双刀交替式连续剁馅机的设计
2016-12-05王成军吴娅楠程浩杰
郑 艳 王成军 吴娅楠 程浩杰
(1.安徽理工大学机械工程学院,安徽 淮南 232001;2. 合肥学院机械工程系,安徽 合肥 230601)
双刀交替式连续剁馅机的设计
郑 艳1王成军1吴娅楠2程浩杰1
(1.安徽理工大学机械工程学院,安徽 淮南 232001;2. 合肥学院机械工程系,安徽 合肥 230601)
针对现有剁馅机技术的不足,设计一种可实现两片剁刀交替进行连续往复剁切作业的双刀交替式连续剁馅机。通过改进传统剁馅机的执行机构和传动系统,将二级锥齿轮减速器、蜗轮蜗杆减速器、带传动机构,以及作为执行机构的双曲柄滑块机构进行合理布置,以满足作业要求;并运用ADAMS软件对执行机构进行运动学分析。分析结果表明,执行机构的设计可靠且合理,所设计的新型剁馅机可大幅提高剁馅效率和制馅质量,有效避免各种营养成分的流失和馅沫飞溅现象的发生。
剁馅机;剁刀;交替式;双曲柄滑块机构
传统绞肉机在制馅时,由于受到挤压,破坏了肉质的结构,使肉富含的营养成分流失而失去原有的鲜味,影响了口感[1],且很多时候剁馅作业对象比较单一[2-4]。自动剁馅机的出现解决了馅的质量不可控和口感问题[5],但双刀式剁馅机(见图1)大多采用平刃剁刀和简易的平面砧盘,且双剁刀多采用同步剁切方式,作业时拌料不足,易产生飞溅,有的需专门人员协助才能完成整个剁馅工作,效率低[6]。市售的另一类制馅机,如多功能自动菜馅机(见图2)采用相对旋转刀组对制馅原料进行高速旋切成馅,但切料不均匀,覆盖件内飞溅严重,清洗不便。
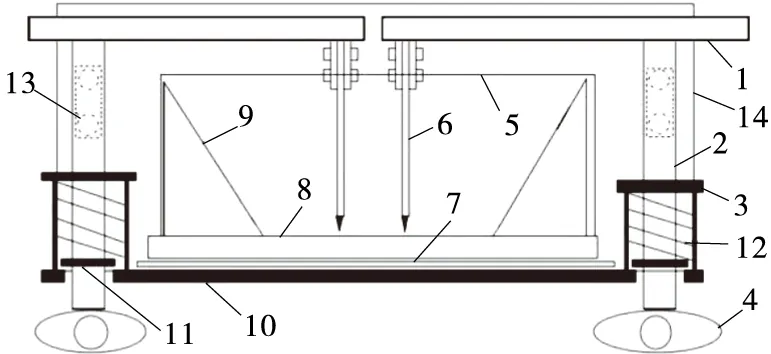
1. 刀架板 2. 立柱 3. 弹簧护套 4. 凸轮 5. 围板 6. 刀具 7. 拖板 8. 剁板 9. 防溅坡 10. 平台 11. 弹簧压板 12. 弹簧 13. 滑槽 14. 背板
图1 双刀式剁馅机的结构示意图
Figure 1 The structure of the double type chop stuffing machine schematic diagram
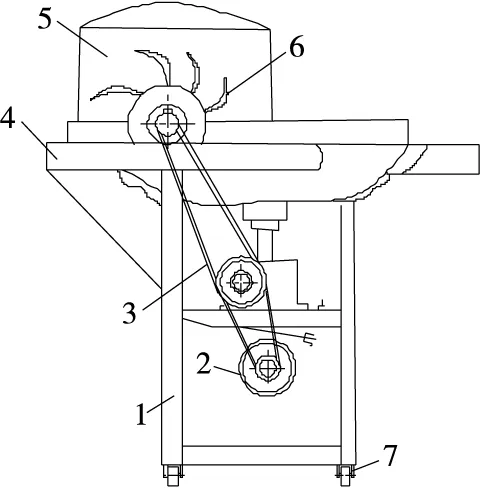
1. 支架 2. 皮带轮 3. 皮带 4. 旋转转盘 5. 安全盖 6. 旋转刀组 7. 滚轮
图2 多功能自动菜馅机的结构示意图
Figure 2 The structure diagram of multifunctional automatic turnip machine
为此,针对现有技术的不足,设计一种双刀交替式连续剁馅机,将二级锥齿轮减速器、蜗轮蜗杆减速器、带轮,以及作为执行机构的双曲柄滑块机构进行优化布置,解决剁馅机剁馅质量差、对象单一、工作效率低和清理不便等问题。同时,运用ADAMS软件对双刀连续剁馅机的执行机构进行模拟仿真,以确保机构设计的合理性[7]。
1 双刀连续剁馅机的设计
1.1 总体结构设计
