月球天梯力学特性研究
2016-04-13李蒙陈伟跃杨胜高旭
李蒙,陈伟跃,杨胜,高旭
中国空间技术研究院 载人航天总体部,北京 100094
月球天梯力学特性研究
李蒙*,陈伟跃,杨胜,高旭
中国空间技术研究院 载人航天总体部,北京 100094
月球天梯的构型对其力学特性和质量特性起决定性作用,直接关系到天梯建造材料的选取。目前对月球天梯的研究集中在组合横截面积构型上,未对其他构型天梯的特性展开深入研究。针对这一问题,文章进行了不同构型月球天梯的力学特性研究。建立了月球天梯动力学模型,分别将天梯缆绳线密度和应力作为常值,推导了等横截面积和变横截面积两种新构型月球天梯的动力学方程和质量特性方程,进行了不同构型天梯关键特性参数的计算和对比分析。研究结果表明,变横截面积天梯可将最大应力设计为任意恒定值,降低了对材料极限应力的要求,其总质量小于等横截面积和组合横截面积天梯,为最优构型方案。
月球天梯;力学特性;质量特性;组合横截面积;等横截面积;变横截面积;拉格朗日点
天梯(Space Elevator)通常指从地球或其他星体表面向宇宙中延伸,可达到一定高度的高塔结构。由于随星体以一定角速度自转,天梯上不同高度处具有不同的线速度。利用这一特性可通过其向太空运输载荷,或发射进行星际探测任务的航天器。利用天梯运输仅需克服载荷自身的重力势能,与传统采用运载火箭运输的方式相比,能够大幅降低单次运输成本。
1895年俄罗斯物理学家Tsiolkovski提出了地球天梯概念[1],并计算了天梯上重力与离心力相等处(天梯平衡点)的高度,即地球静止轨道高度。苏联工程师Yuri Artsutanov于20世纪60年代完善了这一概念并给出了天梯的建造方案[2]。1975年,美国工程师Jerome Pearson系统性地给出了利用地球天梯运输载荷、发射航天器的方案,进行了天梯动力学分析[3]。随后,Pearson又将天梯理论推广至月球,将拉格朗日点作为天梯平衡点,提出了月球天梯的概念[4]。在NASA先进概念研究所(Institute of Advanced Concept,NIAC)的资助下,Brad Edwards对地球天梯展开了系统研究,详细阐述了设计、建造和运营天梯需要考虑的各种因素,提出了近期和远期的地球天梯建造和运营规划[5-9]。P.K.Aravind建立了地球天梯的力学模型,计算了无配重的等横截面积和变横截面积地球天梯高度,给出了地球天梯高度和配重质量的关系[10]。E.M.Levin建立了月球天梯的力学模型,提出了一种组合横截面积构型的天梯方案,进行了天梯关键参数计算[11]。Burov于2013年研究了月球天梯长度变化对缆绳运动产生的影响[12],2014年Burov等人又对月球天梯的钟摆运动进行了分析[13]。中国近年来广泛开展了利用运载火箭运送航天器进行月球探索的研究工作[14-15],但目前尚未发现关于月球天梯的公开文献。
不同构型月球天梯的力学特性和质量特性各不相同,选择建造材料时应充分考虑这些特性并进行权衡。月球天梯构型选取时可充分借鉴目前已有的地球天梯构型,但二者存在一定差异,地球天梯建模为二体问题,而月球天梯建模需考虑三体动力学。目前发表的文献中只涉及了组合横截面积构型的一种月球天梯方案。本文分别将天梯缆绳线密度和应力作为常值,推导了无配重等横截面积和有配重变横截面积两种月球天梯构型的动力学方程和质量特性方程,并与现有的组合横截面积构型月球天梯的关键参数进行了对比,给出了分析结论。为月球天梯构型方案提供了新的选择,对月球天梯的总体方案确定和建造材料的选取具有一定的参考价值。
1 月球天梯原理及系统组成
月球天梯系统组成如图1上半部分所示,其主要结构为经过拉格朗日点L1的缆绳,其一端向月球延伸,固定于月球赤道;另一端远离月球方向,终端与配重连接,以保持缆绳处于拉伸状态。缆绳上配置若干依靠太阳能驱动的爬升器往返于月面与缆绳终端。由于月球天梯系统随月球一起绕地球公转,缆绳上任意一点均具备一定的轨道能量,通过爬升器可将月球上的资源运送至月球天梯上一定高度处,释放后进入地球轨道,最终经过数次变轨到达地球。也可将宇航员和其他载荷由地球轨道经过天梯转移至月球,进行月球基地建造。
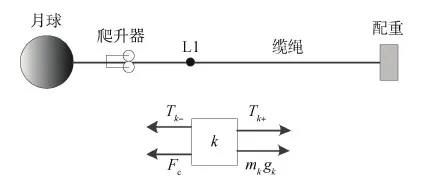
