一种雷达接收机幅度和相位一致性改进设计和检测的方法
2016-06-03袁有宏
张 华,袁有宏
(海军装备部,北京 100036)
一种雷达接收机幅度和相位一致性改进设计和检测的方法
张华,袁有宏
(海军装备部,北京100036)
摘要:在雷达设计初期,考虑接收机的幅度和相位一致性已成为设计师的首选。目前,在设计幅度和相位一致性的接收机系统的检测和测量方面还存在一定的技术缺陷,不仅需要三分贝桥等微波器件或设备和特殊的仪器仪表,设备数量多,而且工作量大,操作复杂,给检测工作带来诸多不便。本研究克服了接收机系统在检测方面的技术缺陷,在接收机系统技术领域涉及幅度和相位一致性的设计及检测的方法上进行了改进,以减少设备数量、减少工作量为目标,进而提高检测的可操作性。
关键词:雷达;接收机;幅度;相位
DOI 10.3969/j.issn.1672-6375.2016.05.009
0 引言
在某些雷达系统的方案论证阶段,一般对组成雷达的元器件数量、性能无法完全确定,不可能进行精确的估算,但是对整个雷达的性能参数,诸如作用距离、发射机功率、脉冲宽度、天线增益、接收机噪声系数、分辨力等指标基本已确定。这其中,接收机输出信号的幅度和相位一致性是我们不得不考虑的问题,而且考虑的越早越好,以避免日后一些不必要的麻烦。通过采用微波移相器或数字移相器来补偿相位误差,是一种折中方案,虽然并不能完全解决问题,但在设计之初就充分考虑,这样后期补偿也能做到有的放矢,能很方便地补偿过来。
某些需要关注幅度和相位一致性的设计和检测的接收机系统在测量上需要三分贝桥等微波器件或设备和特殊的仪器仪表,设备数量多、工作量大、操作复杂。因此,为了克服接收机系统在检测方面的技术缺陷,笔者尝试在接收机系统技术领域涉及幅度和相位一致性的设计及检测的方法上进行改进,以减少设备数量、减少工作量,进而提高检测的可操作性。本论述从技术角度探讨涉及幅度和相位一致性的接收机系统设计和检测方法。
1 技术方案
为了克服已有的技术缺陷,解决接收机幅度和相位一致性的设计和检测问题,提出如下技术方案(见图1所示),其基本实施过程如下:
将信号源输出信号通过三通一分为二输入到被测设备所需测试的两个通路中,被测设备的输出一一对应接入专用匹配负载盒的两个输入端,匹配负载盒的输出分别接至示波器的两个输入端口(见图2所示)。示波器是带有相位测量的示波器,从示波器上可以直接读出两个通路间的幅度差值和相位差值(见图3所示)。
本方法对比已有技术,能够迅速准确测量出每两个通路间的幅度和相位差值,具有简单、直观的效果。