双刀交替式连续剁馅机结构见图3。由电机和二级锥齿轮减速器构成的动力系统通过主传动装置与执行机构相连接,为执行机构中剁刀的往复运动提供动力;动力系统通过砧盘传动装置与砧盘装置相连接,为砧盘的旋转提供动力;主传动装置与砧盘传动装置均采用带传动机构。上述七部分相互协调配合实现左右剁刀交替进行连续往复剁切和砧盘的旋转拌馅[7],代替手工操作自动完成剁馅和翻馅作业。双刀连续剁馅机的主要技术参数见表1。
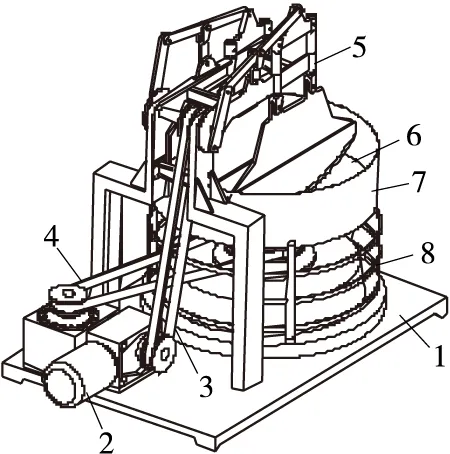
1. 底座 2. 动力系统 3. 主传动装置 4. 砧盘传动装置 5. 执行机构 6. 砧盘装置 7. 砧盘防护筒 8. 安全防护罩
图3 双刀连续剁馅机的结构
Figure 3 Structure of double continuous chop stuffing machine

表1 剁馅机的主要技术参数
1.2 工作原理
双刀连续剁馅机的电机动力由二级锥齿轮减速器第一次减速后经过主传动装置和砧盘传动装置分别传递给执行机构的曲柄轮和砧盘装置。执行机构由相位角相差180°的两组曲柄滑块机构组成,执行机构将电机的单向旋转运动转换为垂直方向的两路直线往复运动,进而驱动两把剁刀对砧盘上的馅料进行交替往复剁切。同时,二级锥齿轮减速器的另一个输出端的动力经过涡轮蜗杆减速器二次减速后,由砧盘传动装置传递给砧盘装置,驱动砧盘及馅料旋转,馅料在砧盘转动及交替运动的剁刀短时歇阻挡作用下,实现被动搅拌和翻转。由于所设计的砧盘采用凹面结构,且与剁刀的刀刃轮廓完全吻合,馅料在剁切作业过程中自然向砧盘中心移动。此外,在砧盘外设置的砧盘防护筒还可以对飞溅的馅料进行有效遮挡,防止馅料四处飞溅。
1.3 执行机构设计
双刀剁馅机执行机构见图4。执行机构左右两部分结构完全相同,动力系统通过带传动机构将动力传递给驱动轴,驱动轴通过驱动左连杆机构和右连杆机构带动左剁刀和右剁刀进行往复运动。同时,左连杆机构和右连杆机构的运动方向相反,相位相差180°,即执行机构的本质是相位差为180°的双曲柄滑块机构。
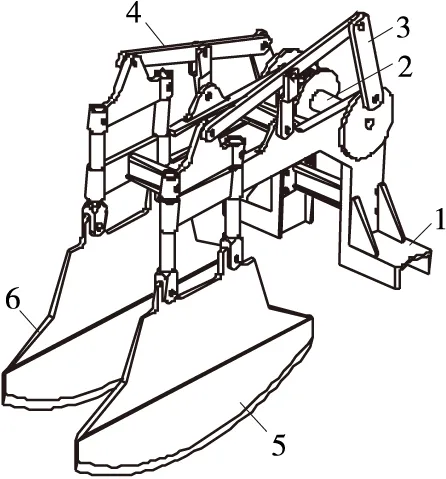
1. 执行支架 2. 驱动轴 3. 左连杆机构 4. 右连杆机构 5. 左剁刀 6. 右剁刀
图4 执行机构的组成
Figure 4 The composition of actuator
2 主要技术参数的确定
2.1 执行机构自由度的计算
由于执行机构左右两部分结构完全相同,因此,左连杆机构或右连杆机构的运动自由度即为执行机构的运动自由度,图5为执行机构的机构原理图。
根据式(1),可计算。

(1)
式中:
F——执行机构的自由度;
n——构件数;
pl——低副数;
ph——高副数。
本试验中n取5,pl取7,ph取0,代入式(1)求得:F=1。
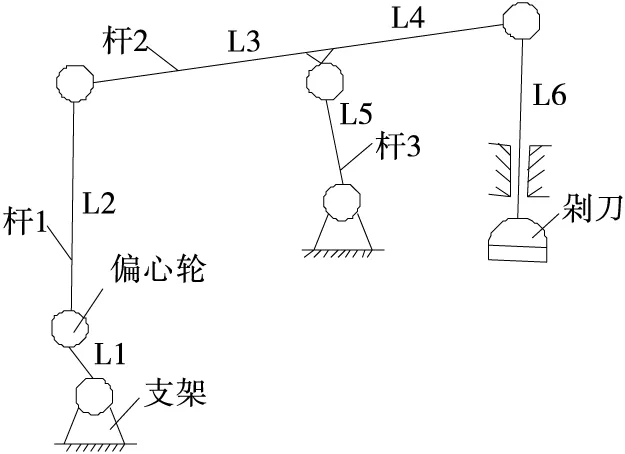
图5 执行机构原理图
同时,为保证执行机构设计的合理性,根据平面连杆的设计原理及条件,计算与确定了剁馅机虚拟样机执行机构的各杆参数,结果见表2。