图1 月球天梯示意Fig.1 System configuration of lunar space elevator
由于受到地球引力、月球引力及公转产生的离心力,月球天梯系统可实现受力平衡。天梯上任意一微元k(可看作质点)受力情况如图1下半部分所示。其中,Tk+为k点以上部分对k点施加的向上拉力,Tk-为k点以下部分对k点施加的向下的拉力,Fc为公转产生的离心力,mkgk为k点由于地月引力产生的重力。若要维持k点受力平衡,所有力的矢量和应为零,即Tk++mkgk=Fc+Tk-。
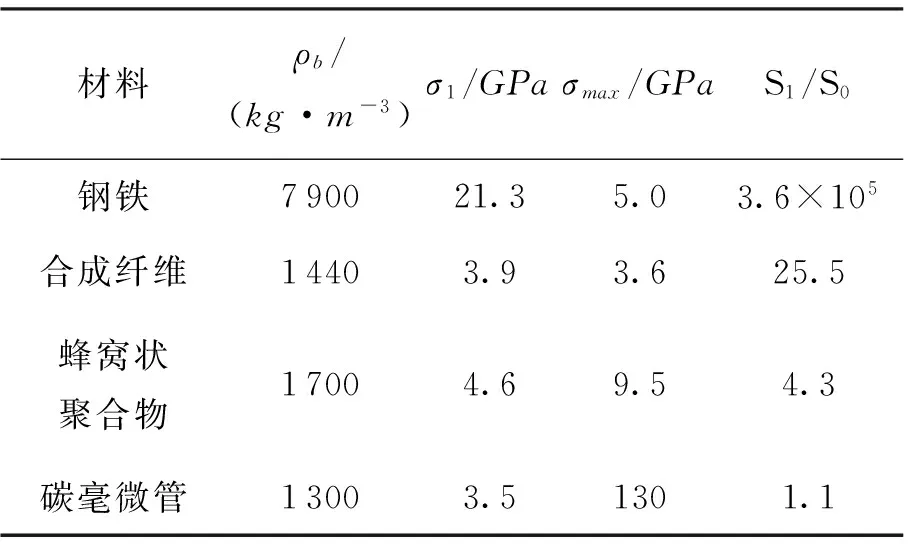
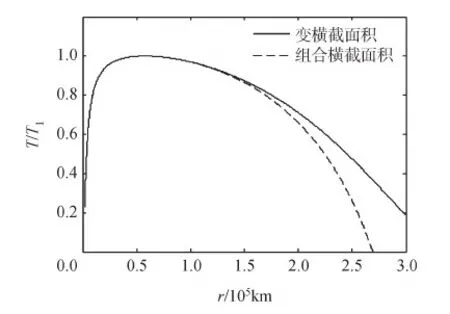
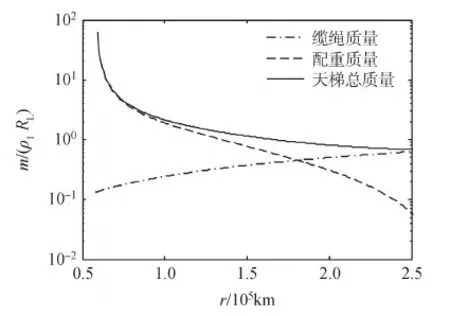
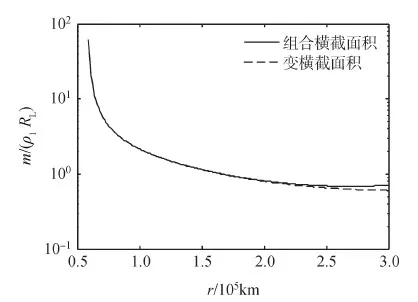
当k点位于拉格朗日点L1时,mkgk=Fc,因此Tk+=Tk-。L1点以下(靠近月球方向),mkgk 为简化分析,可将月球天梯等效为由缆绳连接的若干质点组成的系统,如图2所示。 图2 月球天梯等效简化示意Fig.2 Simplification of lunar space elevator 其中,A为天梯末端连接的质点(即配重),B为天梯与月球表面连接点;OXYZ为原点位于地球质心的任一惯性参考坐标系,X、Y、Z轴成右手直角坐标系。 月球天梯上任意一点在惯性参考坐标系OXYZ的动力学方程可描述为[6] (1) (2) 式中:μ为地球引力常数;R为地心指向该点的矢径;μL为月球引力常数;r为该点指向月心的矢径。 根据式(1),A点和k点的动力学方程可表示为 (3) 为了定量分析月球天梯力学特性,需做如下假设:月球运行轨道为圆轨道;天梯仅受地球和月球的牛顿引力;地月系统质心与地球质心的偏差忽略不计;不考虑缆绳产生的弹性形变。基于上述假设,月球天梯可实现受力平衡,并随月球以角速度ω绕地球旋转,动力学方程可进一步表示为 (4) 当A点位于L1与地球质心O连线上,且距离月心足够远或具有较大质量时,缆绳呈拉紧状态且与地月连线重合,此时A点拉力TA: (5) 式中:uA表示A点对应的拉力系数;u为无量纲拉力系数: (6) 式中:χ=r/RL,RL≈384 400 km为月球公转轨道半径;χ1=r1/RL,r1≈58 021 km为拉格朗日点L1到月球质心的距离;ε=μL/μ≈1/81.3为月球与地球质量比,可见u为月心距r的函数。图3给出了u随r的变化曲线。 图3 参数u和q随r变化曲线Fig.3 Variations of parameters u and q with r 根据式(4)可以得到月球天梯内部拉力T动力学方程: (7) 由式(4)可知,T在拉格朗日点L1(r=r1)达到最大值。r 由式(7)可知,T的变化规律由r和ρ确定。线密度ρ还可表示为ρ=Sρb,其中S为天梯缆绳的横截面积,ρb为缆绳材料的体密度。线密度ρ决定了天梯横截面积变化规律,从而决定了天梯构型。因此,利用式(7)即可计算不同构型天梯的内部拉力,在天梯建造总体方案确定过程中,为天梯的构型和材料的选择提供依据。 ρ为常数时,表示天梯缆绳为等横截面积;ρ为变量时,表示天梯缆绳为变横截面积。不同构型的天梯质量、拉力不同,对缆绳材料特性的要求也不同。下面分别进行分析。 3.1 等横截面积天梯(构型A) ρ为常数时,天梯缆绳为等横截面积。式(7)右端变量仅为r,两端分别进行积分可得: (8) 式中:T1为拉格朗日点L1处的拉力,q: (9) 由式(9)可知,q也为r的函数且无量纲,其变化曲线见图3。 下面讨论不加配重时等横截面积天梯的长度。将缆绳看做一个整体,不加配重时若要实现平衡,则仅受地月引力和离心力。此时缆绳A、B端的拉力为零[7]。对于B点(即r=r0处,r0≈1 737.4 km为月球半径),由于T=0,可通过式(8)解出T1/ρ: (10) 将r=r0代入后,得到T1/ρ=σ1/ρb=2.697 6×106(σ1=T1/S,为缆绳在L1处的应力,也即缆绳内部最大应力)。对于A点有: (11) 将T1/ρ值代入式(11),即可解出A点对应的月心距rA=2.923×105km。