空间站柔性机械臂辅助舱段对接动力学分析
2016-04-13危清清王耀兵唐自新张大伟
危清清,王耀兵,唐自新,张大伟
1.空间智能机器人系统技术与应用北京重点实验室, 北京 100094 2.北京空间飞行器总体设计部,北京 100094
空间站柔性机械臂辅助舱段对接动力学分析
危清清1,2,*,王耀兵1,2,唐自新1,2,张大伟1,2
1.空间智能机器人系统技术与应用北京重点实验室, 北京 100094 2.北京空间飞行器总体设计部,北京 100094
为验证空间站柔性机械臂系统在有初始位置、姿态误差的情况下能否成功完成辅助舱段对接任务,文章建立了空间站柔性机械臂辅助舱段对接动力学模型,模型考虑了对接机构的接触碰撞,依据关节精细动力学模型、力矩控制方法和阻抗控制程序进行了空间柔性机械臂辅助舱段对接过程仿真。仿真结果表明,当关节输出端位置测量精度为17位时,依靠阻抗控制的方法,空间柔性机械臂在主动舱存在最大位置误差150 mm,最大姿态误差2.5°的情况下仍能完成对接;对接成功后,空间柔性机械臂系统控制力迅速下降,仍然能较好地保持构型,不会影响对接舱段的安全。
空间机械臂;辅助对接;关节动力学;力矩控制;阻抗控制
20世纪60年代以来,美国和俄罗斯(前苏联)进行过多次空间对接活动[1-4],在未来中国空间站建设中,空间对接也是必不可少的[5]。空间机械臂辅助舱段对接是指当主动(追踪)舱段与被动(目标)舱段接近时,安装在被动舱上的空间机械臂抓着主动舱运动,使主动对接机构向被动对接机构的对接口接近,并提供动力来克服对接机构捕获过程中的阻力,依靠安装在主、被动舱上的对接机构实现两舱对接。就异体同构周边式对接机构而言,对接过程为:主动对接机构“捕获环+导向瓣”的伸出→主、被动对接机构的捕获→校正→拉紧→主、被动对接机构对接框刚性密封锁紧[6]。
针对导向瓣内翻型异体同构周边式对接机构,加拿大SPAR公司研制的航天飞机遥操作机械臂系统[5](Shuttle Remote Manipulator System, SRMS)执行了两次发动机喷气对接任务[6-9],一次为和平号空间站与航天飞机对接的STS-74任务;另一次为曙光号多功能舱与团结号节点舱对接的STS-88任务。SRMS抓取主动舱,并将其运送到被动舱对接机构的捕获环前。当两个捕获环接触后,接触传感器给出接触信号,此时机械臂转为limp模式(即机械臂各个关节处于解锁且不控制状态),主动舱发动机喷气沿轴向推进,完成对接。此对接方法依靠主动舱的喷气推进提供对接所需动力,故称之为发动机喷气对接。此方法过程简单,技术成熟,有成功应用的先例,一般适用于空间站轴向对接,当侧向对接时,发动机喷气方案会给空间站姿态带来很大的扰动,甚至会带来空间站姿态失控的危险。