表2 执行机构的各杆参数
2.2 执行机构ADAMS模型的建立及运动仿真
2.2.1 ADAMS运动模型的建立 根据执行机构的设计结果在Pro/E中建立实体模型,然后导入ADAMS,修改零件名称,添加约束和驱动[8-9]见表3,最终的模型见图6。
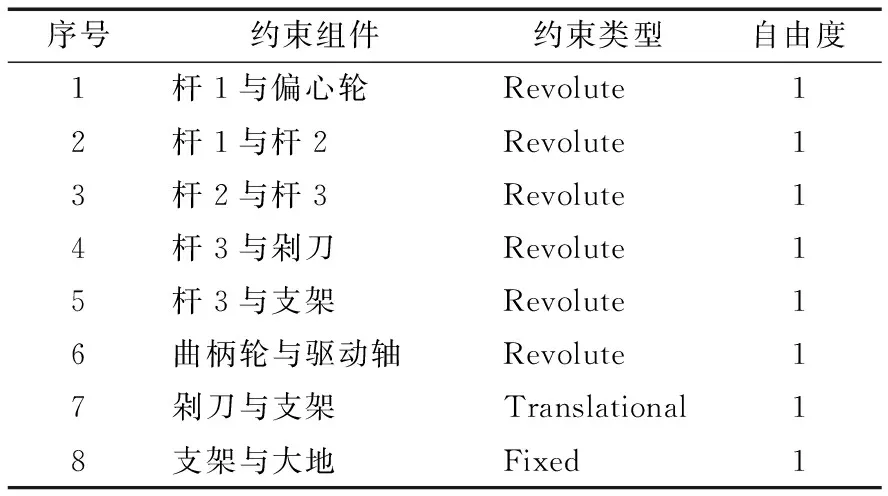
表3 执行机构的约束明细
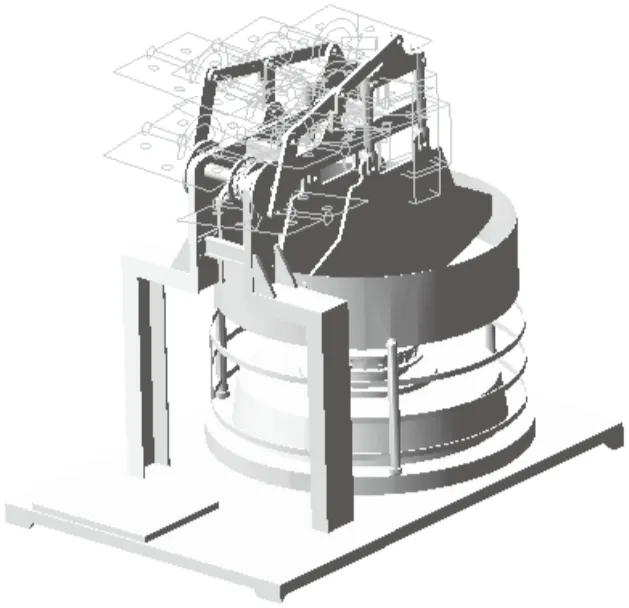
图6 执行机构ADAMS仿真模型
2.2.2 运动仿真及结果分析 由图7可知,左剁刀和右剁刀在X、Y方向的位移、速度和加速度均为0,在Z向的位移、速度和加速度曲线呈周期性变化,且振幅平稳,表明左剁刀和右剁刀在垂直方向上作直线往复运动;左剁刀的位移、速度、加速度曲线和右剁刀的位移、速度、加速度曲线的方向相反,左剁刀与右剁刀的运动相位相差1800。分析可知,执行机构的ADAMS模型是正确的,满足剁馅作业的要求。此外,根据模拟仿真试验,左右剁刀的频率可通过改变动力系统中电机的转速实现,其振幅的调节可通过改变执行机构中各杆参数来实现。
3 结论
(1) 通过对双刀连续剁馅机的工作原理以及结构的分析,确定了执行机构的自由度、执行机构中各杆参数以及剁馅机的主要技术参数,为双刀连续剁馅机的设计与制造提供了参考与依据。

图7 剁刀的运动曲线
(2) 建立了双刀连续剁馅机的虚拟样机,创建了执行机构ADAMS仿真模型,通过ADAMS运动学仿真实验验证了执行机构设计的正确性。
[1] 为什么刀剁肉比机绞肉好吃[J]. 食品与健康, 2012(4): 63-63.
[2] 陈志勇, 童宝宏, 张同雪, 等. 基于单片机AT89C51的多功能绞肉机开发与实现[J]. 包装与食品机械, 2014, 32(1): 38-41.
[3] 李兰忖. 多功能绞肉机智能控制系统[J]. 食品与机械, 2012, 28(4): 157-160.
[4] 童宝宏, 许正华, 宋斌, 等. 影响绞肉机工作品质的产品设计因素分析[J]. 食品与机械, 2012, 28(1): 112-114, 132.
[5] 长安. 帮你创业致富的自动剁馅机[J]. 中小企业科技, 2006(7): 18.
[6] 杨志成, 张景胜, 黄春娥, 等. 可梳理式多功能自动切菜机的研究与设计[J]. 食品与机械, 2014, 30(3): 103-105, 126.
[7] 郑艳, 陈孝喆, 程浩杰, 等. 一种双刀连续剁馅机: 中国, 201510734398.6[P]. 2015-10-29.
[8] 梁爽, 印雪梅, 王华. 基于ADAMS的静叶联调机构参数化设计[J]. 航空发动机, 2016, 42(1): 65-69.
[9] 牛婷, 李永堂, 刘志奇, 等. 花键冷敲机执行机构运动参数分析与运动学仿真[J]. 机械设计, 2014, 31(4): 41-45.
