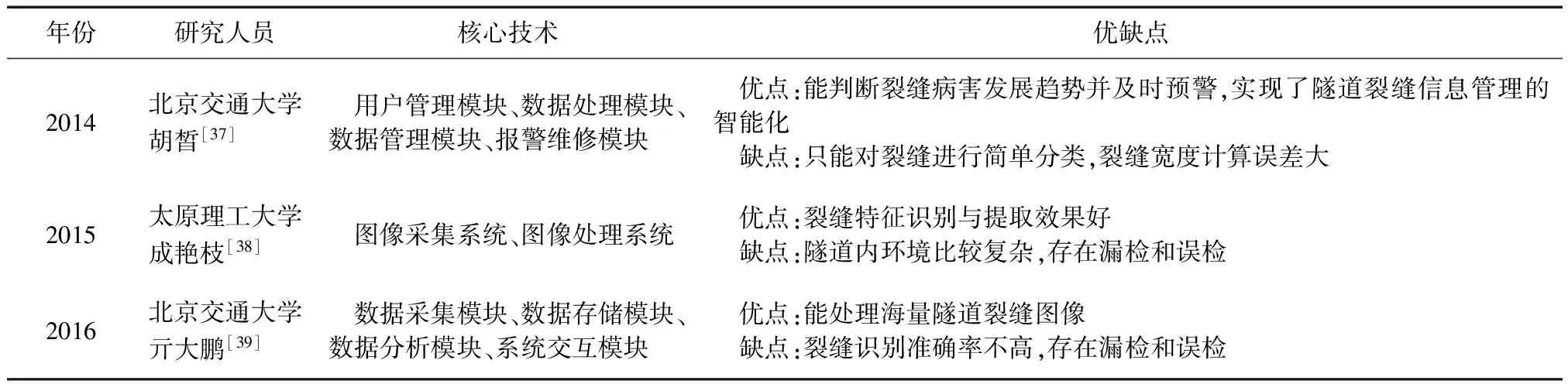
表4 国内隧道裂缝检测系统技术及优缺点分析
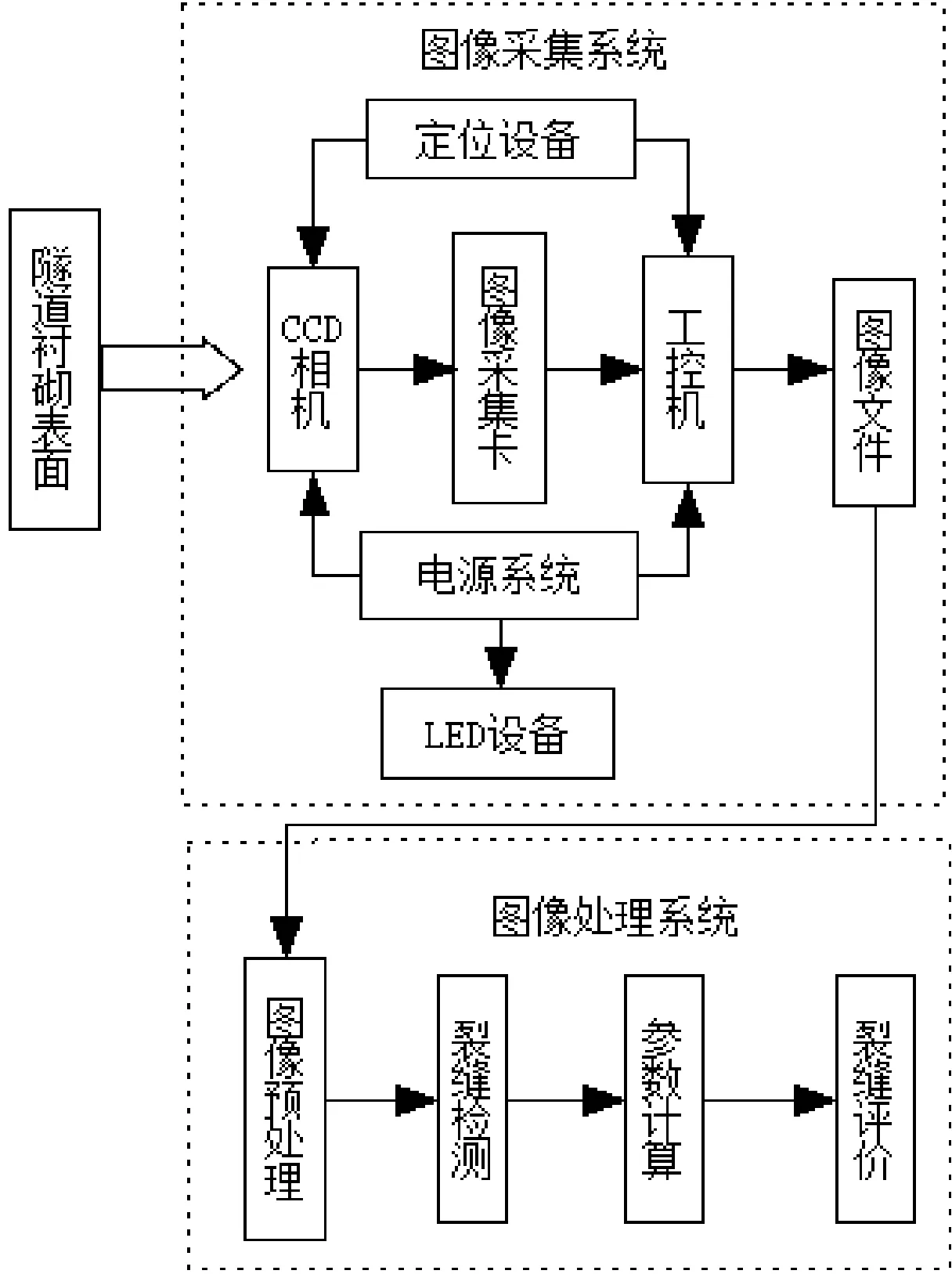
图4 隧道裂缝检测系统框图[38]
2.2 软件系统研究现状
从图像特征上说,隧道裂缝图像存在表面纹理复杂、噪声污染严重、渗水严重、裂缝与背景对比度低等问题。相比于公路裂缝检测算法,其软件系统的检测算法应着重解决以上问题。
2.2.1 预处理算法
相对于公路裂缝,隧道裂缝噪声没有叠加的复杂噪声,因此预处理应致力于去除复杂纹理背景、保护裂缝边缘信息、提高裂缝图像信噪比等方面。
在传统的图像去噪方法中,维纳滤波[40]能较好地保存裂缝的边缘信息,但噪声滤除效果不好,对后续的裂缝提取不利;中值滤波[41]、均值滤波[42]对噪声的滤除效果好,但不能较好地保存裂缝的细节信息,且对边缘有一定程度的模糊。
学者们不断对滤波算法进行改进,提出了基于结构元素的中值滤波[43]、加权邻域滤波[44]、自适应中值滤波[45]等方法,但是这些方法仍然无法消除隧道中复杂裂纹背景的影响。文献[46]在参考上述方法的基础上,提出一种融合多种处理技术的SFC结合法,该方法不但可以有效去除噪声、消除复杂裂纹背景的影响,还能锐化裂缝边缘,解决隧道渗水所导致边缘模糊的问题。为解决裂缝与背景对比度低的问题, 文献[47]提出了一种基于图像融合的新方法,首先采用改进Canny算子对裂缝图像进行边缘检测,接着将小波分解后的两层图像融合,最终通过小波反变换得到裂缝图像。该方法提高了图像的峰值信噪比和裂缝检测精度,图像增强效果良好。文献[48]提出的全局与局部相结合的预处理算法和基于连通区域的多级滤波算法,在提升裂缝与背景对比度的基础上,更能滤去隧道图像大量不规则噪声和解决图像光照不均匀问题,裂缝识别率较高,具体裂缝提取流程如图5所示。