与发动机喷气对接不同,空间机械臂辅助舱段对接是依靠空间机械臂提供对接所需动力以克服对接机构捕获过程中的阻力[6]。空间机械臂辅助舱段对接具有主动舱与被动舱之间的冲击小、对空间站姿态影响小、安全性高、适用于各个方向对接等优点,是将来舱段对接的趋势。然而,利用空间机械臂辅助舱段对接目前国外还没有应用先例。
空间机械臂辅助舱段对接时,缺乏有效的传感器支持,不能直接测量主、被动捕获环之间的作用力;同时,测量、控制等误差的存在使得空间机械臂并不能完全按照规划轨迹运动。影响空间机械臂辅助舱段对接的技术难点在于:1)空间机械臂在没有力传感器的情况下,能否准确感知外力并作出应对;2)空间机械臂辅助对接时能否提供足够动力以完成对接,并保证对接过程中捕获环之间的碰撞力不能过大;3)空间机械臂在辅助对接过程中能有效地控制自身构型,不会影响空间站的安全。
文献[6]详细论证了利用阻抗控制方法可在没有力传感器的情况下,来感知主动捕获环受到的外力,本文在此基础上,建立空间机械臂辅助舱段对接过程中的动力学模型,利用阻抗控制方法与基于关节扭转变形的力矩测量方法对空间机械臂辅助对接过程进行控制,以期解决以上3个技术难点,指导空间机械臂的设计。
1 空间机械臂辅助舱段对接过程中的动力学建模
为了给控制系统提供控制对象,本文利用ADAMS多体动力学系统建模软件建立机械臂辅助舱段对接动力学模型(如图1所示)。机械臂动力学模型包括主动舱、被动舱、对接机构和空间机械臂系统组成,其中主动舱质量约25 t,被动舱质量约50 t,二者在同一量级,故将整个对接过程设置为浮动基座,并忽略了重力的影响。空间机械臂是开环链式结构,一共由7个旋转关节组成,与核心舱相连的是机械臂肩部3个关节(关节1、2、3),与实验舱相连的是腕部3个关节(关节5、6、7),腕部与肩部相对于肘关节(关节4)对称。本文在ADAMS多体动力学模型中考虑了柔性臂杆、柔性关节壳体和对接机构等的因素的影响,其中,机械臂初始构型、机械臂辅助舱段对接系统的组成请查阅参考文献[6]。
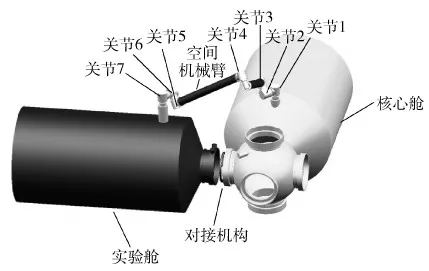