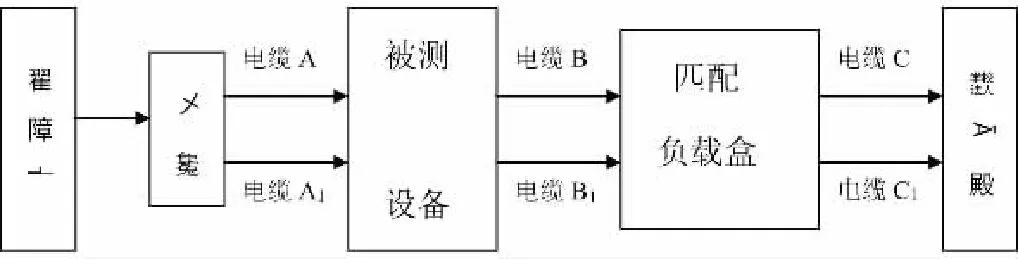
图1 测试连接图
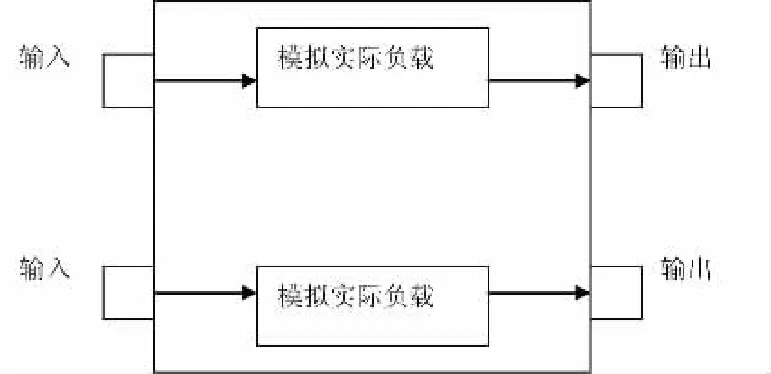
图2 匹配负载盒示意图
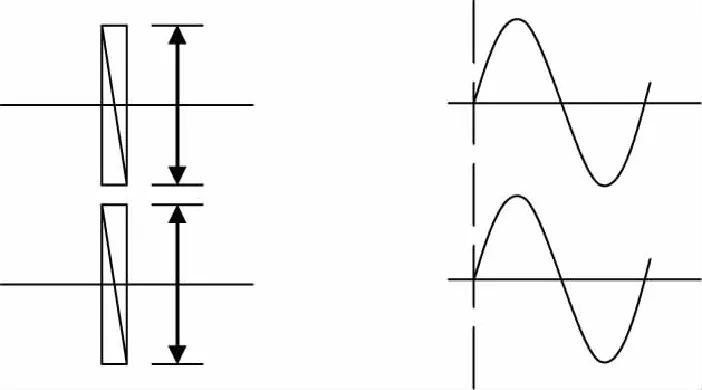
图3 示波器观测幅度和相位一致性波形
此处需要注意的是,微波组件三通(或魔T)在功率分配和隔离度等方面应用效果比较好。当使用SMA三通(如SMA-KJK)时,就必须要考虑匹配、驻波等的影响。SMA三通使用在频率较高的射频环境下,它本身带来的反射是很严重的。三通的反射会造成两路输出功率不一致,甚至造成相位的变化,从而带来不必要的影响。所以,本系统在射频部分使用了波导三通(当频率较低时,可以使用SMA三通,如几十兆赫兹),但为了做到更好的通道间隔离,在三通通过波同转换,再经过电缆连接到信号输入端时,又在信号输入端增加了隔离器,用以消除外界因素造成的幅度和相位变化。当然,可以在信号输入和输出端都放置隔离器,通过试验验证,本系统仅在信号输入端增加隔离器就足够了。
2 系统组成
整个系统要求模块化、小型化和高可靠性,主要包括:集成前端、主中放、控制电路。集成前端用于放大来自于天线系统的微弱信号,主要包括低噪放、PIN控制、混频器等;主中放主要用于放大来自于集成前端的中频信号,主要包括闭塞脉冲控制、选通控制、距离灵敏度控制、检波和视放、驱动和隔离等(见图5所示);控制电路主要用于产生自动增益控制电压、产生距离灵敏度控制曲线等,主要包括选通、门限、峰值检波、隔离放大、输出等。
说明:集成前端将来自于天线系统的微弱信号放大、混频处理后将中频信号送至主中放,接收系统信号走向见图4所示;
主中放将中频信号放大处理后送至处理机,将视频信号送至控制电路用来产生自动增益控制电压,见图7所示;
控制电路产生自动增益控制电压,分别送至主中放和集成前端。同时产生距离灵敏度控制曲线送至主中放,产生固定衰减指令送至处理机,具体见图8所示;
处理机将PIN控制脉冲和固定衰减指令送至集成前端,将闭塞脉冲和选通脉冲送至主中放,将距离灵敏度触发脉冲送至控制电路。同时处理主中放输出的包含有目标角误差信息和距离信息的中频信息。
设计中尽量采用集成电路,简化设计,少使用分立元件。从元器件本身考虑,尽量减少或避免使用影响相位的器件;从各分系统和总体考虑,注意各系统间的耦合、匹配;同时,还要考虑降额设计,容差设计、热设计、电磁兼容性设计等。