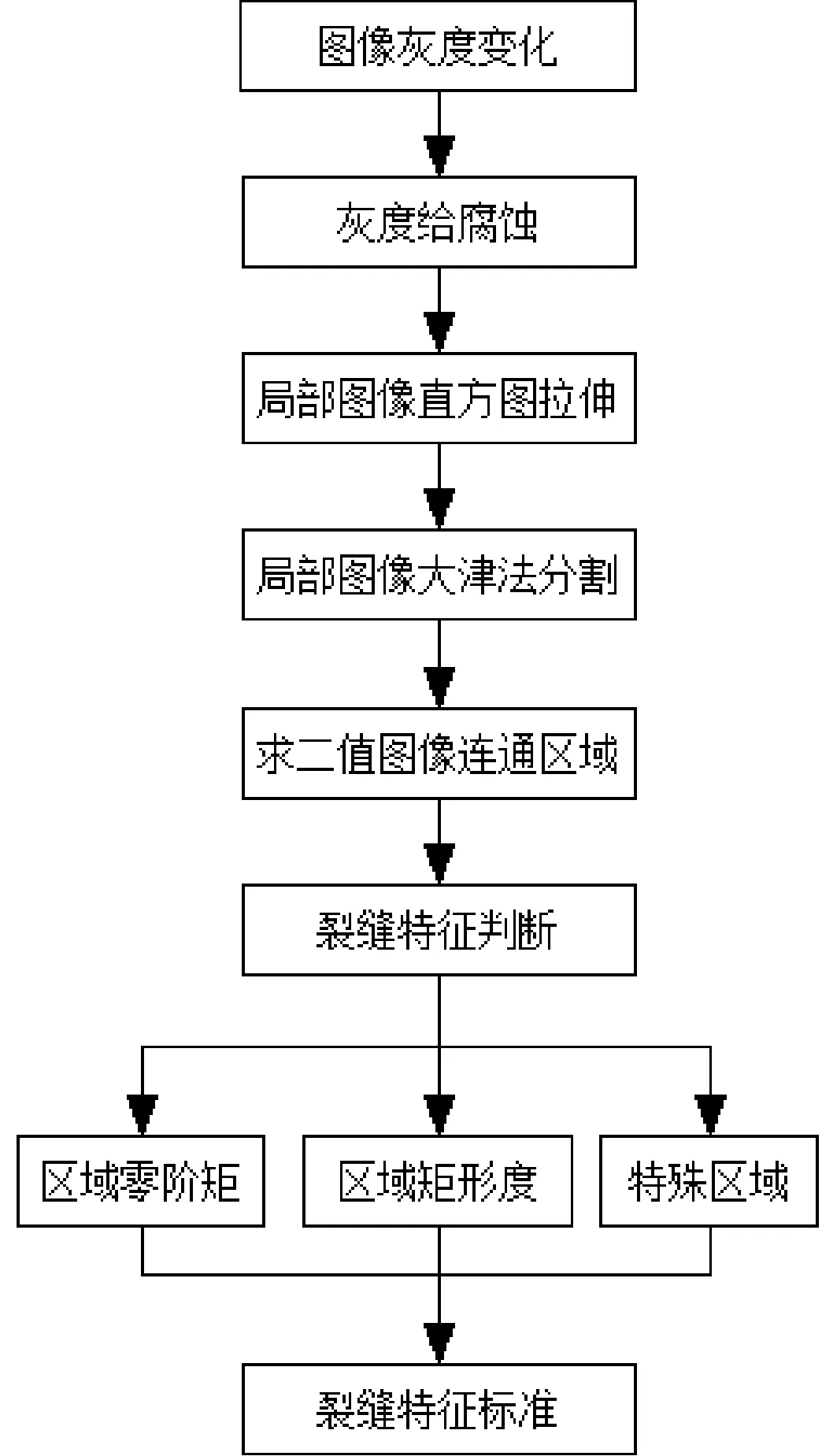
图5 裂缝提取流程图[48]
2.2.2 分割算法
图像分割算法主要有边缘检测法、阈值分割法和基于区域生长的分割方法。
如公路裂缝分割算法所述,阈值分割算法一般适用于背景灰度一致、光照均匀和对比度较高的图像处理,而隧道裂缝与背景灰度值相近,直接使用阈值分割法将导致裂缝目标信息淹没在大量的噪声中,很难将目标区域与背景区域分开。边缘检测的分割算法仅适用于具有较强边缘信息的裂缝图,当噪声较多时,边缘检测的效果较差。单纯的阈值分割算法和边缘检测分割算法都不适用于隧道裂缝的分割提取。
文献[49]在考虑隧道裂缝图像特点的基础上,提出基于边缘信息的改进Otsu分割方法。该方法首先采用八方向的Sobel算子对图像进行边缘检测,然后通过特定点计算分割的最佳阈值,最后利用Otsu方法进行图像分割。该分割方法能很好地将隧道裂缝从背景中分离出来。
阈值、边缘分割方法对隧道裂缝图像分割都有一定的缺陷。为更好地将裂缝从背景中分离出来,需要一种更准确和细致的划分裂缝目标的方法。文献[50]提出一种基于最小路径的裂缝识别算法,该算法以裂缝点作为起始点,按最小路径的原则向周围生长,能快速准确提取出连续的裂缝,但起始点需要手动选取。
为更快速、有效地检测出隧道裂缝图像,文献[51]研究了衬砌裂缝远距离图像测量技术,将采集到的裂缝图像结合试验拟合标定曲线,对图像进行裂缝区域提取、形态学处理等操作,为裂缝检测提出了新思路。
隧道裂缝的检测不仅要致力于裂缝病害的检测,还应致力于病害趋势的分析。文献[52]对隧道裂缝图像智能匹配与变化趋势检测算法进行研究,通过设定宽度变化阈值,对隧道裂缝趋势进行监控。该算法处理传统公路裂缝图像和隧道裂缝图像的结果如表5所示。
