快背式MIRA模型射流主动控制气动减阻研究
2018-02-02侯园章李春林杨彦君
田 思,侯园章,吴 敏,朱 玲,李春林,杨彦君
(1.奇瑞上海技术中心, 上海 200120;2. 中国汽车工程研究院股份有限公司, 重庆 401120)
随着科技的进步,数值仿真技术得到快速发展,越来越多地应用于工程实际中,汽车空气动力学的数值模拟也可以通过计算机技术来实现。计算流体动力学也被称作CFD[1],它是用计算机数值计算去研究流体力学的一门学科,也是研究汽车空气动力学的一种手段,计算机技术的进步使得数值仿真的效率和仿真结果的可靠度都有很大的提升[2]。车辆外流场的流动结构是很复杂的,而且气体的流动特征是不规则的,外流场仿真的精确度受到很多因素的影响,主要有几何模型的前处理及建模、网格划分的类型、物理模型的选取、计算资源的供给和仿真策略的制订等[3]。气体流过车身后会在车身尾部产生流动分离,气体分离后在尾部产生一个负压区,从而产生较大的气动阻力。通过分析车身尾流的流动结构,可以知道压差阻力产生的原因,采用相应的尾流控制措施,可以减小车辆的气动阻力[4]。流动控制技术主要有被动控制与主动控制这2大类,目前比较常见的流动控制技术是被动控制方式,它的措施简单,且确定后即可保持不变,如导流罩、扰流板等[5]。主动控制方式与之相反,它的控制是实时、动态的,且随流动的变化而改变,常见的有定常射流技术、合成射流技术、抽吸和吹除等[6]。气体的黏性作用使气流在物体表面形成一层很薄的附面层,当气体流动出现速度差,超过一个转捩点时,就会发生分离流动,通过一定的流动控制手段,可以改变气流的分离,从而实现减阻效果[7]。针对外流场的仿真精确度,前人已经做了很多这方面的研究工作,本文参考吉林大学的一篇硕士论文[8],使用CFD仿真软件STAR-CCM+,从网格的类型、湍流模型、网格的尺寸这3个方面进行考虑[9],采用准确度高的CFD仿真策略,在确保软件仿真精确度的前提下,使用雷诺时均法SSTk-w湍流模型对快背式MIRA模型进行射流主动控制气动减阻研究。首先,根据前人所做的研究,选定快背式MIRA模型尾部可能有效的5个位置作为研究对象,在固定了射流孔的形状后,采用定常射流的方式,通过改变射流速度的大小,分别研究了这5个射流位置下,不同射流速度对模型阻力的影响,并研究了射流孔的数量对模型减阻的影响,实现了一定程度的减阻,分析了减阻机制,对射流主动控制减阻的研究有重要意义[10]。
