高轨星机BiSAR分辨率分析及成像参数优化设计
2017-01-09刘文康孙光才陈溅来邢孟道
刘文康 孙光才 陈溅来 邢孟道
高轨星机BiSAR分辨率分析及成像参数优化设计
刘文康 孙光才*陈溅来 邢孟道
(西安电子科技大学雷达信号处理国家重点实验室 西安 710071) (西安电子科技大学信息感知技术协同创新中心 西安 710071)
高轨SAR具有覆盖范围广,重访时间短的优势。但是如果采用高轨SAR卫星同时作为发射机和接收机,不能充分发挥高轨SAR的这些优点。采用飞机或低轨卫星作为接收机平台不但能够更灵活地针对目标区域成像,而且分辨率也将大大提高。但是星机双基SAR(BiSAR)的几何构型复杂,难以直观地获知任意几何构型BiSAR的分辨率特性。该文从BiSAR基平面分辨率出发,根据几何构型得到基平面分辨率与地平面分辨率之间的几何关系,解析地表示出了BiSAR在地平面上的分辨率形状。据此可以评估BiSAR系统的分辨力,并且能够通过优化设计系统带宽和合成孔径时间两个参数使得BiSAR系统能够实现更好的分辨率特性。最后,仿真结果验证了方法的有效性。
高轨星机BiSAR;信号带宽;合成孔径时间;分辨率椭圆
1 引言
高轨SAR轨道高,重访周期短,在自然灾害观测,地质测绘,以及海洋目标监测等方面具有很大的应用潜力,但是高轨SAR分辨率远低于机载或者低轨星载SAR所能达到的分辨率,而且对于雷达前视和后视方向上存在不能成像的区域,因此如果单一采用高轨SAR同时作为发射机和接收机,不能充分发挥高轨SAR照射时间长、范围大、重返时间短的优点。采用飞机或低轨卫星作为接收机平台不但能够更灵活地针对目标区域成像,而且分辨率也将大大提高。另外,高轨星机双基SAR(BiSAR)的斜距历程基本上只有高轨单基SAR的一半,因此达到同样的信噪比需要的发射功率将大大减少[4],同时目标也会具有更好散射特性[5,6]。