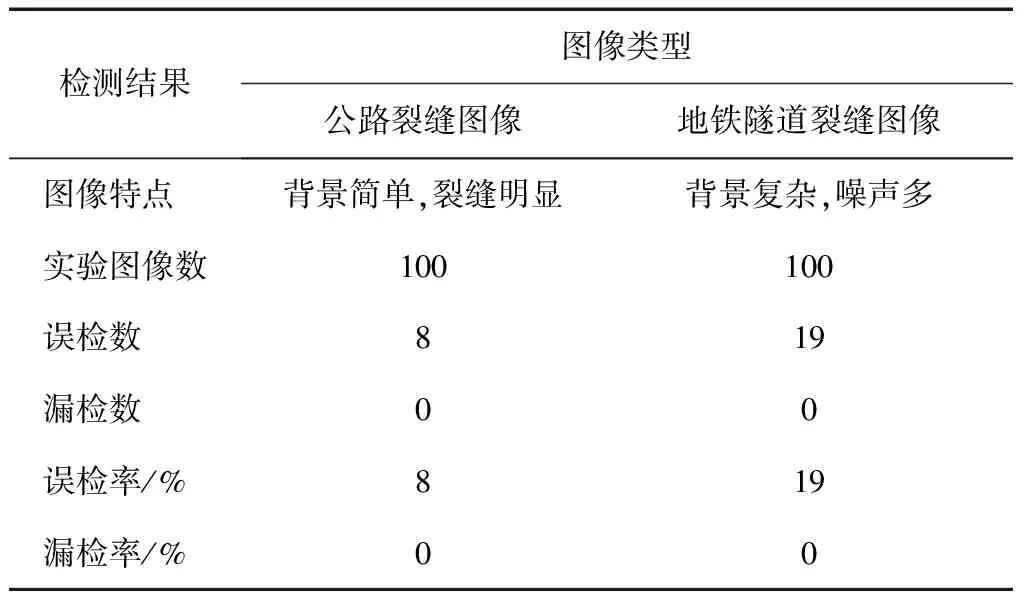
表5 公路裂缝图像和隧道裂缝图像检测结果[52]
2.3 存在的主要问题
综合对国内外基于数字图像的隧道裂缝自动检测技术分析,对目前隧道裂缝检测硬件、软件系统存在的问题总结如下:
1)我国隧道裂缝检测车主要是以国外进口为主,现有的检测设备不够成熟;
2)隧道内部环境较差、光照强度低、表面纹理复杂、噪声分布无规律,采集的图像质量不佳,而且现有算法无法同时兼顾这些问题,裂缝检测精确率有待提高;
3)针对长距离隧道和高速铁路隧道的检测,若图像采集速度过慢,无法满足检测需要,但检测车速度加快又会导致图像质量降低,不利于后期图像的处理和分析。
3 桥梁裂缝检测
桥梁裂缝在成因及形态上与公路裂缝较为接近,但桥梁所处情况相对公路更复杂(桥梁跨山、河而建,呈圆柱形),且桥梁底面存在表层脱落、水渍、划痕等缺陷;因此,可在借鉴公路裂缝检测技术的基础上,进一步研究适合于桥梁裂缝检测的方法。
最初,国内外对桥梁裂缝检测研究主要采用超声仪、传感器等物理设备进行,针对桥梁裂缝硬件检测系统的研究相对较少,利用数字图像进行裂缝自动检测起步较晚。目前,国内外许多专家都致力于将数字图像处理技术应用于桥梁裂缝的检测中,并取得相应的成果。
3.1 硬件系统研究现状
诸多桥梁都是跨山、跨河而建,裂缝检测车只适用于采集桥梁上表面的裂缝,对于桥梁侧面与下表面的裂缝,图像采集存在困难;因此,针对桥梁裂缝的各种硬件采集系统应运而生[53-55],具体系统和工作原理如表6所示。

表6 桥梁裂缝硬件采集系统
3.2 软件系统研究现状