1 模型的选择及方案设定
1.1 模型选取
研究汽车气动特性的标准模型有多种,其中常见的模型有MIRA模型,前人对MIRA模型进行了大量的仿真与风洞试验,有丰富的经验数据可以参考[11]。本文选用快背式MIRA模型作为研究对象,标准MIRA模型示意图如图1所示,尺寸参数如表1所示。为了研究方便,本文选用1/4大小的MIRA模型。
1.2 仿真方案设定
MIRA模型的形状更接近实车,它的尾流结构较为复杂,模型周围外流场的变化,影响模型表面压力的分布,从而决定了阻力系数的大小,表面压力又受尾部分离涡的影响较大;因此,本文减阻的重点在于控制模型的尾部分离涡[12]。传统的减阻方式是被动控制减阻技术,通过改变局部特征去改善流体的流动特性[13],从而实现减阻。本文采用主动控制的方式,对流场施加外部激励,对流场输入能量去改变外部流场的流动特性,通过对射流的布置参数的优化来寻找最优射流方案,以减小MIRA模型的气动阻力。
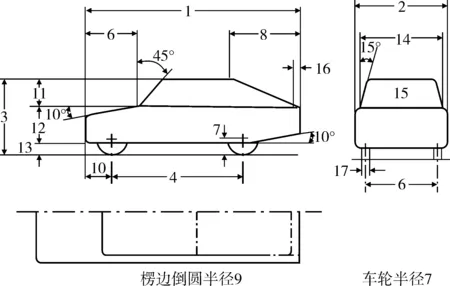
图1 MIRA模型示意图
序号名称尺寸/mm1总长 41652总宽 16253总高 14214轴距 25405轮距 12706发动机罩长度10557车轮半径 3058后端长度 13209倒角半径 152
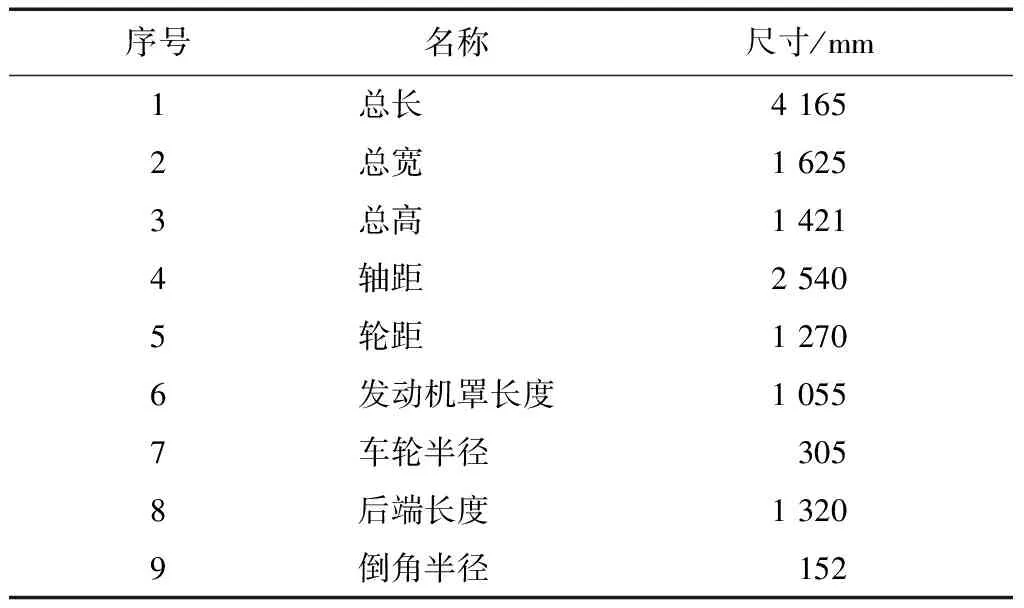
本文参照文献[8]所做的研究,采用固定的射流孔形状,垂直射流的方式,固定射流孔的位置,研究射流速度对尾流结构的影响。由前人所做的研究可知,比例模型的阻力主要是压差阻力,这与模型的尾流结构直接相关;因此,射流孔的位置设置在尾部区域[14],如图2所示。
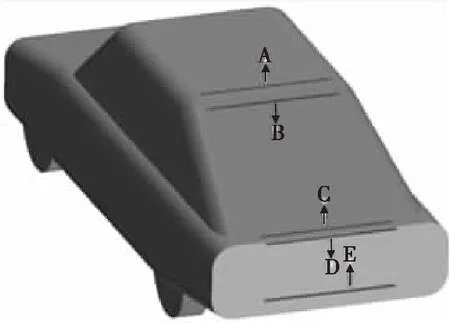
图2 MIRA模型尾部开孔示意图
本文研究对象为1/4大小的MIRA模型,采用的射流孔形状是一致的,采用的射流孔形状为两端是圆型的矩形射流孔,射流孔关于模型的纵轴线是对称的,两端圆心的距离为221.6 mm,两端圆弧的半径为1.5 mm,孔的深度为10 mm,射流孔的具体尺寸如图3所示,图4分别为A、B、C、D、E 5个位置下射流孔横向对称线到模型最近分离边界的距离。