则天梯长度L=rA-r0=2.905 6×105km。由上述分析可知,对于不加配重的等横截面积月球天梯,σ1/ρb为定值,当材料一定时,体密度ρb、可承受的极限应力σmax、L1处的应力σ1即可确定。若σ1<σmax,则该材料可用作建造月球天梯。表1给出了不同材料对应的的ρb、σ1、极限应力σmax。 表1 不同材料的密度及应力 由表1可见,钢铁的σ1可达到21.3 GPa,σmax仅为5 GPa,不能作为建造材料。同样,合成纤维σ1>σmax,也不能作为建造材料。而蜂窝状聚合物和碳毫微管均满足要求。 3.2 变横截面积天梯(构型B) 由月球天梯内部拉力T变化规律式(7)可知,T随月心距r变化。若天梯缆绳横截面积S(或线密度ρ)也随T按同样规律变化,可保证天梯内部应力σ=σ1=T/S=Tρb/ρ为常值,则有dT=σdS。利用这一条件,将式(7)积分,得到: (12) 根据式(12),ρ和S的变化规律为 (13) 式中:ρ1和S1分别为拉格朗日点L1处的线密度和横截面积。 由式(12)、(13)可以看出,T、ρ和S均随r以指数形式变化。由等横截面积天梯内部应力分析可知,一旦材料确定,σ1即确定,有可能大于材料本身的极限应力σmax。而变横截面积天梯的优势在于,对于特定材料,σ1=T1/S1理论上可设计为任意值,考虑一定安全余量,设计时一般将σ1取为σmax/3。 值得注意的是,材料确定后,vt即确定,天梯在L1处的横截面积S1与月面处横截面积S0的比: (14) 不同材料的S1/S0见表1。由表1中结果可以看出,不同材料对应的面积比不同,考虑到可实施性,不适宜选用面积比过大的材料(如钢铁)。 由第3.1节分析可知,等横截面积天梯长度为2.905 6×105km。若在天梯终端A施加配重,可在一定程度上减少天梯长度。联立式(5)和式(12),可得配重质量mA的表达式: (15) 下标A表示u、q、r在A点处的取值。将式(13)中的线密度对r积分,得到天梯缆绳质量mt的表达式: (16) mA+mt即为天梯总质量。 3.3 组合横截面积天梯(构型C) 若天梯在拉格朗日点L1至月面B点之间部分采用变横截面积,L1至终端A点之间采用等横截面积,构成组合横截面积天梯。天梯内部拉力T为: (17) 线密度为 (18) 联立式(5)和式(8)可得配重质量mA的表达式: (19) 将式(18)积分,得到天梯缆绳质量mt的表达式: mt=ρ1(rA-r1)+ (20) 3.4 月球天梯关键参数对比分析 本节进行变横截面积天梯(构型B)和组合横截面积天梯(构型C)的关键参数对比。为定量分析,将两种构型的天梯在L1处横截面积S1取相同值,则二者T1相同。建造材料均选为蜂窝状聚合物,其特性参数见表1。 根据式(12)和式(17),图4给出了两种构型天梯内部的拉力变化曲线。由于二者T1相同,图4中对T进行了无量纲化处理,纵坐标为T/T1。由图4可见,在月面B点至L1点部分,拉力单调递增,到达L1时达到最大值1,随后单调递减。由于B点至L1点部分构型一致,两种天梯这一部分拉力相同。经过L1点之后,构型C天梯拉力小于构型B天梯,二者拉力差随月心距r增加而增加。 图4 天梯内部拉力变化曲线Fig.4 Tension of space elevator 根据式(13)和式(18),图5给出了两种构型天梯的横截面积变化曲线。由于二者S1相同,图5中对S进行了无量纲化处理,纵坐标为S/S1。由图5可见,由于B点至L1点部分构型一致,两种天梯这一部分横截面积相同。经过L1点之后,构型C天梯横截面积为恒定值S1,构型B天梯横截面积随月心距r增加而减小。图6给出了两种构型天梯的应力变化曲线,同样进行了无量纲化处理。由图6可见,构型B天梯应力为恒定值;构型C天梯应力在L1点以下为恒定值,经过L1点之后,应力随月心距增加而减小。 根据式(19)和式(20),图7给出了构型C天梯的缆绳质量mt、配重质量mA及总质量m。由于天梯长度至少应高于L1点才可保持平衡,图7中给出了L1点高度以上的质量变化曲线,并将质量做了无量纲化处理,纵坐标为m/(ρ1RL)。由图7可见,天梯长度越长,缆绳质量越大,维持平衡所需配重越小。