当使用星机BiSAR进行对地观测时,系统的复杂度增加。BiSAR由于发射机和接收机具有相对独立的运动状态,几何构型较为复杂[7],因此难以直观地获知任意BiSAR构型能够达到的分辨率。文献[8]中使用广义模糊函数得到了BiSAR的点散布函数,近似得到了任意BiSAR构型的空间距离分辨率和多普勒分辨率,并且类似于单基SAR的斜距平面,定义了空间距离分辨率和多普勒分辨率方向所确定的平面为基平面,同时推导了任意方向的分辨率计算表达式,但是计算方法只适用于基平面上任意方向分辨率的计算。文献[9]中同样使用模糊函数来计算BiSAR的点散布函数,考虑了雷达轨迹的弯曲特性,对雷达斜距保留了泰勒展开式的二阶项,最后给出了积分形式的距离和多普勒分辨率表达式,更精确地表达了曲线轨迹的BiSAR的分辨率形状,但是不能够解析地给出任意方向分辨率的表达式,也不能据此设计雷达成像参数。文献[10]中使用了基平面上距离分辨率和多普勒分辨率大小和夹角以及信噪比的表达式,使用遗传算法来求解由目标分辨率和信噪比作为约束而构成的非线性方程组,进而设计了机载接收机的飞行任务,能够指导飞机选择合适的飞行路径以达到目标分辨率和信噪比。文献[11]中使用梯度法得到了BiSAR的空间距离分辨率与多普勒分辨率,与文献[8]从模糊函数推导得到的结果一致,同时将分辨率投影到地球的表平面上,但是使用的投影关系只适合雷达工作在简单的正侧视的情况。
本文从BiSAR的基平面出发,根据基平面上BiSAR的距离分辨率和多普勒分辨率大小及方向,构造出点散布函数3 dB等高线的椭圆表达式,然后根据分辨率形状在基平面和地平面之间投影关系,得到了地平面上的分辨率椭圆的表达式,同时给出了地表分辨率椭圆的长轴和短轴的大小,其中长轴则表征了BiSAR在地表所能达到的真实分辨率的大小。而根据实际应用对SAR系统的真实分辨率的要求,可以反过来得到基平面上距离分辨率和多普勒分辨率的大小,进而可以得到理想分辨率对雷达信号带宽和合成孔径时间的要求。
2 BiSAR分辨率分析及成像参数设计方法
高轨星机BiSAR的一般几何构型如图1(a)所示,点P表示场景目标位置,T和R分别表示发射机和接收机在合成孔径中心时刻所在的位置。当使用高轨SAR作为单一的发射机,采用机载接收机接收回波信号时,达到米级的分辨率,只需数秒的合成孔径时间。在成像时间段内,高轨SAR相对地表速度变化很小,轨道的弯曲也可以忽略不计。可以等效为匀速直线运动,事实上高轨卫星在合成孔径时间内相对目标的转角很小,与目标的相对运动对成像效果的影响很小,系统的成像能力主要是由几何构型及接收机的速度决定的。