图3 射流孔尺寸
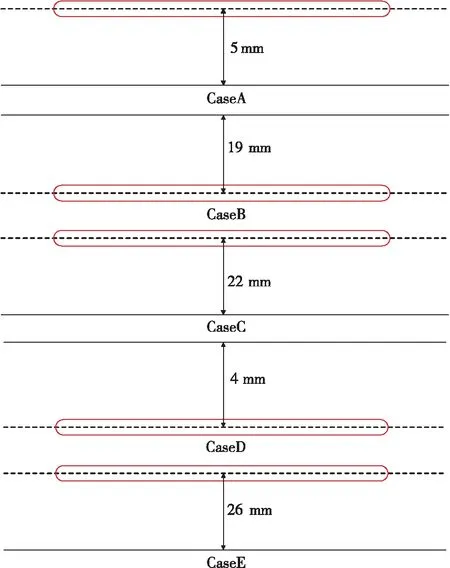
图4 射流孔位置
2 计算模型设置
本仿真采用1/4快背式MIRA模型,用整车模型的阻力系数Cd作为评价指标,研究主动控制减阻技术对减小整车阻力的作用。本文采用的数字风洞为16 m×4 m×2.5 m的长方体计算域,模型的阻塞约为1%,基本满足了要求的阻塞比[15]。选择合适的计算域,模型距入口的距离约为模型长度的5倍,模型距出口的距离约为模型长度的9倍,这样的设置使模型周围有足够大的空间,使它附近特别是尾部的空气流动能够充分发展。为保证与风洞试验的数据保持一致,设定60 m/s的来流速度,雷诺数Re为4.29×106,湍流强度小于0.5%[16]。由于空气相对于汽车的流速低于0.3马赫数,在汽车外流场的仿真中,空气可以被看做是理想的气体[17],具有不可压缩性。我们采用离散控制方程,应用有限体积法去求解。在求解器的设置方面,空间离散格式对计算的稳定性有较大影响,松弛因子对控制方程的求解速度有较大影响,这2个因素都影响着计算结果的精确性。本文采用适中的松弛因子和满足二阶精度的离散格式[18]。
图1模型设定三级加密体,为了保证计算结果的精确性,第一级加密体的网格尺寸设置得较小些。为了更接近实际工况,需要对边界层进行模拟,边界层网格设置为5层的棱柱层网格,边界层厚度为6 mm,边界层网格增长比为1.2,图6为边界层网格示意图。考虑到边界函数对仿真精确度的影响,本文通过调整网格的大小,使计算模型的Y+值处于经验值之间,确保对边界层流动的仿真更准确[19]。
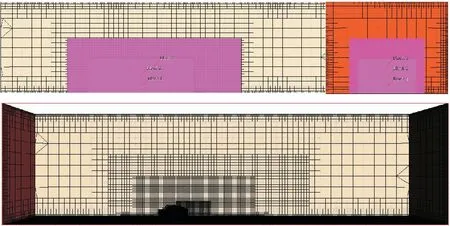
图5 几何模型与网格空间整体布置图
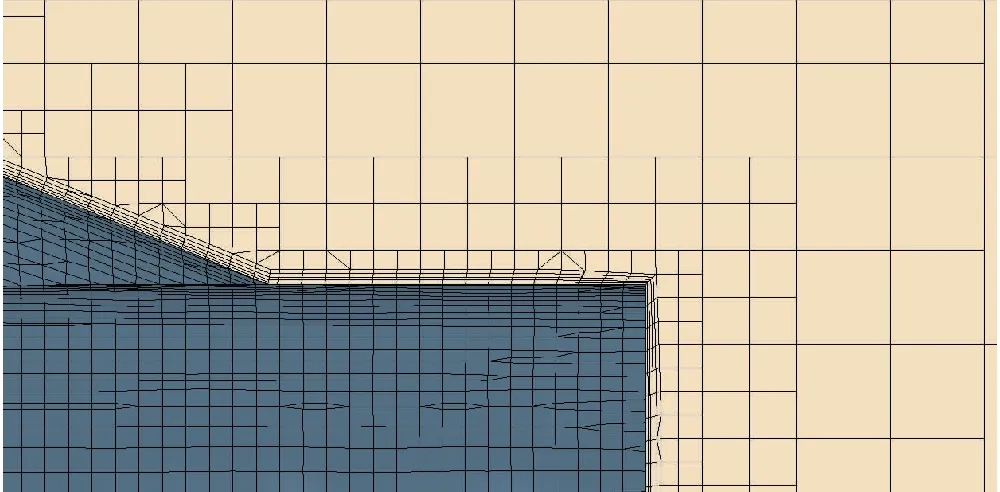
图6 边界层网格示意图
计算模型的物理条件及求解参数设置如表2所示。
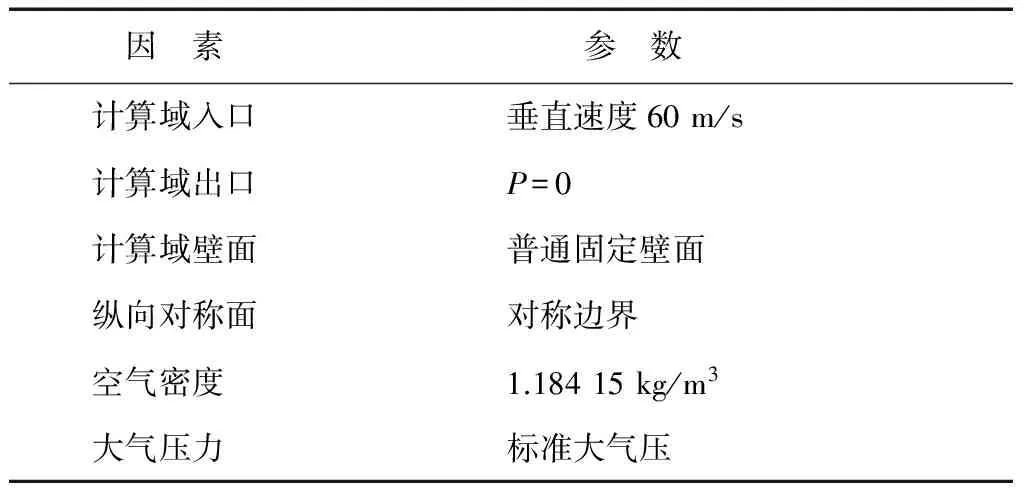
表2 仿真相关参数设置
3 仿真结果分析
3.1 第一轮仿真分析
