仿生肌电假手的触滑觉功能及其实现①
2017-02-10姜明文张西琳张济川
姜明文,张西琳,张济川
仿生肌电假手的触滑觉功能及其实现①
姜明文1,张西琳2,张济川1
目的探讨利用压电薄膜聚偏二氟乙烯(PVDF)实现仿生肌电假手的触滑觉功能。方法分析压电材料PVDF的特点和压电特性,研究由PVDF构成的触滑觉传感器的信号产生原理及其在肌电假手上的实现,设计压电信号调理电路和PVDF触滑觉反馈控制系统,制成实验样手,进行触滑觉功能实验。结果与结论本文采用的触滑觉反馈方法,反馈信号特征明显,效果良好,实用可靠。
仿生肌电假手;触滑觉反馈;压电传感器
[本文著录格式] 姜明文,张西琳,张济川.仿生肌电假手的触滑觉功能及其实现[J].中国康复理论与实践,2017,23(1): 110-113.
CITED AS:Jiang MW,Zhang XL,Zhang JC.Tactile and slip sensory functions for electromyogram controlled bionic prosthetic hand and realization[J].Zhongguo Kangfu Lilun Yu Shijian,2017,23(1):110-113.
人工肌电假手虽然可在患者意识控制下实现结构和运动功能仿生动作,但对外部环境和物理因素没有感知功能,主要靠人的视觉判断手是否接触到物体。设计具有感觉功能的肌电假手,可以实现人工肌电假手的全面仿生要求。
对于肌电假手,实用的主要感觉功能是力觉、触觉和滑觉。感觉功能有两类实现方案:大闭环感觉反馈方案和小闭环感觉反馈方案。两种方案都需要利用视觉反馈,判断手与目标物的接近程度。
1 闭环触滑觉反馈
传统肌电假手对被握取的物体没有触觉(tactile sense)和滑觉(sliding sense)。如果假手装备有大闭环力反馈装置,触觉可以由力觉宏观替代,但代替不了滑觉。滑觉对假手握物的可靠性和安全性有重要意义,是功能仿生的重要功能指标。假手的触滑觉功能一般采用小闭环方式实现,即不通过人体介质的感觉,直接经装在假手上的反馈装置实现小闭环反馈,由假手本身自动判断是否接触到物体和物体是否有滑脱趋势。
触滑觉传感器有很多形式,如开关式、光电式、气压式、电容式、电磁式、压阻式、压电式等。其中,由压电材料组成的压电式触滑觉传感器有结构上的优点。具有压电特性的材料也很多,如锆钛酸铅压电陶瓷(lead zirconate-titanate piezoelectric ceramic, PZT)、聚偏二氟乙烯(polyvinylidence floride,PVDF)等。
2 PVDF的特点和压电特性
PVDF是一种高分子聚合物型压电材料,它由许多单体偏二氟乙烯聚合而成,分子式为[CH2-CF2-]n(n是分子数,约为2000~12000),分子量40万~60万,结晶度60%~80%,氟含量59%。自1969年Kawai发现其具有很强的压电性能以来,PVDF在各领域有广泛应用。Matsumoto等[1]利用PVDF的压电特性监测结构的变形情况。Hodges等[2]将PVDF材料安装在小型武器装置上,用于检测武器装置在发射时的振动。在医疗相关领域,Wang等[3]将PVDF固定在胸腔上,用于心肺监控,主要测量睡眠状态下呼吸和心脏跳动引起的波动信号,信号处理主要采用多尺度小波分解。还有关于PVDF在低频加速度传感器上用于测量加速度的研究。
PVDF具有很好的压电性能。作为压电敏感材料,PVDF有以下优点:①压电常数高,柔性和加工性能良好,声阻抗低;机械强度高、频响宽;②分子结构中包含氟,化学稳定性,耐疲劳性高,吸湿性低,并有良好的热稳定性;③具有高介电强度,可耐受强电场作用;④质量轻,密度是PZT的1/4。
压电效应是指某些介质沿一定方向对其施加力使之产生变形时,介质内部产生极化现象,并在某两个表面产生等量异号电荷;去掉外力后,又恢复不带电状态的物理现象。介质所产生的电荷量与外力大小成正比,比例系数为压电常数,它与机械变形方向有关。压电晶体材料在弹性变形范围内,在受力状态下所产生的电荷密度与作用力成线性关系。
PVDF微单元材料的受力关系如图1。压电晶体在弹性变形范围内,电荷密度与应力之间的关系可由式(1)表示,其中δ1、δ2、δ3为三个平面上的电荷量;σ1、σ2、σ3为三个平面的轴向应力;τ1、τ2、τ3为切向应力;D=[dij]为压电系数矩阵,其中i为产生电荷的面,j代表施加作用力的方向。
对应于微单元上的力矢量F={σ1,σ2,σ3,τ1,τ2,τ3},且d15=d24≈0,则压电系数矩阵为式(2)所示。