由于配重质量起主导作用,天梯总质量随长度增加而减小。构型B天梯质量特性具有相同特质。 图8给出了构型B和构型C天梯总质量变化曲线。由图8可见,构型C天梯总质量略大于构型B,二者质量差异随天梯长度增加而增加。 图5 天梯横截面积变化曲线Fig.5 Cross sectional area of space elevator 图6 天梯应力变化曲线Fig.6 Stress of space elevator 图7 构型C天梯质量Fig.7 Mass of space elevator in type C 下面给出特定天梯长度、横截面积下构型B和构型C天梯的特性参数,材料仍选择为蜂窝状聚合物。初始条件如下:ρb=1.7×103kg/m3,σ1=σmax/3=3.17 GPa,S0=0.2 mm2,r=2×105km,L=rA-r0=1.98×105km。 图8 不同构型天梯质量对比Fig.8 Mass comparison between different types of space elevator 根据面积比公式(14)可得S1=0.86 mm2,从而T1=2.72×103N。根据式(15)、(16),构型B天梯总质量m=449.2×103kg,构型天梯总质量m=456.2×103kg,二者总质量相差7×103kg。 3.5 工程应用 根据文献[11],月球天梯的长度由地月间载荷运输的任务需求给出,可看作月球天梯总体方案设计的输入。长度确定后,即可根据第3.1~3.3节推导的关键特性参数公式进行月球天梯总体参数的确定。月球天梯建造时,由航天器将天梯缆绳运载至拉格朗日点并向月球表面释放,考虑到航天器的运载能力及运载成本,应尽量降低月球天梯的总质量。 由式(15)、(16)、(19)、(20)及图8可知,月球天梯总质量与构型、长度、L1点横截面积相关,对于相同长度和L1点横截面积的月球天梯,本文推导的构型B比构型C具有更低的总质量。因此,在确定构型时,应选择可减轻系统总质量的构型。 当天梯长度、构型、材料确定后,便可根据式(12)、(14)、(15)、(16)分别计算月球天梯系统的内部拉力、面积比、缆绳质量、配重质量以及总质量等参数,从而确定总体设计方案。 本文建立了月球天梯动力学模型,在此基础上推导了等横截面积天梯和变横截面积天梯两种不同构型的动力学方程和质量特性方程,进行了不同构型天梯关键特性参数的计算和对比分析。根据分析结果,可以得到如下结论: 月球天梯关键特性参数与建造材料、天梯构型有关。对于等横截面积天梯,当建造材料确定时,天梯内部最大应力一定,这就需要材料可承受的极限应力必须大于这一值,因而对材料要求较为严苛。而本文推导的变横截面积天梯可将最大应力设计为任意恒定值,降低了对材料极限应力的要求,可完全替代等横截面积天梯。采用变横截面积构型,利用现有材料即可实现月球天梯的建造。由质量特性分析可知,变横截面积天梯总质量小于组合横截面积天梯,因此为最优构型方案。 References) [1] PEARSON J. Konstantin Tsiolkowsky and the origin of the space elevator[C]∥48th IAF Congress Inernational Astronautical Federation,Turin,Italy,October 6-10,1997:231-239. [2] PEARSON J,LEVIN E,OLDSON J,WYKES H. The lunar space elevator[C]∥55th International Astronautical Congress 2004,Vancouver,Canada,October 4-8,IAC,2004:1-11. [3] PEARSON J. The orbital tower: a spacecraft launcher using the earth′s rotational energy[J]. Acta Astronautica,1975,2(9):785-799. [4] PEARSON J. Anchored lunar satellites for cislunar transportation and