精密进近阶段的多系统GNSS组合RAIM可用性算法及分析
2016-04-13蒋虎袁运斌王海涛欧吉坤蒋振伟
蒋虎,袁运斌,王海涛,欧吉坤,蒋振伟
1.中国科学院测量与地球物理研究所 大地测量与地球动力学国家重点实验室,武汉 430077 2.中国科学院大学,北京 100049 3.北京空间信息中继传输技术研究中心,北京 100094
精密进近阶段的多系统GNSS组合RAIM可用性算法及分析
蒋虎1,2,袁运斌1,*,王海涛1,欧吉坤1,蒋振伟3
1.中国科学院测量与地球物理研究所 大地测量与地球动力学国家重点实验室,武汉 430077 2.中国科学院大学,北京 100049 3.北京空间信息中继传输技术研究中心,北京 100094
给出了多系统全球卫星导航系统(GNSS)组合接收机自主完好性监测(Receiver Autonomous Integrity Monitoring,RAIM)可用性计算方法,在此基础上利用GPS、GLONASS实测数据与BDS、Galileo全星座仿真数据,分析了BDS、GPS、GLONASS和Galileo不同组合在精密进近阶段的RAIM可用性。通过试验分析发现,BDS的5颗地球同步轨道卫星和3颗倾斜地球同步轨道卫星对亚洲、非洲和欧洲大部分地区的RAIM可用性有很大的贡献。这些地区站星间几何观测结构得到改善,使得RAIM可用性相对于其他地区有很大幅度的提升。在亚太地区APV-I阶段单系统导航情况下,北斗导航系统RAIM可用性达到99.5%,高于其他三个导航系统。在精密进近阶段(APV-I、APV-II和CAT-I),BDS与其他导航系统(GPS、GLONASS和Galileo)的组合导航可以满足全球大部分区域的RAIM可用性需求,大多可达到100%。
全球卫星导航系统;接收机自主完好性监测;精密进近;地球同步轨道;倾斜地球同步
接收机自主完好性监测(Receiver Autonomous Integrity Monitoring,RAIM)是用户端完好性监测的主要手段之一。在民用航空领域的非精密进近(Non-Precision Approach,NPA)过程中,RAIM是一种简单、有效的全球卫星导航系统(GNSS)完好性监测方法[1]。RAIM主要利用冗余观测量进行卫星故障的快速检测,具有两种功能:故障检测和故障排除。这两种功能分别需要观测到5颗和6颗以上的卫星才能有效实施。而且RAIM可用性与星站几何结构的位置衰减因子(Dilution Of Precision,DOP)有很大关系。因此,在单一星座条件下,RAIM可用性相对较低,通常仅作为辅助手段被用于在航(En Route)和非精密进近阶段导航[2-3]。