桥梁裂缝与公路裂缝在成因及形态上较为接近,而且基于数字图像的公路裂缝检测技术较为成熟;因此,可将其用于桥梁裂缝检测。桥梁底面存在表层脱落、水渍等缺陷,因此,为提高桥梁裂缝检测精确度,须对其裂缝提取算法进一步研究。
同公路裂缝图像一样,桥梁上表面裂缝有大量污染物,在对其进行检测前需要进行去噪处理,综合公路裂缝去噪方法分析,采用多级去噪模型[17]和基于多特征融合的裂缝检测算法[18]能较好地去除复杂噪声,从而提取出桥梁裂缝。
在桥梁裂缝检测中,对于圆柱形桥梁裂缝的检测需用到基于三维扫描的裂缝检测技术。文献[56]采用三维投影技术和图像处理方法对中国台湾某圆柱形桥梁进行了现场测试,该方法不仅可以检测圆柱形裂缝,而且可识别并显示宽度达0.2像素的肉眼不可见裂缝。基于三维扫描的裂缝检测技术具有裂缝检测精确性好,定位精度高等优点[57]。
开发桥梁裂缝分析软件对裂缝高效检测尤为重要。文献[58]在分析桥梁裂缝图像特点的基础上,开发出一套适用于远距离桥梁缺陷检测的图像分析软件。该分析软件在桥梁缺陷检测方面实用性较高,但识别精度仍有待提高。文献[59]采用机器视觉技术开发了一套裂缝智能识别软件。该软件对桥底图像进行处理、识别、计算和记录裂缝的特征参数,以评估桥梁的裂缝损伤情况。
3.3 存在的主要问题
尽管关于基于数字图像的桥梁裂缝自动检测系统取得了一定成绩,但还存在很多问题。
1)桥梁所处环境复杂,基于数字图像处理的桥梁裂缝检测主要集中在公路桥梁上,对于环境复杂的桥梁并不一定适用。
2)目前研究多集中在对桥梁裂缝图像的采集,对于如何进行裂缝的参数识别,还没有足够深入的研究。
3)桥梁底面存在大量噪声,裂缝信息难以识别,目前的裂缝检测算法都存在一定的缺陷。
4 对比分析
公路、隧道、桥梁裂缝由于特点各异,因此所需采集设备和识别算法不同。本文对3种类型裂缝的特点及检测难点进行了详细的对比,如表7所示。