图1 机械臂辅助舱段对接ADAMS模型Fig.1 ADAMS model of space manipulator assisted docking of space station
定义坐标系Fexeyeze固连在主动捕获环上,xe轴沿主动舱及主动捕获环的轴线指向被动捕获环、ye轴与ze轴均垂直于xe轴,且符合右手法则;空间机械臂抓着对接舱段沿着对接方向(xe向)前进,对接机构主动捕获环与被动捕获环在导向瓣的导向作用下相互靠近(如图2所示),捕获锁捕获并锁紧时捕获成功。
机械臂辅助舱段对接时,出于安全性考虑,舱段间相对运动速度很低(约为0.015m/s),接近于静态过程,因此对接机构导向瓣在相对滑入的过程中,需要机械臂提供动力以克服对接机构间的接触力以及捕获锁的触发力。
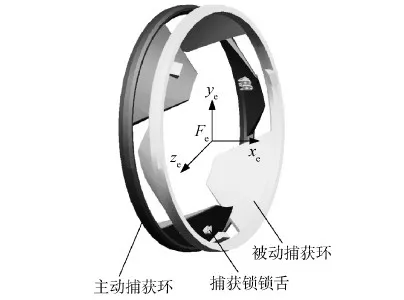
图2 主动捕获环与被动捕获环捕获Fig.2 Capture of docking mechanism
1.1 空间机械臂柔性臂杆动力学建模
根据SRMS臂杆柔性的处理经验与机械臂实际受力特点,本文将柔性臂杆当作Euler-Bernoulli梁处理,采用假设模态法描述臂杆柔性变形与臂杆运动之间的关系,臂杆变形量为
(1)
式中:φi(x)为第i阶模态振型函数;qi(t)为第i阶模态坐标。
采用拉格朗日法建立机械臂的动力学模型为

1.2 空间机械臂柔性关节壳体动力学建模
空间机械臂关节由于减重的需要,壳体设计得比较薄,关节各个方向的刚度在一个量级,因此,壳体拉、压、弯、扭的刚度都需考虑。
本文利用ADAMS中Bush连接来模拟关节壳体除转动方向的刚度(如图3所示)。关节转动方向的扭转刚度将在下一节中考虑。
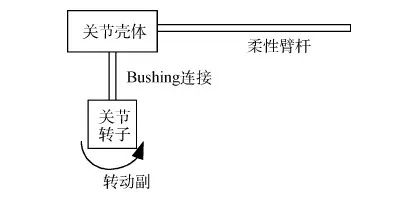
图3 关节壳体柔性处理Fig.3 Modeling of flexible joint
关节转子与关节壳体之间的作用力为
(3)
式中:刚度阵Ks、阻尼阵Bs为6×6的对角阵;关节转子与关节壳体之间的变形向量Δx为6×1向量。
1.3 对接机构动力学建模
(1)接触区域判断
根据导向瓣内翻型异体同构周边式对接机构的特点,将对接机构可能发生接触的区域仔细划分[10](如图4所示)。