1.2节介绍了射流孔的布置方案及开口形状,采用两端呈圆弧的矩形射流孔,孔的具体尺寸参数见上文,这里不再赘述,分别对A、B、C、D、E 5个位置的射流方案进行仿真计算,根据经验,给定5~50 m/s的速度区间,以5 m/s为间隔,总共10种速度方案,通过计算给定位置下不同射流速度的模型,得到50个计算结果,如表3所示。在保证计算精确度的基础上,计算得到各工况下模型的阻力系数。为使误差降到最低,仿真的结果均精确到小数点后第4位即万分位,且取后500步计算结果的平均值作为最终评价指标。
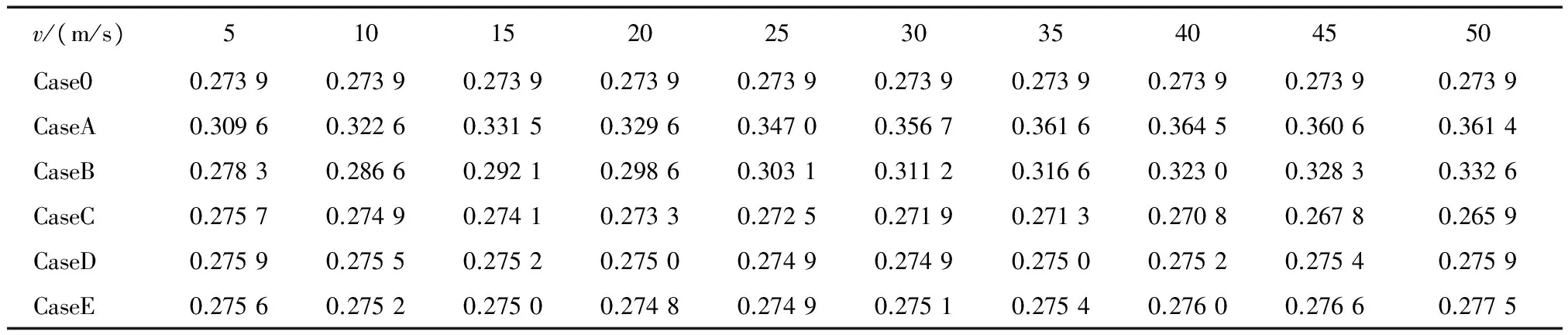
表3 初步仿真结果
为了方便观察减阻方案的变化趋势以及更好地与原始数模进行对比,现将表3中的数据做成一个折线图,如图7所示。图中Case0为给定的原始数模的阻力系数,在图中它是一条直线,用来做对比分析,数值在这条直线上方的方案,阻力增大,在直线下方的方案,阻力变小,有减阻效果。从折线图中可以看出CaseA、CaseB、CaseD、CaseE这4个位置的减阻工况都没有明显的减阻效果,其中最不好的是CaseA,它使模型的阻力增大很多,并且随着射流速度的增大,阻力有增大的趋势。其次减阻效果不好的方案是CaseB,它的阻力系数整体上是随着射流速度的增大而增大,并且有继续增大的趋势。虽然在射流速度为35 m/s的时候有个突变,但并没有多大的减阻效果。CaseD和CaseE这2个位置下的减阻方案没有明显的效果,但随着射流速度的增大,阻力有增大趋势。CaseC是减阻效果最好的工况,在低速射流时,模型的阻力系数变化不大,随着射流速度的增大,模型的阻力系数逐渐减小,速度到50 m/s时,阻力系数最小,并且阻力系数Cd有继续降低的趋势。后面将继续对CaseC这个位置的工况做研究,探究减阻机制。
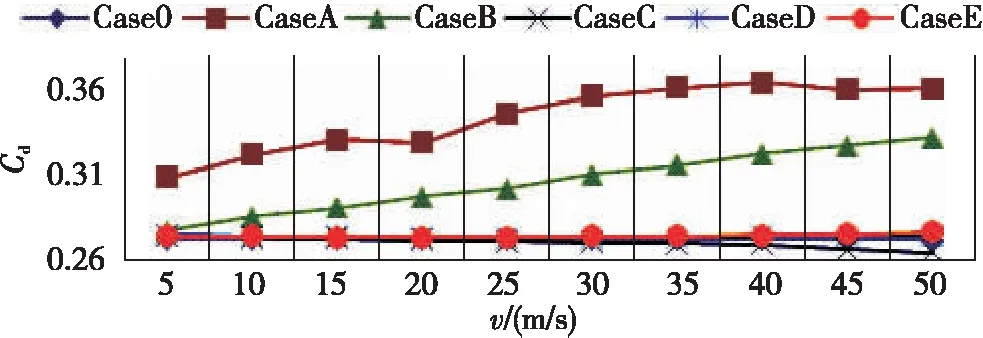
图7 不同工况下阻力系数对比图
3.2 第二轮仿真分析
经过第一轮的仿真分析,已经排除了CaseA、CaseB、CaseD、CaseE这4个位置下仿真工况。研究发现,在CaseC工况下,当采用高速射流时,模型的减阻效果更明显。下面给定55~100 m/s的速度区间,以5 m/s为间隔,总共10种速度方案,通过计算CaseC位置下不同射流速度的模型,得到10个计算结果。