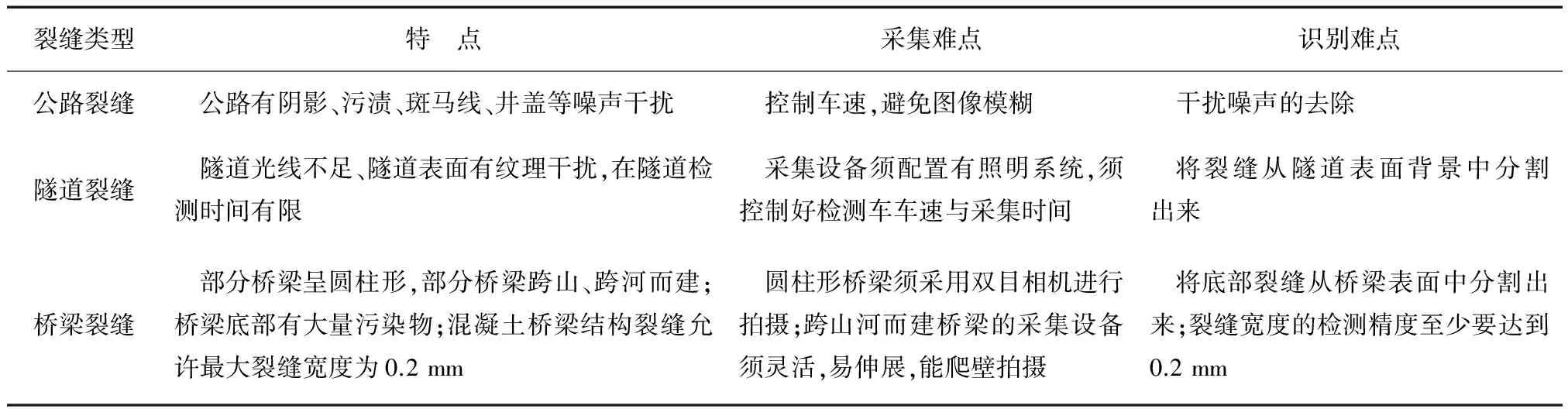
表7 3种类型裂缝检测对比
5 讨论
基于数字图像的自动检测技术是混凝土裂缝检测的发展趋势,具有广泛的应用前景;但是还有不少有待完善和改进之处。
1)急需建立科学完善的公路破损分析和评价系统,将破损形式、类别、等级及地点等传回系统,做到检测与修补的规范化和标准化。
2)针对特殊情况下(长距离、高速铁路隧道,跨山、跨河而建的桥梁等)的裂缝,现有自动检测方法在图像采集与目标提取方面较为困难,需要一种不同于公路检测且快速准确的裂缝检测系统。
3)现有裂缝自动检测方法的数据采集率和准确率有待进一步提高,裂缝信息采集及自动检测有待进一步智能化和实时化。
4)针对检测指标单一、检测算法不具有通用性的不足,今后应致力于研究功能更全面、检测效果更好的混凝土裂缝自动检测系统。
此外,基于数字图像的三维重构技术的裂缝自动检测具有更稳定的性能和更高的检测精度,可作为未来的重点研究方向之一。
6 总结
本文分别从采集设备和识别算法2方面对公路、隧道和桥梁3种类型混凝土裂缝的检测方法进行了全面分析。分析发现,由于3种类型混凝土裂缝特点不同,因此所需硬件设备和检测算法不同。总体来说,混凝土裂缝检测的硬件设备功能有待进一步完善,且准确度和实时性等方面还未达到满意的效果,检测算法尚存在精度与速度的矛盾。
不难预测,研究实时、高效、功能全面的裂缝检测系统和基于数字图像的三维重构技术的裂缝自动检测是未来混凝土裂缝检测发展的重要方向之一,具有良好前景。
[1]FUKUHARA Toshihiko,TERADA Keiji,NAGAO makoto, et al. Automatic pavement-distress-survey system[J]. Journal of Transportation Engineering, 1990, 116(3):280.
[2]WANG K C P. Designs and implementations of automated systems for pavement surface distress survey[J]. Journal of Infrastructure Systems, 2000, 6(1):24.
[3]MATE Sršen. Automatic road analyzer-ARAN[J]. Gradevinar, 2002, 54(5):275.
[4]孙波成. 基于数字图像处理的沥青路面裂缝识别技术研究[D]. 成都:西南交通大学,2014.
[5]郝灵恩. 多功能道路检测车发展综述[J]. 四川水泥, 2017(2):136.
[6]高飞. 道路综合信息采集系统的研究与实现[D]. 西安:长安大学, 2009.
[7]啜二勇. 国内路面自动检测系统研究历程及展望[J]. 中国高新技术企业, 2009(19):195.
[8]张娟, 沙爱民, 孙朝云,等. 路面裂缝自动识别的图像增强技术[J]. 中外公路, 2009, 29(4):301.
[9]CHENG H D, CHEN J R, GLAZIER C, et al. Novel approach to pavement distress detection based on fuzzy set theory[J]. Journal of Computing in Civil Engineering, 1999, 13(4):270.
[10]高建贞, 任明武, 唐振民,等. 路面裂缝的自动检测与识别[J]. 计算机工程, 2003, 29(2): 149.