图4中g1、g2、g3、g4、g5、g6,q1、q2、q3、q4、q5和q6为导向瓣侧沿;y1、y2、y3、y4、y5和y6为导线瓣壳体侧面;z1、z2、z3、z4、z5和z6为捕获环作用弧段。则主动捕获环与被动捕获环可能的接触情况分为12种(见表1)。表1中第一行是导向瓣侧沿之间的接触,第二行是导向瓣侧面与捕获环作用弧段的接触。

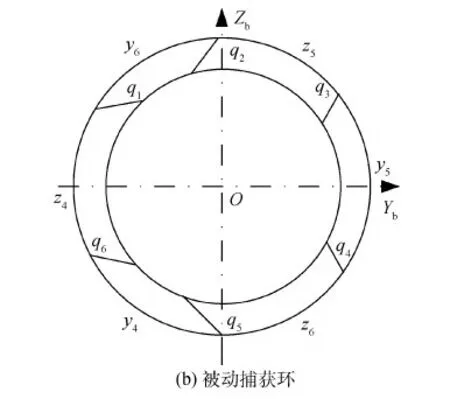
图4 导向瓣内翻型异体同构周边式对接机构可能的接触碰撞区域Fig.4 Contacting areas of the docking mechanism

对接瓣g1-q3g2-q2g3-q1g4-q6g5-q5g6-q4对接框y1-z3y2-z2y3-z6y4-z4y5-z1y6-z3
(2)接触力模型
假设主动捕获环与被动捕获环接触点是小变形[4,5],且满足线弹性变形,引入接触刚度kc和接触变形量δc,则接触正压力Fc大小为
(4)
式中:c为阻尼系数,正压力的方向为接触作用点公法线方向。
两接触点之间的摩擦力:
(5)
式中:μs为静摩擦系数;μm为动摩擦系数;vf为临界速度;v为两接触点之间的切向相对速度。
2 对接过程控制系统建模
空间机械臂辅助舱段对接时,不仅需要控制机械臂的轨迹,还需克服对接机构之间的阻力,控制系统分为系统控制与关节控制两部分。系统控制根据机械臂末端实际位置与规划位置之差,解算成力指令,并合理分配至各个关节;关节控制根据系统控制分配的力控制指令,经过控制解算,准确完成。
2.1 系统控制模型
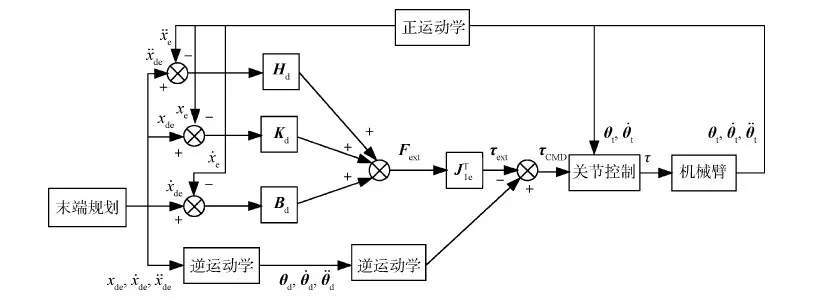
图5 系统控制流程Fig.5 System control of space manipulator
设计机械臂系统刚度阵Kd、阻尼阵Bd、质量阵Hd即可让机械臂在对接方向表现出较大刚度以克服对接过程的阻力,同时在其他方向表现出较大的柔顺性,避免对接机构卡死或者碰撞力过大的现象出现。
2.2 关节动力学与控制模型
文献[11]针对空间机械臂复杂关节建立了关节精细动力学模型,并在此基础上提出了基于关节扭转变形的关节力矩控制模型(如图6所示)。

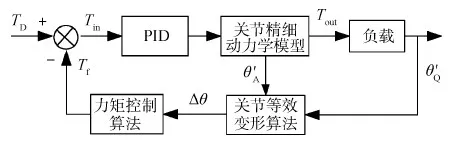
图6 关节控制模型Fig.6 Joint control of space manipulator system
3 空间机械臂辅助舱段对接仿真
3.1 空间机械臂辅助舱段对接初始条件