Design of dual cleaver alternating continuous mincing machine
ZHENGYan1WANGCheng-jun1WUYa-nan2CHENGHao-jie1
(1.CollegeofMechanicalEngineering,AnhuiUniversityofScienceandTechnology,Huainan,Anhui232001,China;2.DepartmentofMechanicalEngineering,HefeiUniversity,Hefei,Anhui230601,China)
To overcome the shortcomings of the existing mincing machine technology, a new type of mincing machine with dual cleaver chopping alternatively continuously was designed. The actuators and transmission system of the existing mincing machine were improved so that the reasonable layout of the two-stage cone gear reducer, worm gear reducer, belt transmission mechanism. Moreover, a double crank slider mechanism was made in order to meet the operation requirements. Furthermore, the software ADAMS was used to conduct a kinematic analysis of the actuator. The results showed that the actuator design was the reliable and reasonable. Our newly designed mincing machine turned out to boost chopping efficiency, filling-making quality and avoid the loss of various nutrients and the splash phenomenon effectively.
mincing machine; cleaver; alternate; double crank slider mechanism
安徽省2015年科研条件专项项目(编号:2060503)
郑艳(1992—),女,安徽理工大学在读硕士研究生。
E-mail:2546750266@qq.com
2016-02-25
10.13652/j.issn.1003-5788.2016.10.021