图4 接收系统信号走向框图

图5 主中放和控制电路组成

图6 集成前端原理框图
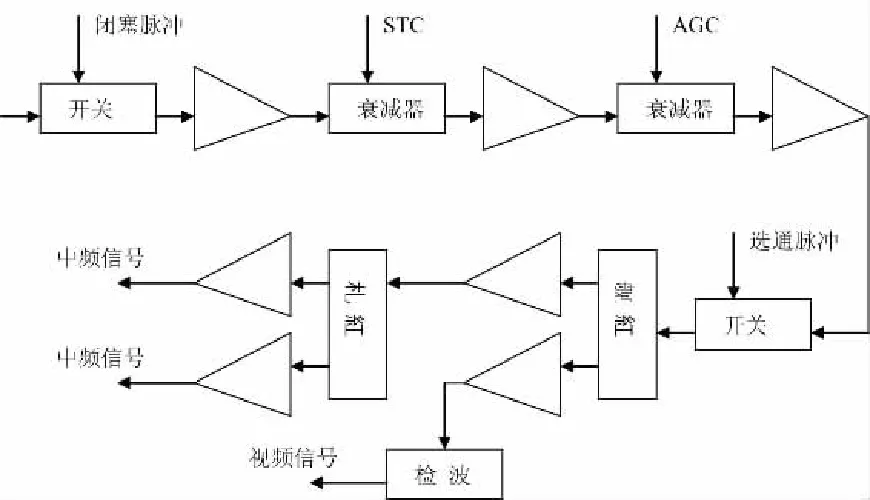
图7 主中放原理框图
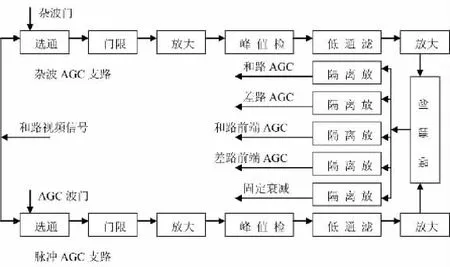
图8 控制电路自动增益控制(AGC)原理框图
考虑到通道间隔离度、通道间幅相一致性等问题,本系统组装在屏蔽盒中,每一支路用良导体物理隔离,每一支路印制板基本一致,必要时支路间相同器件可以配对使用。
本论述重点讨论影响接收机幅度和相位的因素和处理办法,以及接收机幅度和相位的测量办法,目的是减少或消除不利因素,提高实效,减少反复,每个分系统的具体设计不在本论述的讨论范围内,所以在此就不再赘述。
3 具体实施方式
下面结合附图对本方法的实施方式做详细说明。
其具体步骤包括:
步骤一,按本论述图1连接各设备。
步骤二,电缆A与电缆A1、电缆B与电缆B1、电缆C与电缆C1应该分别等长,而且对应接头应该用SMA等接插件可靠连接。
步骤三,匹配负载盒应该做成与实际负载相同的形式,这样可以减少测量误差。
步骤四,测量,对于多个通道而言,首先先选择一个基准通道,再拿其余通道和基准通道分别比较,测量出幅度差值和相位差值。比如和通道与俯仰通道的幅度差值和相位差值,和通道与方位通道的幅度差值和相位差值,此时和通道为基准通道。
步骤五,改变信号源频率,在整个信号带宽内,测量需要的幅度差值和相位差值。
自此,就完成了幅度和相位一致性的测量。
4 实施案例
步骤一,按图9连接各设备和仪表。
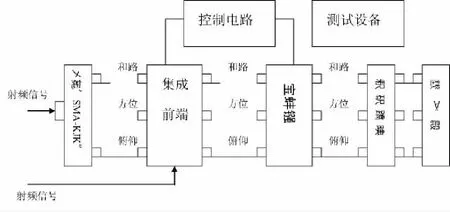
图9 被测设备连接示意图
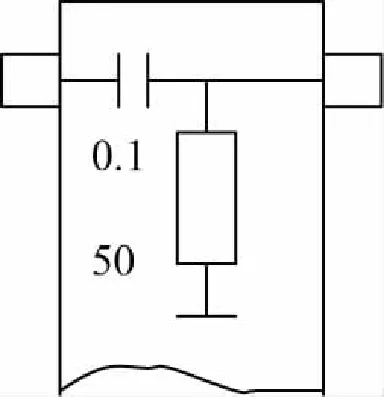
图10 实测例匹配负载示意图
步骤二,测量,记录。
步骤三,改变信号源频率,在整个信号带宽内,测量需要的幅度差值和相位差值,记录。
步骤四,改变信号源功率,在整个信号带宽内,测量需要的幅度差值和相位差值,记录。
步骤五,改变一个通道,重复步骤一,步骤二,步骤三。
步骤六,测量完成。记录见表1。

表1 测试记录
说明:此方法在整机或分系统实施检测,都比较方便。在整机上测试时,要求被测试设备(中频输出)留有专门测试接口,并要保证匹配负载与实际负载一致时,才能保证测试结果真实可靠,见图10所示。
电缆的长度对相位有直接影响,当然也可以通过改变测试电缆的长度来调整相位差值。此处电缆的长度对幅度的影响忽略不计。
通道间产生的幅度差,可以通过调整通道增益来弥补。通道间产生的相位差,可以通过调整微波移相器或数字移相器来补偿。
在一些条件限制的测试环境下,如果没有可以直接测量相位的示波器或其他专门测量相位的仪表。我们可以采用图6所示的方法加以测试。从图中可以知道周期(两个回波的周期是一致的),通过示波器也可读出两个回波的相对时延,这样就可以计算出相对相位的值。比如图11中:测得周期为200 ms,相对延时为10 ms。因为一个周期相位为3 600。由此就可以得出:当相对时延为10 ms时,相对相位值就为:3 600/200*10= 180。

图11 相位测量方法
作者简介:张华(1977-),男,汉族,山东莱芜人,大学本科,工程师,主要从事雷达工作。
收稿日期:2016- 3- 9
中图分类号:TN957
文献标识码:A