communication[J]. Journal of the Astronautical Sciences,1979,27(1):39-62. [5] EDWARDS B. Design and development of a space elevator[J]. Acta Astronautica,2000,47(1):735-746. [6] EDWARDS B. A space elevator based exploration strategy[C]∥Space Technology and Applications International Forum,STAIF 2004,Albuquerque,New Mexico,USA,February 8-11,2006:854-862. [7] EDWARDS B. The space elevator: concept overview[C]∥8th International Conference and Exposition on Engineering,Construction,Operations,and Business in Space,Albuquerque,New Mexico,USA,March 17-21,2002:77-83. [8] EDWARDS B. The space elevator development program[C]∥55th International Astronautical Congress 2004,Vancouver,Canada,October 4-8,IAC,2004:3004-3012. [9] EDWARDS B. Private investment and space elevator development activities[C]∥56th International Astronautical Congress 2005,Fukuoka,Japan,October 16-21,2005:341-352. [10] ARAVIND P K. The physics of the space elevator[J]. American Journal of Physics,2007,75(2):125-130. [11] LEVIN E M. Lunar tether transport[R].Washington:NASA,2005. [12] BUROV A A,GUERMAN A D,KOSENKO I.Equilibrium configurations and control of a moon-anchored tethered system[J]. Adv. Astronaut. Sci.,2013,146(1):251-266. [13] BUROV A A, KOSENKO I. Pendulum motions of extended lunar space elevator[J]. Mechanics of Solids,2014,49(5):506-517. [14] 陈少伍,董光亮,樊敏,等.月球轨道交会对接航天器相对状态误差分析[J].中国空间科学技术,2014,34(5):32-40. CHEN S W,DONG G L,FAN M,et al. Relative position and velocity error covariance analysis of two spacecraft in lunar orbit rendezvous and docking[J]. Chinese Space Science and Technology,2014,34(5):32-40(in Chinese). [15] 毛正阳,方群,李克行,等.应用改进果蝇优化算法的月面巡视器路径规划[J].