2.1 地表分辨率表示
BiSAR的一般几何构型如图1(b)所示,BiSAR系统的空间距离分辨率沿发射机和接收机的斜距方向的角平分线方向,用表示沿该方向的单位向量,大小由系统带宽和双基角决定,空间多普勒分辨率由发射机和接收机的合成等效速度矢量决定,该角平分线方向单位向量和等效速度矢量共同组成了基平面,BiSAR的基平面类似于单基SAR的斜距平面,当发射机和接收机沿直线轨迹运动时,SAR在垂直于基平面的方向上没有分辨能力,SAR的3维分辨率是垂直于基平面的圆柱体,任意平面的分辨率椭圆都对应于该平面对圆柱体的截面。同时BiSAR在基平面上的分辨率椭圆各向分辨率最小,即基平面上具有最高的分辨率。
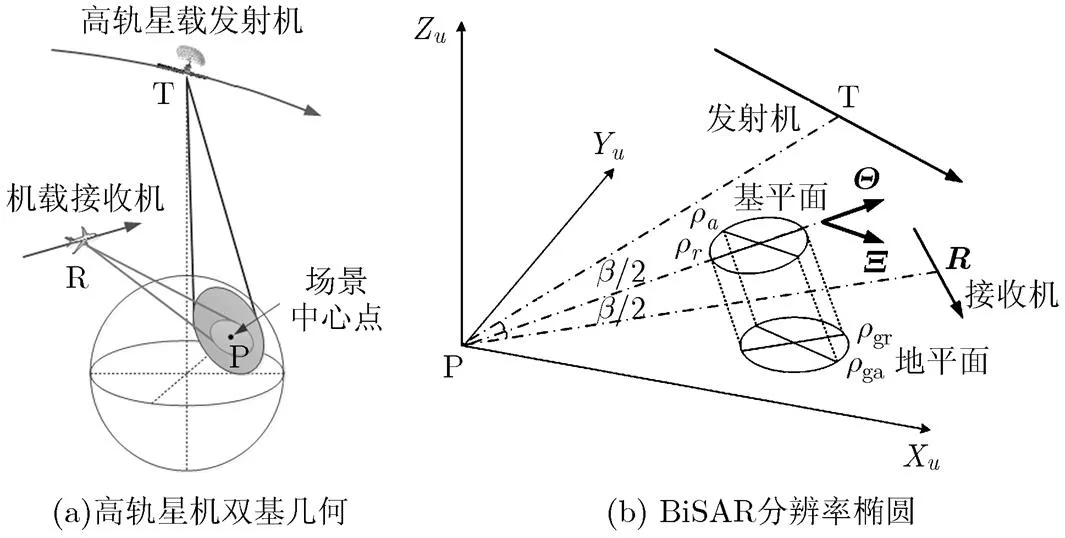
图1 星机双基几何与分辨率椭圆
BiSAR的基平面与单基SAR的斜距平面不同的是,距离分辨率与多普勒分辨率不一定垂直,如图2(a)所示,和的方向分别代表了基平面上距离分辨率和多普勒分辨率的方向,然而BiSAR在基平面上的最优与最差分辨率的方向不一定在这两个方向上,地面上的分辨率也是如此,而得到地平面上分辨率长轴与短轴分辨率与的大小才是最有意义的。
图2(b)表示基平面与地表平面及4个辅助坐标系。在BiSAR成像的基平面建立坐标系,其中与基平面和地平面的交线同方向,在基平面内并与轴正交,在基平面再建立一个辅助的坐标系,与PT和PR的角平分线向量平行且方向相反,轴在基平面内并与轴正交。在地表平面建立坐标系,其中与重合,与地表垂直,由右手法则确定。另外在目标点沿经纬度方向建立坐标系,称为地表经纬度坐标系,沿纬度方向,沿经度方向,垂直于地表。后面的计算都可以统一在地表经纬度坐标系下进行。
当BiSAR距离信号包络和方位天线方向图都近似成矩形窗函数时,SAR系统的空间距离分辨率和多普勒分辨率[3]可以分别表示为
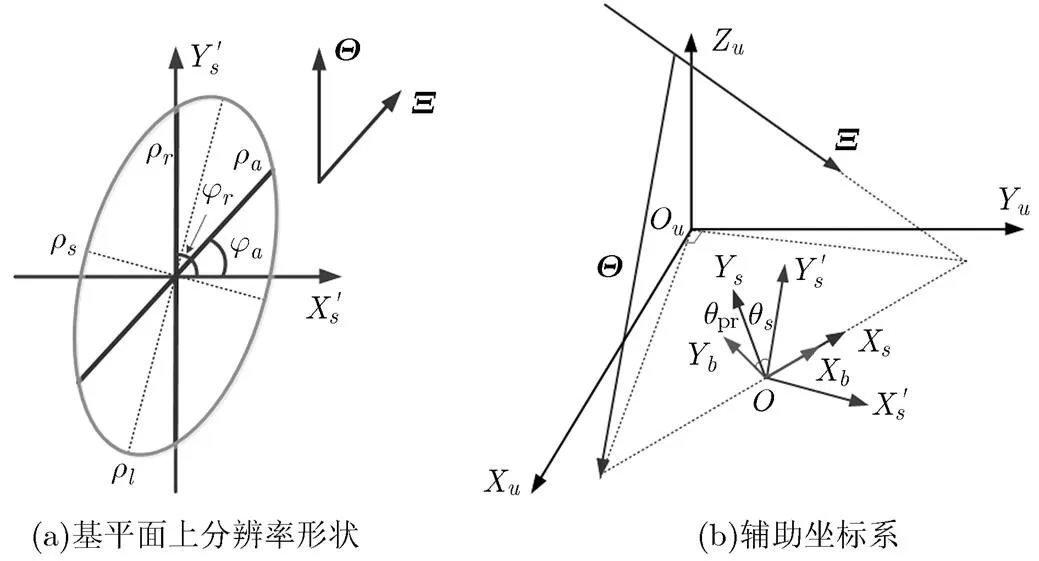
图2 分辨率椭圆与辅助坐标系

(2)
(4)
(6)

(8)
其中,
(10)
地表分辨率椭圆可以展开表示为

其中,
(12)
根据地表分辨率椭圆的表达式(9),同样可以得到点目标成像副瓣的方向:

而副瓣大小可以表示为
(14)
另外,将分辨率椭圆的表达式(11)改写成极坐标形式,对椭圆任意方向的半径长度关于方向角求导,求解导数等于0时的方向角,即可得到地表分辨率椭圆长轴和短轴的方向,也就是地表最差分辨率和最优分辨率的方向。
2.2 带宽与合成孔径时间设计
根据式(11)中地表分辨率椭圆的表达式,可以得到椭圆的长短轴的大小
(17)
(18)
其中,
(20)
式(20)表征了当前的BiSAR几何构型。根据式(19)可以根据当前的BiSAR几何构型以及对分辨率的要求,优化设计带宽和合成孔径时间这两个成像参数。
3 带宽和合成孔径时间优化仿真与误差分析
根据第2节的结果可以分析任意的双基几何构型的分辨率实现能力,并且能够设计合适的系统带宽和合成孔径时间,在满足分辨率需求同时能够达到最优的分辨率长短轴配比。
下面使用表1中的参数进行仿真分析。选择的高轨轨道是离心率为0,倾斜角较小的小“8”字轨道,对中国大陆具有较好的覆盖特性,高轨SAR发射机的初始信号带宽是70 MHz。另外接收机的速度和位置向量都是在以观测场景中心点为原点,以地球经纬度方向分别为轴,轴,垂直于地表方向为轴建立的地球表面经纬度坐标系中表示的。
设高轨卫星与机载接收机构成的BiSAR几何构型如图3所示,“8”字黑线表示高轨卫星的星下点轨迹,方框内表示观测场景与接收机的位置。此时观测场景处在高轨卫星后视的方向上,如果采用高轨SAR同时作为发射机与接收机,是难以实现2维成像的,但是如果采用机载接收机,仍能够实现高分辨率成像。情况1和情况2是接收机在不同位置沿不同方向飞行的两种情况,用来对比不同的双基几何构型下,地表分辨率的实现情况。
图4给出了使用表1中情况1的参数的仿真结果,图中每1行分别表示基平面、地平面及使用设计成像参数后的地平面上分辨率分析结果。第1列给出的是使用分辨率椭圆的解析表达式画出的分辨率形状,第2列相应地给出了BP成像结果的等高线图,并用相同的颜色画出了点目标成像结果的-3 dB等高线,它与分辨率椭圆是对应的,第3列给出了使用分辨率椭圆表示-3 dB等高线带来的误差。
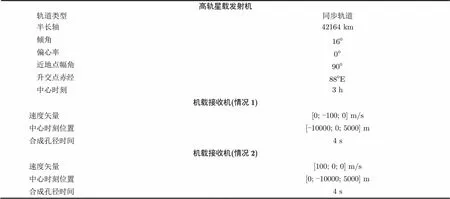