在这10个计算结果中,当射流速度为75 m/s时,模型阻力系数最小,为0.258 5。以75 m/s为基准,在它的两侧以1 m/s为间隔,增加8种射流方案,上述减阻方案的结果如表4所示。对比发现,在CaseC位置的减阻方案中,当射流速度为79 m/s时,有最好的减阻效果,此时模型的阻力系数为0.258 3,相比于原始数模,阻力系数降低了将近16个count,减阻效果明显。
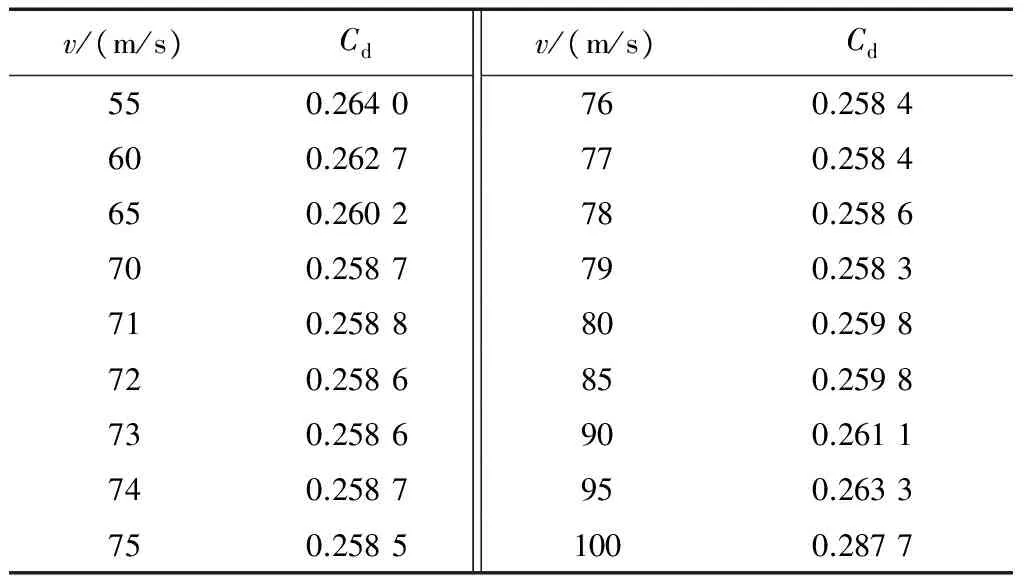
表4 第二轮仿真结果
3.3 对喷口数目的探索
在对预设的几个位置进行了研究之后,找到了减阻效果最好的工况,即在C位置采用79 m/s的射流,此时模型的阻力系数为0.258 3。接下来分析射流孔的数目对减阻效果的影响,在CaseC的基础上,在靠近模型尾部的方向上增加一个射流孔,射流孔的尺寸同前文所述,此方案命名为CaseC2,新增射流孔的横轴线距离原来孔的横轴线5 mm,新增射流孔也关于模型的纵轴线对称。在靠近模型尾部方向上增加第3个射流孔,布置如前所述,此方案命名为CaseC3,新增方案布置示意图如图8所示,新增射流孔的位置参数如图9所示。
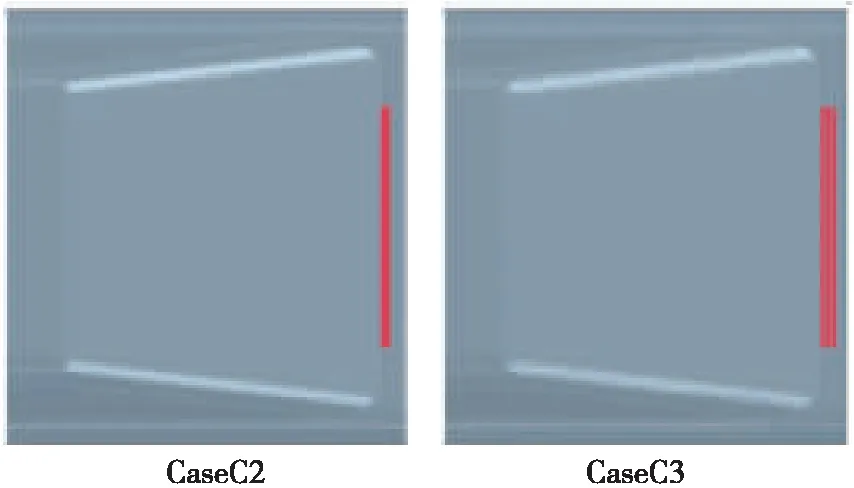
图8 增加射流孔数的方案示意图

图9 射流孔布置图
新增方案CaseC2、CaseC3中的射流孔的射流速度都为79 m/s,经过仿真计算,得到C位置下3种工况的阻力系数,如表5所示。

表5 第二轮仿真结果
从表5可以看出,增加射流孔的数量后,模型的阻力系数不但没有减小反而增大,且都比原始数模的阻力系数大很多,说明在此设想下,增加射流孔的数量这种方案不可行。
3.4 后处理分析
通过之前的分析,确定了最佳减阻方案,即在C位置开孔,射流速度为79 m/s的方案,此时的阻力系数为0.258 3。下面将对这种方案的计算结果做可视化分析,研究射流减阻的减阻机制。
图10为标准快背式MIRA模型与最优减阻工况的尾部俯视压力云图。可知,最优减阻工况斜面上的压力相较于标准模型有所增大,高压区域增大,这就有效地减小了模型的压差阻力。
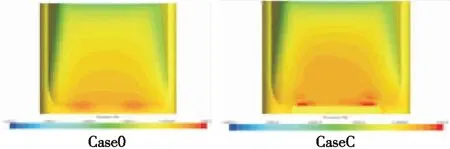
图10 尾部压力云图(俯视)