由式(2)可知,不是在所有方向上都有压电效应,其中不为0的三项压电系数能使Z方向布置的电极产生压电效应。
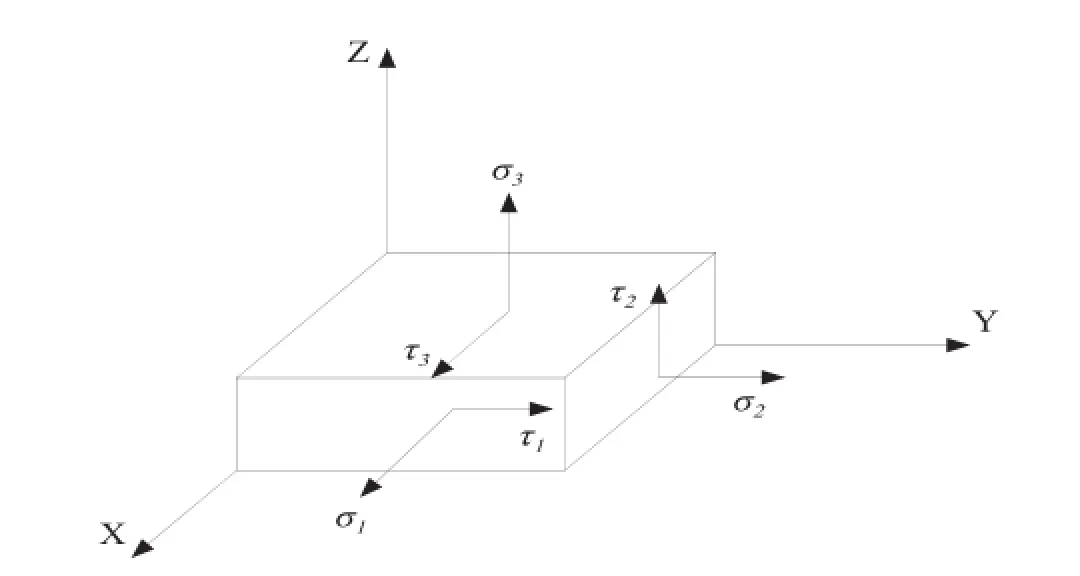
图1PVDF微单元材料的受力关系图
PVDF用热成形法加工成薄膜状。当PVDF聚合物从熔融状态冷却时,主要生成α相PVDF晶体,无压电效应;在经过拉伸和高压极化后形成β相,具有很强的压电效应。β晶体结构是极性晶体,受外力作用时,薄膜变形,晶体发生位移,在膜的上下两极生成电荷,产生压电效应。PVDF在极化方向和拉伸方向有较大的压电系数,其中极化方向的压电效应最大(图2)。

图2PVDF拉伸与极化方向
3 PVDF传感器信号产生机理
利用PVDF压电薄膜制成的触滑觉传感器结构如图3。基底为绝缘材料,薄膜状PVDF压电材料的下表面与基底粘接,上表面与带有锯齿形(以列阵式凸点排列)粗糙橡胶表皮粘合。压电信号由PVDF薄膜上下两面的电极引出。在物体与传感器橡胶表皮接触产生压力时,PVDF变形生成电荷,形成触觉信号;在物体与传感器发生相对滑动时,物体表面与传感器表皮之间产生沿滑动方向的切向力,PVDF产生压电效应,形成滑觉信号。滑觉信号实际上是由很多触觉信号叠加而成。

图3PVDF触滑觉传感器构造示意图
PVDF触滑觉传感器的作用过程是,如果手抓握静止物体,则只有触觉信号产生;如果握住并企图提起较重的物体,则先有触觉后有滑觉信号产生(图4)。触觉信号和滑觉信号的特征有明显区别。滑觉信号是物体表面与传感器表面发生滑动时产生的响应信号。物体表面看似光滑,实际的微观结构分布着很多微小的凸峰,称为微凸峰。物体表面与传感器橡胶表皮相接触发生滑动时,物体表面的微凸峰与传感器表皮的微齿发生作用,使橡胶微齿发生变形,传递至下层PVDF,生成电荷,从而产生滑觉响应信号。