[11]WU Jinhui, ZHAO Maotai, WU Bo. Improved pavement distress detection based on contourlet transform and multi-direction morphological structuring elements[J]. Advanced Materials Research, 2012, 466:371.
[12]陈利利. 基于多尺度图像分析的路面病害检测方法研究与分析[D]. 南京:南京理工大学, 2009.
[13]闫茂德,伯绍波,李雪,等.一种自适应模糊的局部区域图像增强算法[C]//第二十六届中国控制会议论文集.北京:北京航空航天大学出版社,2007:308-311.
[14]欧阳琰, 陈先桥, 初秀民. 路面破损图像的模糊增强方法研究[J]. 计算机工程与应用, 2012, 46(10):184.
[15]邓若曦, 王展青. 基于小波变换的路面破损图像降噪增强算法[J]. 武汉理工大学学报(信息与管理工程版), 2013, 35(5):678.
[16]ZUO Y, WANG G, ZUO C. Wavelet packet denoising for pavement surface cracks detection.[C]// International Conference on Computational Intelligence and Security. Suzhou:IEEE, 2008:481-484.
[17]王兴建, 秦国锋, 赵慧丽. 基于多级去噪模型的路面裂缝检测方法[J]. 计算机应用, 2010, 30(6):1606.
[18]王澍.复杂背景下路面裂缝图像自动检测与识别算法研究[D]. 武汉:武汉工程大学, 2013.
[19]KIRSCHKE K R, VELINSKY S A. Histogram-based approach for automated pavement-crack sensing[J]. Journal of Transportation Engineering, 1992, 118(5):700.
[20]SIRIPHAN J. Development of a new digital pavement image processing algorithm for unified crack index computation[D]. Utah:The University of Utah, 1997.
[21]CHENG H D, SHI X J, GLAZIER C. Real-time image thresholding based on sample space reduction and interpolation approach[J]. Journal of Computing in Civil Engineering, 2003, 17(4):264.
[22]KATAKAM N. Pavement crack detection system through localized thresholding[D]. Toledo:The University of Toledo, 2009.
[23]姜吉荣. 基于图像分析的路面裂缝检测方法与识别研究[D]. 南京:南京邮电大学, 2016.
[24]SHAH S. Automatic cell image segmentation using a shape classification model[C]//Proceeding of LAPR Conference on Machine Vision Applications. Tokyo: Machine Vision Applications, 2007:428-432.
[25]WANG Hua, ZHU Ning, WANG Qi. Segmentation of pavement cracks using differential box-counting approach[J]. Journal of Harbin Institute of Technology, 2007, 39(1):142.
[26]张娟, 沙爱民, 孙朝云,等. 基于相位编组法的路面裂缝自动识别[J]. 中国公路学报, 2008, 21(2):39.
[27]瞿中, 林丽丹, 郭阳. 形态学与区域延伸相结合的图像裂缝检测算法研究[J]. 计算机科学, 2014, 41(11):297.
[28]OLIVEIRA H, CORREIA P L. CrackIT-An image processing toolbox for crack detection and characterization[C]//IEEE International Conference on Image Processing (ICIP). Paris:IEEE, 2014:798-802.
[29]SORNCHAREAN S, PHIPHOBMONGKOL S. Crack detection on asphalt surface image using enhanced grid cell analysis[C]//Proceedings of the 4th IEEE International Symposium on Electronic Design, Test and Applications. Hong Kong:IEEE, 2008: 49-54.
[30]MIGUEL G, DAVID B, OSCAR M, et al. Adaptive road crack detection system by pavement classification[J]. Sensors, 2011, 11(10):9628.
[31]郭阳. 改进渗流模型的混凝土路面图像裂缝检测算法研究[D]. 重庆:重庆邮电大学, 2016.
[32]LEE JUN S, CHOI Il-Yoon, LEE Hee-Up,et al.隧道检测系统及其在韩国高速铁路隧道的应用[J]. 中国铁道科学, 2004, 25(3):21.
[33]赵海伟. 路面裂缝三维检测算法研究[D]. 西安:长安大学, 2015.
[34]YU S N, JANG J H, HAN C S. Auto inspection system using a mobile robot for detecting concrete cracks in a tunnel[J]. Automation in Construction, 2007(16):255.