图11为标准快背式MIRA模型与最优减阻工况的尾部后视压力云图。可知,最优减阻工况背部的压力相较于标准模型有所增大,高压区域增大,这就有效地减小了模型的压差阻力。
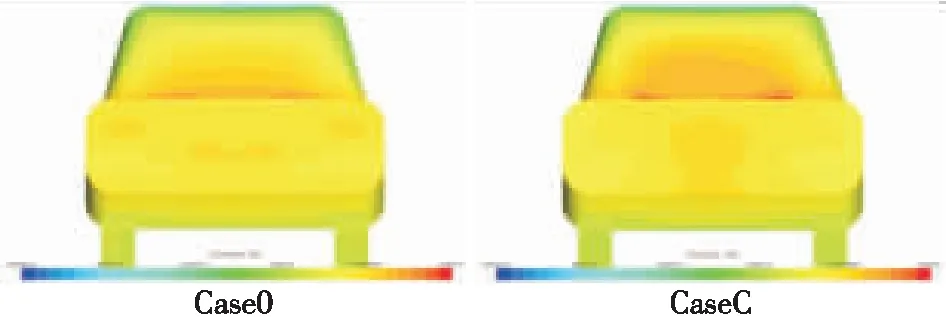
图11 尾部压力云图(后视)
图12为标准快背式MIRA模型与最优减阻工况的纵向对称面上的速度矢量图。可以看到,优化模型的尾部分离涡远离车体,分离区域增大,延迟了车体表面气流的分离。这是导致模型表面压力增大的主要原因,有利于减小模型的压差阻力。在射流孔的前方,有较小的回流,会有一定的能量损耗,但这并不影响模型整体的降阻效果。
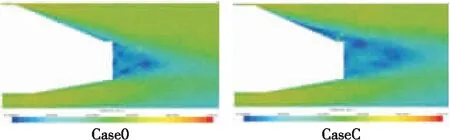
图12 纵向对称面上速度矢量图
图13为标准快背式MIRA模型与最优减阻工况的尾部10 mm处横截面上的速度云图。可以看出减阻方案尾部斜面上的分离区域有所扩展,分离区域增大,尾流气流的流动得到较好的改善。
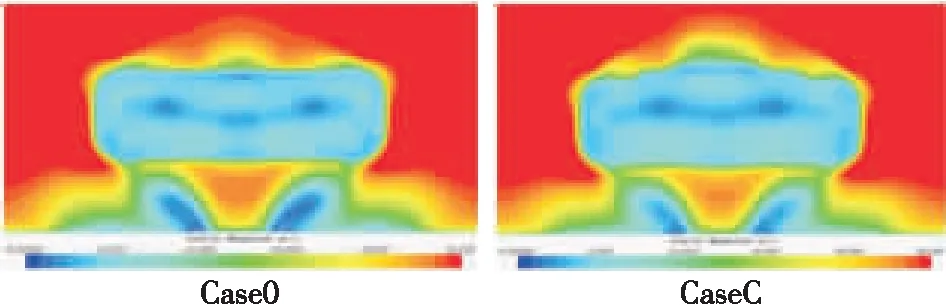
图13 尾部10 mm处横截面上速度云图
4 结论
本文使用数值模拟的方法,采用定常射流的方式,对快背式标准MIRA模型做了减阻研究,通过主动控制的手段实现了对外流场流动的控制,对模型尾部各个可能有效的位置做了仿真分析,探究了射流速度对减阻效果的影响,有较好的减阻结果。可以得到以下结论:
1)MIRA模型的主要阻力来自于压差阻力,减阻的重点在于改善模型尾部的流场,在设置的5个可能有效位置中,有减阻效果的只有C位置。
2)射流的速度影响减阻的效果,研究发现,在C位置下,当射流速度为79 m/s时,模型的阻力系数为0.258 3,相比于原始数模,阻力系数降低了将近16个count,减阻效果明显。
3)在最佳减阻方案中,射流改变了模型尾部区域气流的流动,使流过车体表面的气流延迟分离,分离区域增大,增大了模型尾部的负压,从而使模型整体的差压阻力减小。
[1]HUMINIC A, HUMINIC G. Numerical flow simulation for a generic vehicle body on wheels with variable underbody diffuser[J]. Sae Technical Papers, 2012,1:0172.