由于测量、控制等的误差不可避免,空间机械臂辅助舱段对接时必然存在着初始误差。为了节省篇幅,本文将主动舱的初始位置、姿态误差取为:沿ye向与ze向各有100mm的位置误差;xe向、ye向与ze向各1.2°的姿态误差,在此典型初始位置、姿态误差情况下进行仿真。主动捕获环与被动捕获环xe向初始距离为220mm。
空间机械臂采用第2.1节的阻抗控制策略,阻抗控制参数的设定参考文献[6],将xe向刚度系数设为8 000,阻尼系数设为2 000,其他方向所有系数均取为0。空间机械臂抓着主动舱沿xe向以15mm/s前进。关节输出端角度测量精度为17位。
3.2 空间机械臂辅助舱段对接仿真与分析
对接机构主动捕获环圆心位置、姿态随时间变化的曲线见图7与图8。对接机构主动捕获环约在2s时与被动捕获环发生接触,随后ye向、ze向的位置误差与xe向、ye向、ze向的姿态误差开始慢慢被矫正,第9s时,空间机械臂辅助舱段对接成功。在此过程中,空间机械臂克服了ye向与ze向各100mm的位置误差,同时也克服了xe向、ye向和ze向各0.02rad(1.2°)的姿态误差(见图7、8)。
各关节转角随时间变化的曲线见图9。由图9可知,空间机械臂辅助舱段对接过程中,各个关节转动的最大角度约0.14rad(约8°)。关节4与关节5是转角最大的两个关节。对接成功后各关节角度略有变化,这说明对接成功后空间机械臂仍然能较好地保持构型,不会影响空间站安全。
图7 主动捕获环位置随时间变化Fig.7 Distance between two parts of the docking mechanism
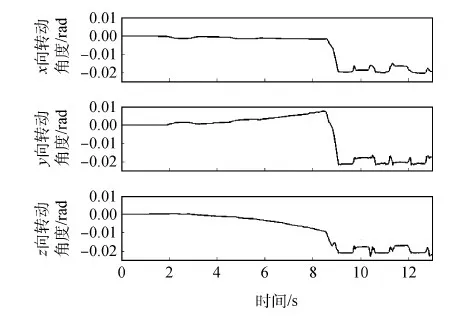
图8 主动捕获环姿态随时间变化Fig.8 Attitude between two parts of the docking mechanism
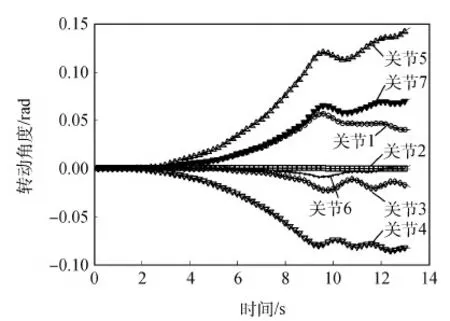
图9 各关节转角随时间变化Fig.9 Joint angle of space manipulator system