图4 触/滑觉试验的响应曲线
触觉信号和滑觉信号曲线特征不同。触觉信号是一个具有单一峰值的先上升后下降的曲线,滑觉信号是在一定时间内具有多个峰值的曲线;触觉信号的峰值振幅大于滑觉信号的峰值。
为了在同一信号中分离出触觉和滑觉信号,需要找到一种合适的特征值作为触觉和滑觉的判别依据。由于触觉有单一较高峰值,而且振幅大于滑觉信号,可以选择一定长度信号的平均值作为触觉的特征值(图5)。滑觉是在单位时间内有多个幅值较小的峰值,因此可选择一定长度信号的方差作为滑觉的特征值(图6)。
如果给定一个阈值,即可在超过阈值的两点判定为有触觉和/或滑觉产生。
4 触滑觉功能在肌电假手上的实现
在肌电假手的拇指上安装触滑觉传感器。传感器PVDF薄膜厚50µm,为增强灵敏度,将一片PVDF薄膜对折。压电信号由电极引出。
安装时,将PVDF材料连同基底材料弯曲成弧状,贴在拇指的柱形面上,用低噪声电缆线直接与电路板连接固定。包封表皮使用有纹路的橡胶材料。安装好的传感器用乳胶手套的指套套紧。
PVDF传感器的输出信号需要进行预处理。信号处理电路框图见图7。