[35]肖书安. 隧道测量技术的发展新方向:隧道扫描技术在德国纽伦堡—英戈施塔特高速铁路竣工测量中的应用[C]//2006中国高速铁路隧道国际技术交流会论文集. 北京:中国铁道出版社,2006:653-657.
[36]LEUNG C K Y, WAN K T, INAUDI D, et al. Review: optical fiber sensors for civil engineering applications[J]. Materials & Structures, 2015, 48(4):871.
[37]胡皙. 基于图像处理的地铁隧道裂缝检测技术研究[D]. 北京:北京交通大学, 2014.
[38]成艳枝. 基于图像处理的隧道衬砌裂缝检测系统设计与研究[D]. 太原:太原理工大学, 2015.
[39]亓大鹏. 地铁隧道图像数据分析系统[D]. 北京:北京交通大学, 2016.
[40]BISWAS P, SUFIAN S A, MYNUDDIN M. Deblurring. Images using a Wiener filter [J]. International Journal of Computer Applications, 2015, 109(7):36.
[41]钟涛, 张建国, 左俊彦. 一种改进的中值滤波算法及其应用[J]. 云南大学学报(自然科学版), 2015, 37(4):505.
[42]李晋惠. 公路路面裂缝类病害图像处理算法研究[J]. 计算机工程与应用, 2003, 39(35):212.
[43]GAN Shuwei, WANG Shoudong, CHEN Yangkang, et al. Separation of simultaneous sources using a structural-oriented median filter in the flattened dimension[J]. Computers & Geosciences, 2016, 86(C):46.
[44]朱磊, 徐佩霞. 一种倒数加权的窗口自适应邻域图像滤波算法[J]. 测控技术, 2006, 25(5):33.
[45]朱其刚. 基于像素特征的路面裂缝图像自适应滤噪[J]. 山东师范大学学报(自然科学版), 2005, 20(3):37.
[46]刘晓瑞, 谢雄耀. 基于图像处理的隧道表面裂缝快速检测技术研究[J]. 地下空间与工程学报, 2009, 5(S2):1624.
[47]MUDULI P R, PATI U C. A novel technique for wall crack detection using image fusion[C]//2013 International Conference on Computer Communication and Informatics (ICCCI). Coimbatore:IEEE, 2013:1-6.
[48]王耀东, 余祖俊, 白彪,等. 基于图像处理的地铁隧道裂缝识别算法研究[J]. 仪器仪表学报, 2014, 35(7):1489.
[49]朱鑫. 隧道结构表面病害特征快速检测研究[D]. 成都:西南交通大学, 2014.
[50]AMHAZ R, CHAMBON S, IDIER J, et al. Automatic crack detection on two-dimensional pavement images: an algorithm based on minimal path selection[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10):2718.
[51]刘学增, 叶康. 隧道衬砌裂缝的远距离图像测量技术[J]. 同济大学学报(自然科学版), 2012, 40(6):829.
[52]王春薇. 隧道裂缝图像智能匹配与变化趋势检测算法研究[D]. 北京:北京交通大学, 2017.
[53]陈瑶,梅涛,王晓杰,等. 基于爬壁机器人的桥梁裂缝图像检测与分类方法[J]. 中国科学技术大学学报, 2016, 46(9):788.
[54]OH J K, JANG G, OH S, et al. Bridge inspection robot system with machine vision[J]. Automation in Construction, 2009, 18(7):929.
[55]邹大鹏, 吴百海, 赖亚勇,等. 智能视频桥梁检测车工作臂超声探障系统研究[J]. 机床与液压, 2010, 38(13):74.
[56]YANG Y S, YANG C M, HUANG C W. Thin crack observation in a reinforced concrete bridge pier test using image processing and analysis[J]. Advances in Engineering Software, 2015, 83:99.
[57]曾凌, 李绍彬. 三维激光扫描的龙脑桥裂缝检测技术[J]. 激光杂志, 2017, 38(2):13.
[58]张维峰, 刘萌, 杨明慧. 基于数字图像处理的桥梁裂缝检测技术[J]. 现代交通技术, 2008, 5(5):34.
[59]尹周平, 宋俊, 余其竞,等. 一种混凝土桥梁底面裂缝检测装置:中国, CN201110094062.X [P]. 2011-11-16.