表1 BiSAR参数
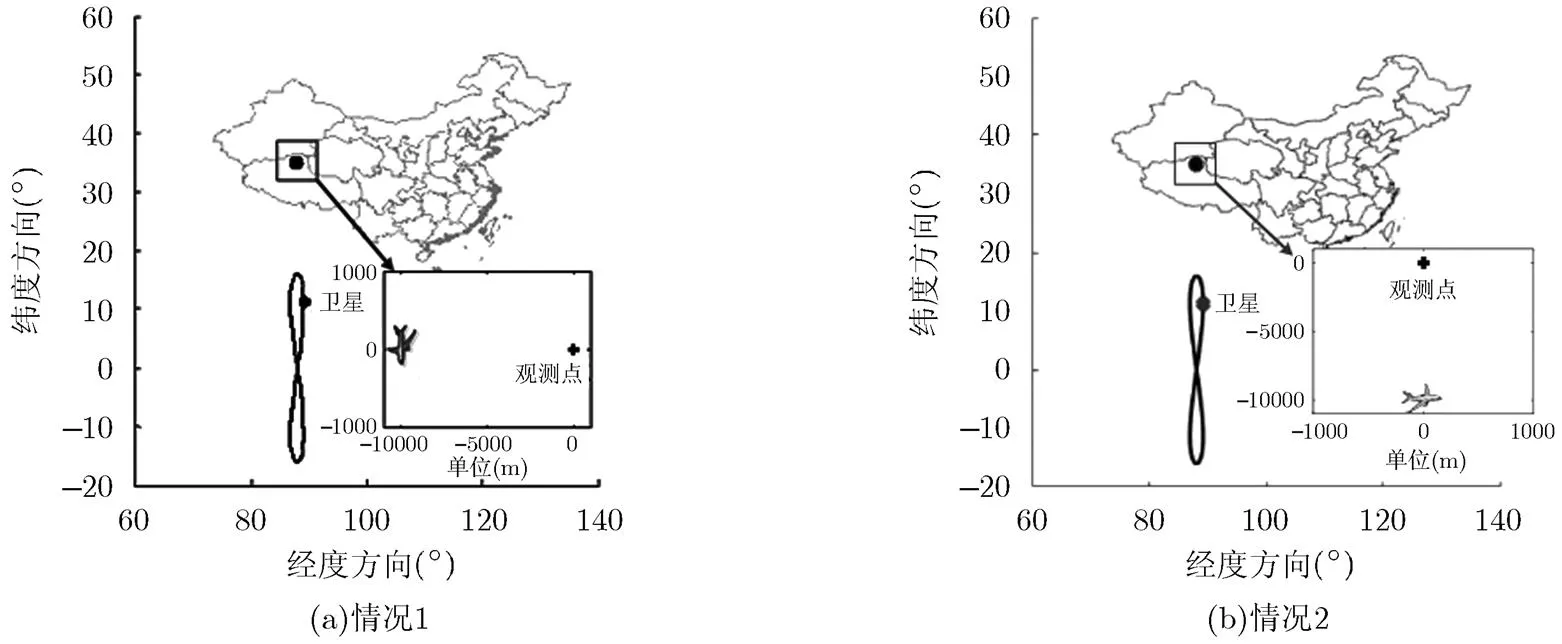
图3 观测几何
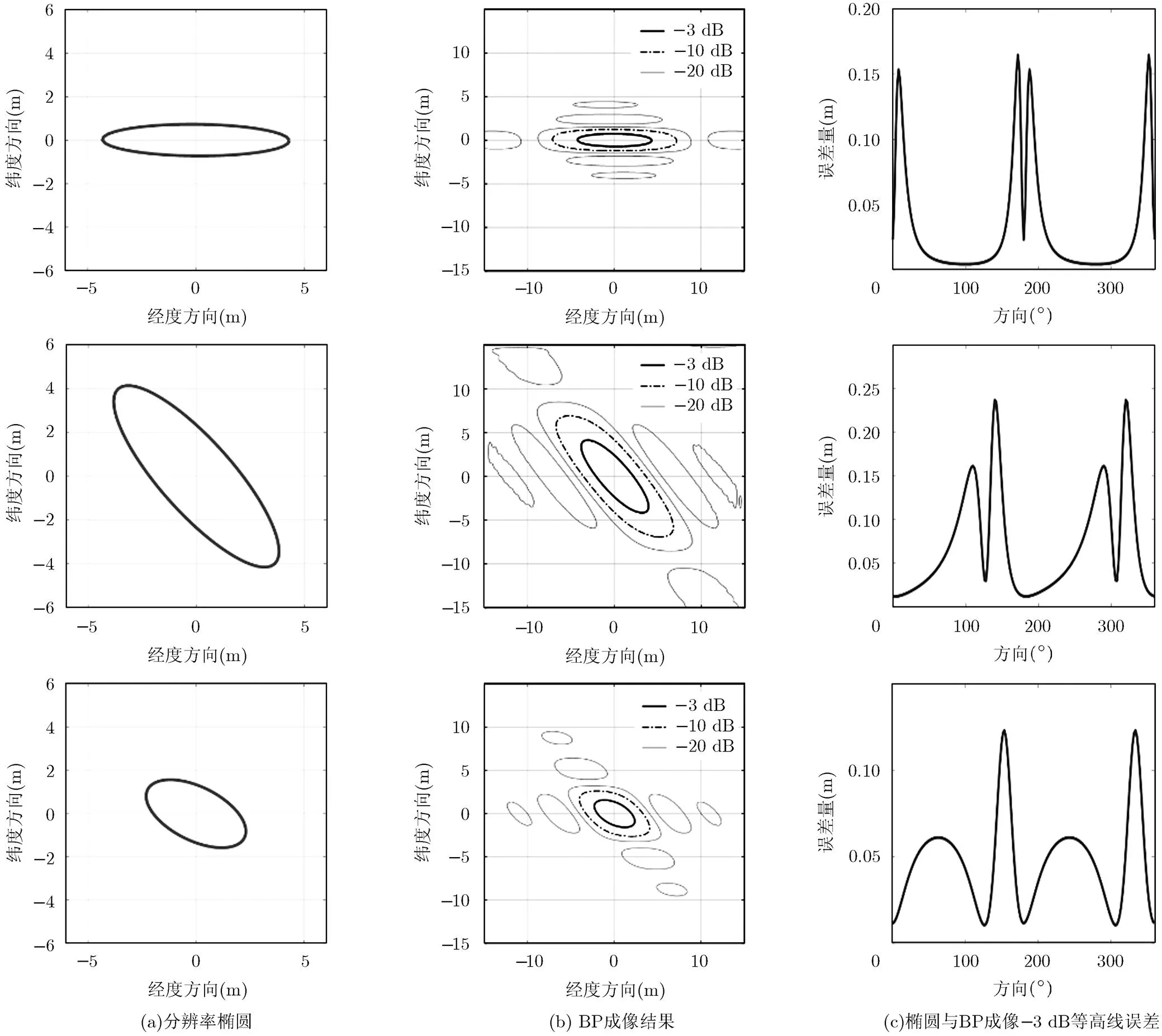
图4 情况1分辨率分析
使用本文方法设计出的最优的成像带宽和合成孔径时间分别为109.3 MHz和10.6 s。从第3行可以看出使用设计后的参数,成像结果的-3 dB等高线仍然不是圆,能达到的最大的分辨率短长轴之比只有0.497,说明对于有些几何构型,即使成像参数经过优化设计后,仍然不能够实现分辨率的大小在各个方向上接近。另外表2中给出了成像参数优化后点目标成像的副瓣以及分辨率椭圆的长轴与短轴的大小和方向(范围为[-90°, 90°])。情况一中点目标成像的副瓣方向分别是-52.8°和0°方向,而分辨率椭圆的长短轴分别是在-26.4°和63.6°方向上,而且此时地表分辨率椭圆长轴为5.00 m,短轴为2.48 m,但是距离分辨率和多普勒分辨率均为3.95 m,因此距离分辨率和多普勒分辨率不能用来代表地表真实的分辨率大小,只有获得地表分辨率椭圆长轴短轴方向上的分辨率大小才是有意义的。
表2 分辨率评估结果

距离向副瓣方位向副瓣长轴短轴 情况1方向0-52.8-26.463.6 大小(m)3.953.955.002.48 情况2方向89.91.245.5-44.5 大小(m)4.944.945.004.89
图5给出了使用表1中情况2的参数的仿真结果,设计出的最优的成像带宽和合成孔径时间分别为48.7 MHz和6.7 s。能达到的最大的分辨率椭圆短长轴之比为0.978,此时使用设计的成像参数,能够使分辨率形状非常接近圆,这是因为此时的星机双基构型等效速度与PT和PR的角平分线方向几乎垂直,所以基平面上的副瓣方向是垂直的,另外接收机雷达工作在正侧视状态,且速度方向与地面平行,因此分辨率投影到地面后只是距离向分辨率变差,副瓣方向仍是正交的,此时的BiSAR系统分辨率接近最优的状态,达到目标分辨率需要的带宽接近最小,合成孔径时间接近最短。对比情况1与情况2,可以看出接收机的运动对于高轨星机的分辨率影响很大,因此为了达到良好的分辨率,既要选取合适的成像参数,也要考虑接收机的飞行路径和速度。