空间机械臂阻抗控制力及主动捕获环x向速度随时间变化的曲线如图10、11所示。显然,空间机械臂只在xe向(对接方向)有控制力,其他方向的力为0。对比图10与图11可知,前2.5s空间机械臂的控制力主要用于对接舱段的加速;从2s到5.2s,对接机构主动捕获环与被动捕获环发生接触,为了克服被动捕获环给主动捕获环的阻力,控制力继续增加,而此时主动捕获环的速度发生较大的振动。第9s对接成功后,控制力立刻下降,主动捕获环仍然有较大的速度波动,此时主动捕获环与被动捕获环发生较大的碰撞,控制力与主动捕获环速度均表现出明显的周期性,周期为2s。
机械臂阻抗控制程序得到的关节控制力矩,经关节动力学模型后输出给ADAMS动力学模型,各关节输出力矩如图12所示。
由图12可知,关节1、关节2、关节4与关节6输出力矩最大,关节输出力矩的最大值为1 102N·m。仿真表明,此最大力矩与空间机械臂沿xe向的规划速度相关。
主动捕获环与被动捕获环之间的碰撞力(如图13所示)也进一步证明了主动捕获环与被动捕获环约从2s开始发生碰撞,第9s对接成功后,碰撞力急剧变大,这是由于主动舱在捕获锁捕获成功后以约0.015m/s的速度与被动舱撞击,主动舱与被动舱质量都比较大,导致碰撞力急剧变大,后续逐渐衰减。主动舱与被动舱的最大碰撞力为6 590N。本文选取ye向不同的位置误差与姿态误差进行进一步仿真(见表2与表3),按照上文中的控制方法和控制参数,ye向最大位置误差可达150mm,最大姿态误差可达2.5°。最大关节控制力矩约为1 100N·m,最大碰撞力约4 300N,对接均在9s左右时对接成功。这说明该控制方法能克服较大的误差。
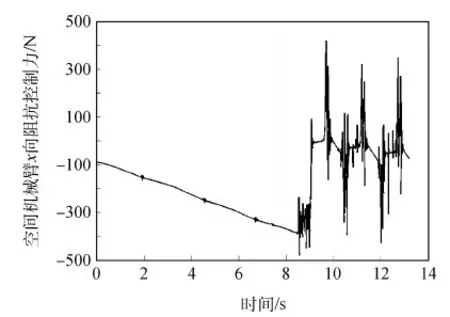
图10 空间机械臂xe向阻抗控制力随时间变化Fig.10 Impedance force of xe direction of space manipulator system
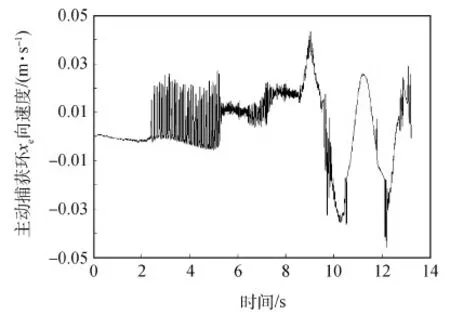
图11 主动捕获环xe向速度随时间变化Fig.11 Speed of xe direction of the docking mechanism
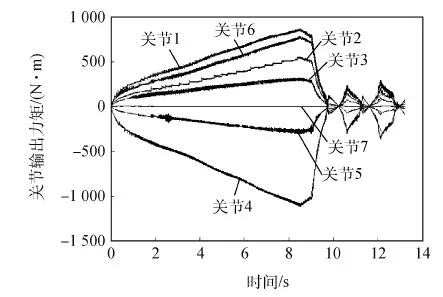
图12 各关节输出力矩随时间变化Fig.12 Joint torque of space manipulator system
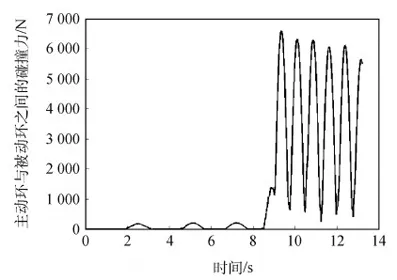
图13 主动捕获环与被动捕获环的碰撞力随时间变化Fig.13 Contacting force between the two parts of the docking mechanism