[2]张英朝.基于仿真与试验的汽车风洞修正研究[D].长春:吉林大学,2010.
[3]CARIDI D, COKLJATETC D. Embedded large eddy simulation of flow around the Ahmed body[J]. Sae International Journal of Commercial Vehicles, 2012,5(1):208.
[4]RAO D M, KARIYA T T. Boundary-layer submerged vortex generators for separation Control-an exploratory study[C]//AIAA,ASME,SIAM and APS National Fluid Dynamics Congress,Washington,DC,American Institute of Aeronautics and Astronautics,1988:839-846.
[5]张英朝,丁伟,陈涛,等.商用车驾驶室导流罩气动造型设计[J].汽车工程,2014,36(9):1063.
[6]BRUNN A, NITSCHE W. Active control of turbulent separated flows over slanted surfaces[J]. International Journal of Heat and Fluid Flow, 2006,27(5):748.
[7]TAYLOR H D.The elimination of diffuser separation by vortex generators[R].United Aircraft Corporation Report No. R-4012-3, 1947.
[8]田思.Ahmed模型射流主动控制气动减阻策略研究[D].长春:吉林大学,2016.
[9]邵书鑫.汽车外流场精确仿真与尾部凸起结构减阻控制研究[D].长春:吉林大学,2014.
[10]SPOHN A, GILLIERON P. Flow separations generated by a simplified geometry of an automotive vehicle [C]//IUTAM Symposium: Unsteady Separated Flows, 2002.
[11]王佳,杨志刚,朱晖.阶背式MIRA模型气动阻力数值模拟网格无关性研究[J].佳木斯大学学报(自然科学版),2012,30(3):345
[12]AHMED S R, RAMM G, FALTIN G. Some salient features of the time averaged ground vehicle wake[J].Sae Paper,1984: 840300.
[13]MOREL T. Aerodynamic drag of bluff body shapes characteristic of hatch-back cars[C]//Automotive Engineering Congress and Exposition,1978.
[14]KHALIGHI B, ZHANG S, KOROMILAS C. Experimental and computational study of unsteady wake flow behind a bluff body with a drag reduction device[J]. Sae Paper, 2001,01B:207.
[15]ANDERSON J D.计算流体力学基础及其应用[M].吴颂平,刘赵淼,译.北京:机械工业出版社,2007.
[16]BRUNEAUETC C H. Coupling active and passive techniques to control the flow past the square back Ahmed body[J]. Computers & Fluids, 2010,30(6):049.
[17]李凤蔚.空气与气体动力学引论[M].西安:西北工业大学出版社,2007.
[18]王福军.计算流体动力学分析[M].北京:清华大学出版社,2004.
[19]JOHN D, ANDERSON J R. 计算流体力学入门[M].姚朝晖,周强,译.北京:清华大学出版社,2010.