另外,从图4和图5的最后一列可以看出,对于10 m的分辨率,分辨率椭圆表示-3 dB等高线的误差最大值都不会超过0.25 m,能够满足实际应用的要求。
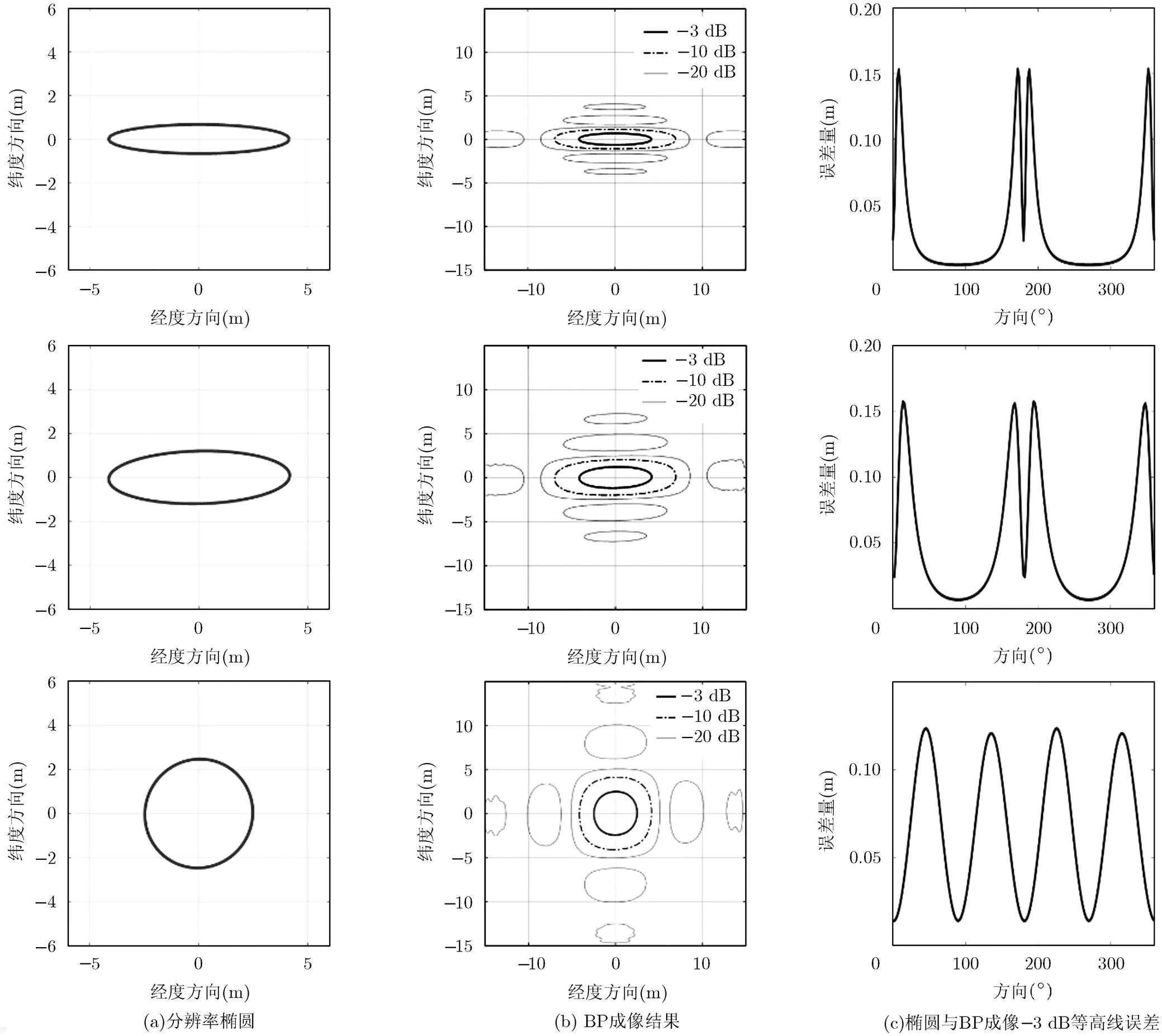
图5 情况2分辨率分析
表2中给出了两种不同的高轨星机几何构型下,最终设计得到的点散布函数的指标,包括地表分辨率的长短轴的方向和大小,距离分辨率和多普勒分辨率的方向和大小。
4 结论
本文使用分辨率椭圆来解析地表示BiSAR的分辨率。分析了高轨星机BiSAR复杂几何构型下的成像能力。并且经过对地表分辨率椭圆的分析,能够通过调整信号带宽和合成孔径时间两个参数来实现对地表分辨率的调整,使得地表任意方向分辨率的差异最小。这对于高轨BiSAR的带宽选择,凝视模式下合成孔径时间的调整,或者条带模式下的接收机波束宽度的选择,都有重要意义。另外BiSAR的几何构型对系统所能实现的分辨率影响很大,因此结合机载接收机的飞行任务设计与本文的成像参数设计方法,才能够充分发挥高轨星机BiSAR的成像能力。本文的分辨率分析方法同样适用于其他类型BiSAR的分辨率分析。
参考文献
[1] HU Bin, JIANG Yicheng, ZHANG Shunsheng,Focusing of geosynchronous SAR with nonlinear chirp scaling algorithm[J]., 2015, 51(15): 1195-1197. doi: 10.1049/el.2015.0580.
[2] WU Xiaoli, WANG Wei, CHEN Qi,The burst mode of geosynchronous synthetic aperture radar[C]. IEEE Asia- Pacific Conference on Synthetic Aperture Radar (APSAR), Singapore, 2015: 200-203. doi: 10.1109/APSAR.2015. 7306188.