图5 触觉信号的特征值获得

图6 滑觉信号的特征值获得

图7 信号处理电路框图
第一级电荷放大器采用高阻低噪声、低失调集成运算放大器,放大传感器输出的压电信号。为减小电荷放大器的输出电阻,增加电路带负载的能力,电路的第二级为电压跟随电路,主要起阻抗匹配的作用。电路的第三级为有源低通滤波器,是一个二阶的低通滤波器,用于完成电荷放大输出信号的滤波和滤去高频干扰信号。第四级为反相加法电路,因前端电路的输出为-5~5 V(满量程),因此反向叠加电压-5 V,放大0.5倍,使输出电压限定在0~5 V之间。此时空载输出电压为2.5 V(典型值)。当触滑觉传感器受力时,电路输出在0~5 V间变化。
经模拟电路处理,传感器信号输入到单片机中;单片机根据信号特征,判断触觉和滑觉,通过肌电假手的表面肌电电极,控制假手动作。PVDF触滑觉反馈控制假手系统框图见图8。
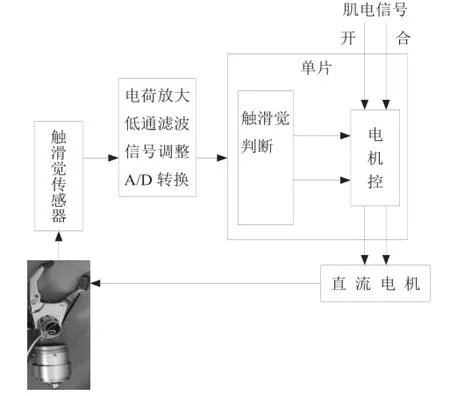
图8PVDF触滑觉反馈控制假手系统框图
控制系统的输入包括两个部分:触滑觉感知与手指开、合动作判断。
触滑觉感知部分根据触滑觉传感器的信号,运用触滑觉判断算法,判断物体是否被接触和是否有滑动趋势。完成这种判别需要对传感器反馈的响应信号进行处理,将信号响应转变为触觉和滑觉的有与无。手指开合动作需要由来自肌电假手表面肌电电极的开、合信号控制。直流电机的控制系统根据这两部分输入,驱动假手电机的正反转。
当有“合”信号时,电机正转驱动手指产生合手动作;当手指接触到物体,触滑觉传感器响应。如果手与物体接触不够紧,手与物体表面发生滑动,产生滑觉响应信号。控制电路在得到滑觉信号后,自动发送一定脉宽的脉冲宽度调制(pulse width modulation, PWM)波,使电机正转一定角度,以夹紧物体。如果发送PWM波后仍有滑觉响应,则继续发送,并加大脉宽,直到产生触觉信号为止。产生触觉响应信号,说明假手已经握紧物体。此时控制电路将发送占空比为1∶8的小脉宽PWM波,以维持假手的握紧状态,假手可以安全地将物体提起。
在这种控制方式下,滑觉和触觉信号实时反馈到控制电路中,对软硬不同的物体都可以准确地判断握取状态。
为验证肌电假手在安装触滑觉反馈装置后的性能,进行了实物握取试验,主要包括握取普通的玻璃杯、握取生鸡蛋,以及夹持纸张的滑拔试验。
试验证明,握取玻璃杯时,装有传感器的手指一旦接触到杯体,电机“合”的动作自动停止,可以安全地举起玻璃杯。在握取装有水的重杯子时,有滑觉响应,假手自动加大握力,直到没有滑觉信号为止。
在握取鸡蛋的试验中,假手在“合”的过程中碰到鸡蛋后,有触觉响应,假手停止“合”的动作。系统设定的触觉响应阈值不会将鸡蛋捏碎,可以保证安全地将其握起。传统的肌电假手,握紧与否需要使用者通过视觉判断;使用触滑觉传感器后,能够通过鸡蛋与传感器之间的触滑觉,即压力大小,判断是否握紧,可以安全地将鸡蛋握取,而不会捏碎,不需要视觉判断,可以避免意外情况发生。
为了测试触滑觉传感器的滑觉能力,用白纸进行滑拔测试。先使假手夹住一页纸,操作者将白纸拔出,这时假手的传感器表面与纸张发生相对滑动,产生滑觉响应信号,假手自动加力。如果缓慢滑拔,手指可不断加力,直至拉不动;如果拔出速度过快,假手将无法握紧。这需要对控制系统的在线计算能力和性能进行优化改进。
[1]Matsumoto E,Biwa S,Katsumi K,et al.Surface strain sensing with polymer piezoelectric film[J].NDT and E International, 2004,37(1):57-64.
[2]Hodges V,McCoy E,Toolson R.Polyvinylidene Fluoride (PVDF)gauges for measurement of output pressure of small ordnance devices[J].Propellants,Explosives,Pyrotechnics, 2000,25(1):13-18.
[3]Wang F,Tanaka M,Chonan S.Development of a PVDF piezopolymer sensor for unconstrained in-sleep cardiorespiratory monitoring[J].Journal of Intelligent Material Systems and Structures,2003,14(3):185-190.
[4]Daku F,Mohamed A,Prugger F.A PVDF transducer for low-frequency acceleration measurements[J].ISA Transactions,2004,43(3):319-328.
[5]罗志增,王人成.具有触觉和肌电控制功能的仿生假手研究[J].传感技术学报,2005,18(1):23-27.
[6]姜明文,王人成,罗志增等.具有触滑觉功能的肌电假手[J].清华大学学报,2004,44(8):1025-1028.
[7]罗志增,王人成.仿生电动假手的研究[J].仪器仪表学报, 2005,26(7):675-678.
[8]郑思竟.人体解剖学[M].北京:人民卫生出版社,1987.
Tactile and Slip Sensory Functions for Electromyogram Controlled Bionic Prosthetic Hand and Realization
JIANG Ming-wen1,ZHANG Xi-lin2,ZHANG Ji-chuan1
1.Department of Precision Instrument,Tsinghuan University,Beijing 100084,China;2.China Assisstive Device and Technology Centre for Persons with Disabilities,Beijing 100050,China
ZHANG Ji-chuan.E-mail:zjc-dpi@tsinghua.edu.cn
ObjectiveTo realize the tactile and slip sensory functions for electromyogram controlled prosthetic hand.MethodsThe piezoelectric membrane polyvinylidence floride(PVDF)was used to construct a transducer for the tactile and slip sensory feedback.The feature and piezoelectric response of PVDF and its mechanism of signal production were studied.The feedback control system was designed and a prototype for testing the tactile and slip sensor function was constructed and tested.ResultsandConclusionThe signal response of PVDF sensor is obviously,and the PVDF sensor can be used in practice.
bionic prosthetic hand;tactile and slip feedback;piezoelectric membrane sensor
10.3969/j.issn.1006-9771.2017.01.026
R496
A
1006-9771(2017)01-0110-04
2015-01-30
2016-03-03)
1.清华大学精密仪器系,北京市100084;2.中国残疾人辅助器具中心,北京市100050。作者简介:姜明文(1978-),男,汉族,吉林河口市人,硕士,工程师,主要研究方向:康复工程。通讯作者:张济川。E-mail:zjc-dpi@tsinghua.edu.cn。