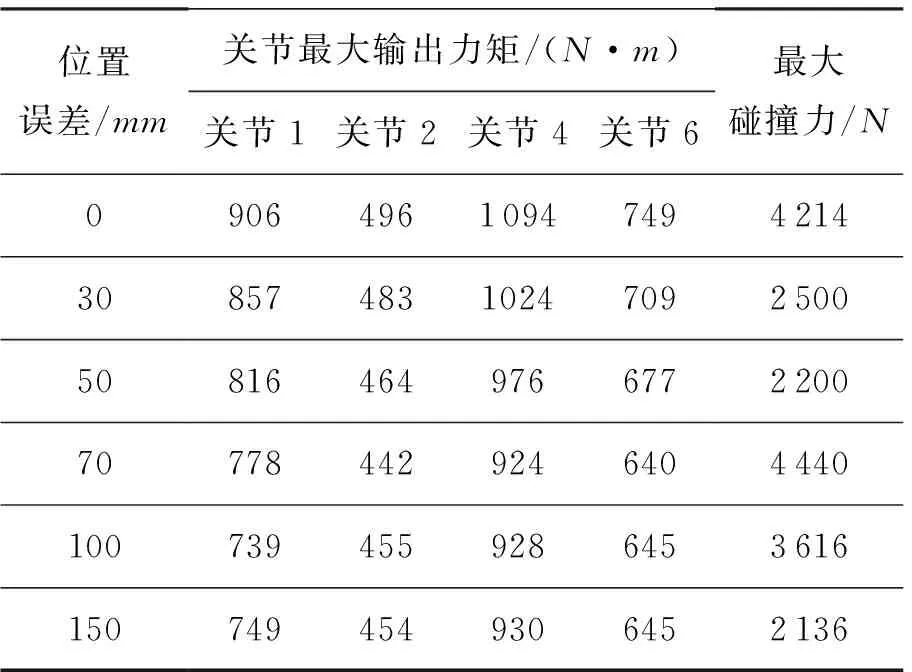
位置误差/mm关节最大输出力矩/(N·m)关节1关节2关节4关节6最大碰撞力/N090649610947494214308574831024709250050816464976677220070778442924640444010073945592864536161507494549306452136
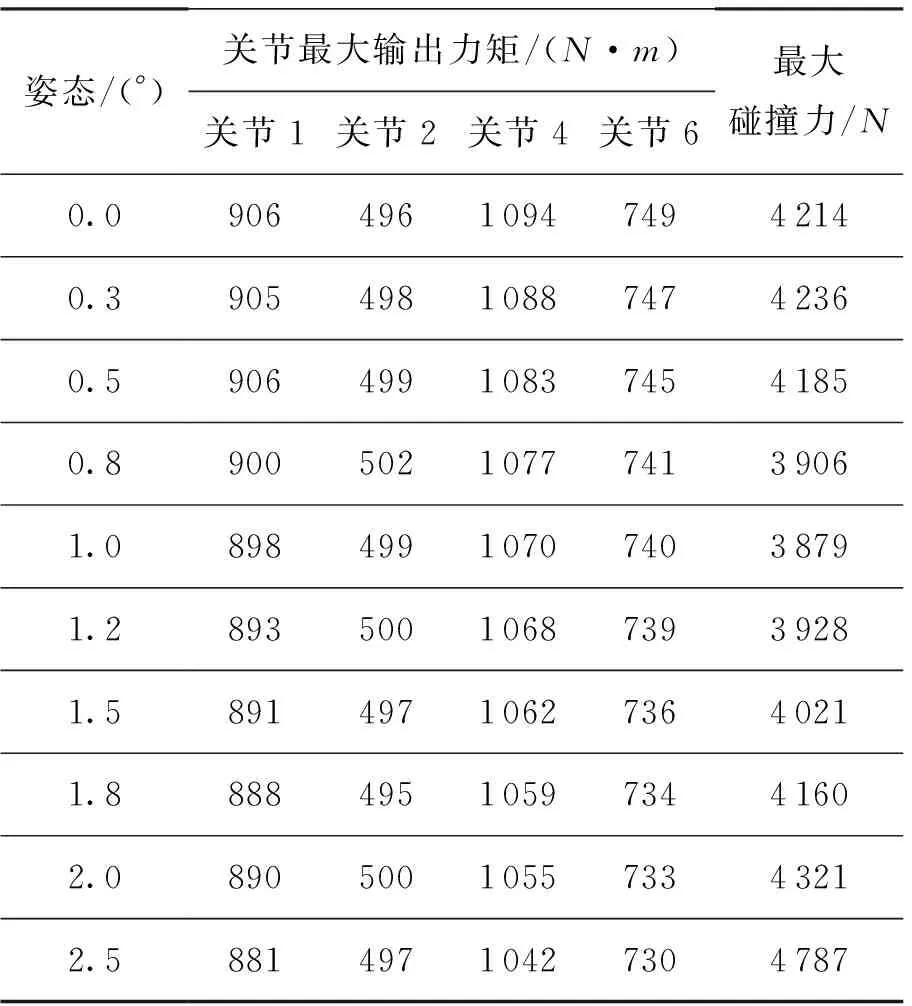
表3 垂直于对接舱轴线向不同姿态偏差的对接情况
4 结束语
本文利用ADAMS建立了空间柔性机械臂辅助舱段对接模型,结合文献[11]的关节精细动力学模型及力矩控制方法与文献[6]的阻抗控制方法,针对导向瓣内翻异体同构周边式对接机构,对空间机械臂辅助舱段对接过程进行仿真,仿真表明:
1)空间机械臂关节角度测量精度为17位时,空间机械臂能克服主动舱的初始位置、姿态误差完成对接任务。对接成功后空间机械臂仍然能较好地保持构型,不会影响对接舱段的安全;
2)空间机械臂辅助舱段对接时,在对接方向能克服较大的阻力并在其他方向表现出随动的效果,对接成功后,空间机械臂系统控制力立刻下降,体现阻抗控制方法的有效性;
3)空间机械臂辅助舱段对接过程中,肘关节需要提供的关节力矩最大,是机械臂设计、防护的重点;
4)依靠空间机械臂阻抗控制方法,主动舱垂直于轴线向可允许的最大位置误差可达150mm,最大姿态误差可达2.5°。对接过程中,最大关节控制力矩为1 094N·m,最大碰撞力为4 787N。
References)
[1] 曲广吉. 航天器动力学工程[M]. 北京:中国科学技术出版社,2000:376-393.
[2] GATES R M,WILLIAMS J E. Analyses of the dynamic docking test system for advanced mission docking system test programs,NASA-19740025662[R].Washington:NASA,1974.
[3] ERIC ILLI. Space Station freedom common berthing mechanism,NASA-92N25086[R].Washington:NASA,1992.