[3] ZHANG Xin, HUANG Puming, and WANG Weiwei. Equivalent slant range model for geosynchronous SAR[J]., 2015, 51(10): 783-785. doi: 10.1049/el. 2014.3593.
[4] WU Junjie, SUN Zhichao, HUANG Yulin,Geosynchronous spaceborne-airborne bistatic SAR: Potentials and prospects[C]. IEEE Radar Conference (RadarCon), Arlington, VA, USA, 2015: 1172-1176. doi: 10.1109/ RADAR.2015.7131171.
[5] ZENG Tao, AO Dongyang, HU Cheng,Multiangle BSAR imaging based on BeiDou-2 navigation satellite system: Experiments and preliminary results[J]., 2015, 53(10): 5760-5773. doi: 10.1109/TGRS.2015.2430312.
[6] QIU Xiaolan, HAN Bin, MENG Dadi,An azimuth resample method for bistatic SAR motion compensation[C]. European Conference on Synthetic Aperture Radar (EUSAR), Aachen, Germany, 2010: 1-4.
[7] ZENG Dazhi, ZENG Tao, HU Cheng,Back-projection algorithm characteristic analysis in forward-looking bistatic SAR[C]. CIE International Conference on Radar, Shanghai,China, 2006: 1-4. doi: 10.1109/ICR.2006.343181.