中国空间科学技术,2014,34(5):87-93. MAO Z Y,FANG Q,LI K X,et al. Path planning for lunar rover based on modified fruit fly optimization algorithm[J]. Chinese Space Science and Technology,2014,34(5):87-93(in Chinese). (编辑:车晓玲) Research on mechanical characteristics of lunar space elevators LI Meng*,CHEN Weiyue,YANG Sheng,GAO Xu InstituteofMannedSpaceSystemEngineering,ChinaAcademyofSpaceTechnology,Beijing100094,China The mechanical and mass characteristics are determined by the structure of lunar space elevator. Most of current researches about lunar space elevators only focus on combined-cross-section structure. Various structures of lunar space elevators were investigated. To analyze the mechanical and mass characteristics, the dynamic model of the space elevator was established. By supposing the density and stress as constant respectively, two different kinds of lunar space elevators called fixed-cross-section structure and tapered-cross-section structure were obtained and compared.The results show that the maximum stress of tapered-cross-section structure can be designed as any constant value, which reduces the requirement of margin stress of the material. As a result, tapered-cross-section structure also has the least mass, which could be considered as the optimal choice. lunar space elevator;mechanical characteristics;mass characteristics;combined-cross-section;fixed-cross-section structure;tapered-cross-section;Lagrangian point 10.16708/j.cnki.1000-758X.2016.0030 2015-08-17; 2015-12-29;录用日期:2016-02-24; 时间:2016-04-29 10:49:57 http:∥www.cnki.net/kcms/detail/11.1859.V.20160429.006.html 李蒙,陈伟跃,杨胜,等.月球天梯力学特性研究[J].中国空间科学技术,2016,36(3):63-69.LIM, CHENWY,YANGS,etal.Researchonmechanicalcharacteristicsoflunarspaceelevators[J].ChineseSpaceScienceandTechnology, 2016,36(3):63-69(inChinese). V411 A http:∥zgkj.cast.cn *通讯作者:李蒙(1984-),男,工程师,博士,Arahms@foxmail.com,主要研究方向为飞行器总体设计2 月球天梯动力学模型






3 月球天梯关键特性参数推导




4 结束语