[4] FOTKIN N. Dynamic analysis of Apollo-Salyut/Soyuz docking,NASA-TT-F-16088[R]. Texas:NASA,1974.
[5] 刘志全,危清清,王耀兵. 载人航天器柔性机械臂动力学建模方法[J] 航天器工程,2013,22(5):34-41.
LIU Z Q , WEI Q Q, WANG Y B. Review of the flexible manipulator dynamic modeling of manned spacecrafts[J]. Spacecraft Engineering,2013,22(5):34-41(in Chinese).
[6] 危清清,刘志全,王耀兵,等. 柔性机械臂辅助空间站舱段对接阻抗控制[J] 中国空间科学技术,2014,34(6):57-64.
WEI Q Q,LIU Z Q,WANG Y B,et al. Impedance control of space flexible manipulator system assisted docking of Space Station[J]. Chinese Space Science and Technology,2014,34(6):57-64(in Chinese).
[7] QUIOCHO L J,BRISCOE T J,SCHLIESING J A,et al. Assisted docking and undocking for the orbiter repair maneuver, 20070025184[R].Texas:NASA Report,August 15,2005.
[8] QUIOCHO L J,CRUES E Z,HUYNH A N,et al. Integrated simulation design challenges to support TPS repair operations,20060055383[R].Texas:NASA Report,August 15,2005.
[9] FRICKE R W JR. STS-74 Space Shuttle mission,NSTS-37404[R].Texas:NASA,1996.
[10] FAYSSAI ABOU,BUHARIWALA H,MACLEAN K,et al. Dynamics analyses of Space Station remote manipulator system operations,IAF-97-T312[C]∥48th International Astronautical Congress,Paris,IAF,1997:1-6.
[11] 刘志全,危清清,王耀兵. 空间机械臂关节精细动力学模型的建立及关节力矩控制[J].宇航学报,2014,35(6):663-668.
LIU Z Q,WEI Q Q,WANG Y B. A joint control system based on detailed joint dynamics of space manipulators[J].Journal of Astronautics,2014,35(6):663-668(in Chinese).
(编辑:车晓玲)
Analysis on flexible space manipulator system assisted docking of space station
WEI Qingqing1,2,*, WANG Yaobing1,2, TANG Zixin1,2, ZHANG Dawei1,2
1.BeijingKeyLaboratoryofIntelligentSpaceRoboticSystemsTechnologyandApplications,Beijing100094,China2.BeijingInstituteofSpacecraftSystemEngineering,Beijing100094,China
Position errors and angle errors exist inevitably in space manipulator system assisted docking of spacecraft. A dynamic and control model concerned the contaction between the docking system was set up to simulate the space manipulator system assisted docking of spacecraft. The impedance control system associated with the detailed joint dynamic model, joint torque control system was built. The results show that the space manipulator system could overcome the initial error of the spacecraft, and finish the job of space assisted docking. The control force turned down immediately after the spacecraft was docked. Also, the space manipulator system could hold the position and shape.
space manipulator;assisted docking;joint dynamics;torque control;impedance control
10.16708/j.cnki.1000-758X.2016.0036
2016-01-11;
2016-04-11;录用日期:2016-05-11;
时间:2016-06-20 13:41:41
http:∥www.cnki.net/kcms/detail/11.1859.V.20160620.1341.004.html
危清清,王耀兵,唐自新,等.空间站柔性机械臂辅助舱段对接动力学分析[J].中国空间科学技术, 2016,36(3):
24-31.WEIQQ,WANGYB,TANGZX,etal.Analysisonflexiblespacemanipulatorsystemassisteddockingofspacestation[J].ChineseSpaceScienceandTechnology, 2016,36(3):24-31(inChinese).
V423.7;TP241.3
A
http:∥zgkj.cast.cn
*通讯作者:危清清(1985-),男,博士,工程师,weiqingqing51@sina.com,主要研究方向为航天器结构与机构设计