[8] ZENG Tao, CHERNIAKOV M, and LONG Teng, Generalized approach to resolution analysis in BSAR[J]., 2005, 41(2): 461-474. doi: 10.1109/TAES.2005.1468741.
[9] LIU F, ANTONIOU M, ZENG Z,. Point spread function analysis for BSAR with GNSS transmitters and long dwell times theory and experimental confirmation[J]., 2013, 10(4): 781-785. doi: 10.1109/LGRS.2012.2223655.
[10] SUN Zhichao, WU Junjie, HUANG Yulin,Inclined geosynchronous spaceborne-airborne bistatic SAR: Performance analysis and mission design[C]. IEEE Radar Conference (RadarCon), Arlington, VA, USA, 2015: 1177-1181. doi: 10.1109/RADAR.2015.7131172.
[11] WANG Jingen, WANG Yanfei, ZHANG Jianming,Resolution calculation and analysis in bistatic SAR with geostationary illuminator[J]., 2013, 10(1): 194-198. doi: 10.1109/LGRS. 2012.2197850.
[12] LI Zengliang, ZHAO Xin, and DING Zegang. Analysis of diving squint SAR resolution[C]. Proceedings of 2011 IEEE CIE International Conference on Radar, 2011, 1: 875-878. doi: 10.1109/CIE-Radar.2011.6159680.
[13] 龙杰, 姚迪, 孙英钦, 等. 基于分辨椭圆的前斜SAR分辨率分析方法[J]. 电子学报, 2013, 41(12): 2493-2495. doi: 10.3969/ j.issn.0372-2112.2013.12.027.
LONG Jie, YAO Di, SUN Yingqin,. The method of resolution analysis based on distinguishable ellipse in squinted SAR[J]., 2013, 41(12): 2493-2495. doi: 10.3969/j.issn.0372-2112.2013.12.027.
[14] CHEN Jianlai, SUN Guangcai, YANG Jun,. Systematic analyses of challenges and solutions in geosynchronous synthetic aperture radar[C]. Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Singapore, 2015: 78-79. doi: 10.1109/APSAR.2015.7306158.
[15] ZHANG Qingjun, YIN Wei, and DING Zegang. An optimal resolution steering method for geosynchronous orbit SAR[J]., 2014, 11(10): 1732-1736. doi: 10.1109/LGRS.2014.2307167.
刘文康: 男,1994年生,博士,研究方向为合成孔径雷达成像.
孙光才: 男,1984年生,副教授,研究方向为新体制雷达成像、运动目标检测成像.
陈溅来: 男,1990年生,博士,研究方向为合成孔径雷达成像.
邢孟道: 男,1975年生,教授,研究方向为雷达探测、雷达成像、运动目标检测成像.
Method for GEO Spaceborne-airborne BiSAR Resolution Analysis and Imaging Parameters Optimal Design
LIU Wenkang SUN Guangcai CHEN Jianlai XING Mengdao
(,,,710071,) (,,,710071,)
The GEO SAR has its own features such as wide coverage and short revisit time. However, when the GEO SAR is both used as a transmitter and a receiver, its advantages is not well exploited. If an airplane or a LEO satellite is adopted as a platform of the receiver, not only the interesting regions can be observed flexibly, but also finer resolution can be achieved. However, the geometry of the BiSAR is complicated, so it is not easy to acquire how much resolution an arbitrary BiSAR system can reach. Thus starting with the resolution on the basic plane of a BiSAR system, and combined with the resolution’s projection relation between the basic plane and the plane tangent to the earth’s surface, the resolution shape’s expression on the ground can be got finally. Based on the expression, the resolution of a BiSAR system can be assessed, and finer resolution can be realized through optimizing two parameters, including signal bandwidth and synthetic aperture time. Finally, the simulation results validate the effectiveness of the proposed method.
GEO spaceborne-airborne BiSAR; Signal bandwidth; Synthetic aperture time; Resolution ellipse
TN957.52
A
1009-5896(2016)12-3152-07
10.11999/JEIT160656
2016-06-21;改回日期:2016-11-14;
2016-12-13
孙光才 gcsun@xidian.edu.cn
国家自然科学基金(61301292),空间测控通信创新探索基金(201509A)
The National Natural Science Foundation of China (61301292), AeroSpace T.T.& C. Innovation Program (201509A)