另外,GNSS技术正在快速发展,BDS将于2020年完成全球组网,拥有35颗(5GEO+3IGSO+27MEO)在轨卫星[2,4]。同时,GPS正在逐步实现现代化,播发新的民用信号L5(1 176.45 MHz)[5]。欧洲的卫星导航系统Galileo目前已有8颗在轨卫星。俄罗斯的GLONASS已于2011年实现24颗卫星在轨运行,也在逐步实现现代化,并将提供3频的码分多址信号[6]。
GNSS技术的快速发展给多模RAIM带来了契机,国内外学者对基于GPS、BDS、GLONASS和Galileo等多系统组合RAIM做了大量的研究工作[7-12]。Ene分析了Galileo、GPS组合导航在有垂直方向引导的进近阶段的RAIM可用性[8]。Martineau等对Galileo、GPS组合RAIM的截止高度角、用户等效距离误差、地表格网分辨率等进行了假设分析[9]。Hewitson和Wang对GPS、Galileo和GLONASS三系统组合在APV-I、APV-II阶段的RAIM进行了分析[11]。徐君毅等推导了BDS与GPS、Galileo三系统组合导航对用户保护水平(PL)的改善值,给出了精密进近阶段APV-I、APV-II的垂直保护水平(VPL)在全球的分布[12]。已有的研究成果大多基于双系统或三系统组合,主要分析了精密进近阶段中的APV-I、APV-II两个阶段,而对于要求更高的CAT阶段很少涉及,并且对BDS的研究相对较少。为此,本文利用GPS、GLONASS实际星历与BDS、Galileo仿真数据,分析评估四系统(GPS、BDS、GLONSS和Galileo)不同组合的RAIM可用性,给出了RAIM可用性在全球的具体状况,进一步分析了在CAT-I阶段的RAIM可用性。
1 RAIM可用性算法与精密进近
1.1 航空进近对卫星导航系统的完好性要求
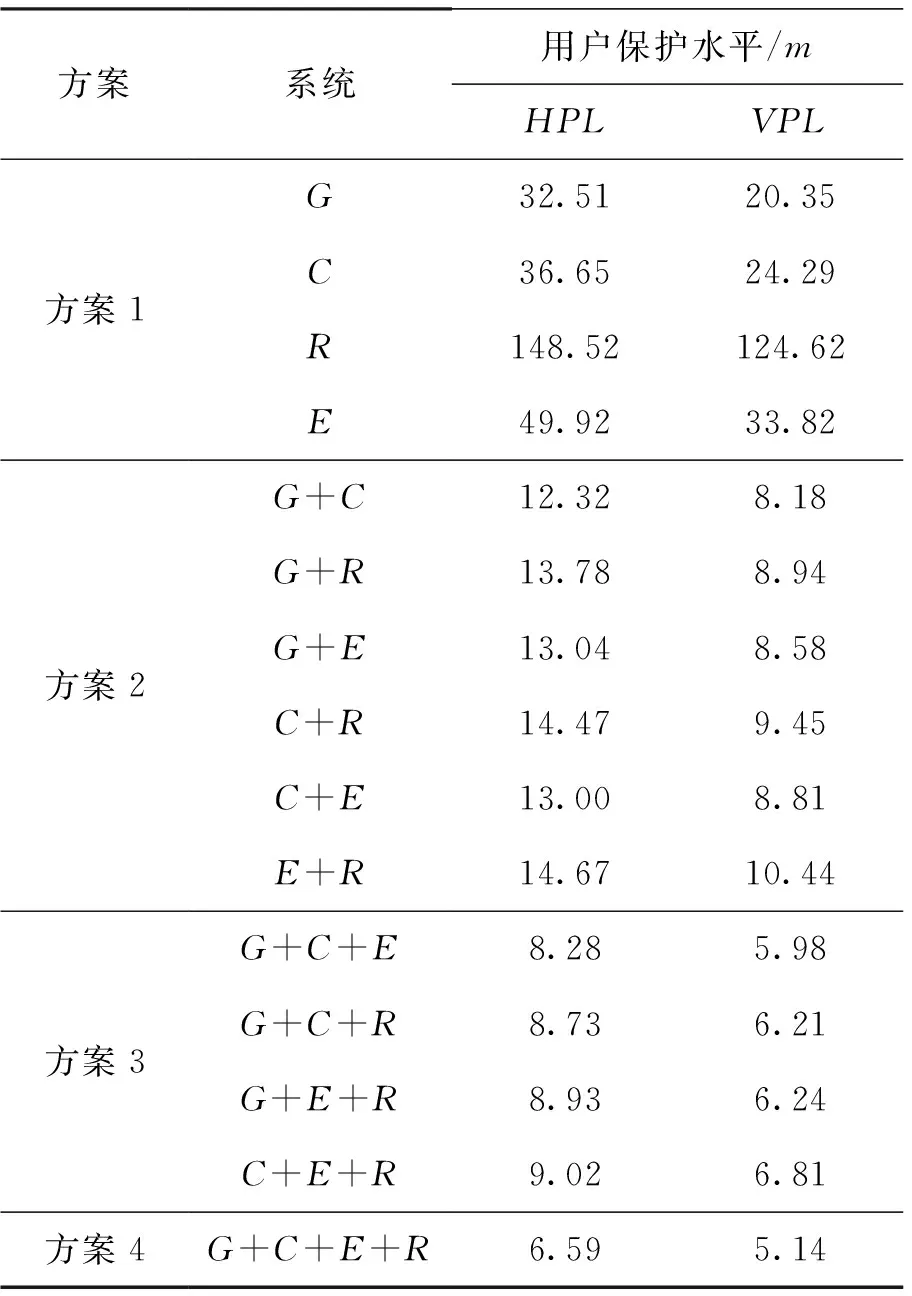
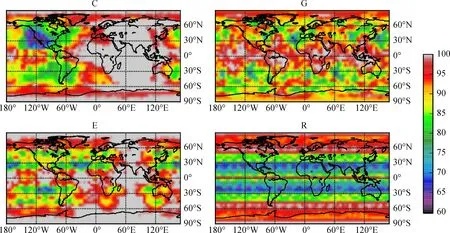
飞机进近过程主要分为两个阶段:无垂直方向引导的进近(LNAV)和有垂直方向引导的进近(LNAV/VNAV)。这两种进近也称为非精密进近(NPA)和精密进近(PA)。如图1所示,根据决定高度,精密进近主要划分为APV-I、APVII和CAT(CAT-I、CAT-II和CAT-III)三个阶段。当用户使用RAIM算法进行完好性监测时,在检测故障卫星之前,必须根据相应进近阶段的性能需求进行RAIM可用性判断。当接收机观测少于5颗卫星时,RAIM无效。如果用户可以同时接收到5颗以上卫星的观测信号,则需要根据相关的性能指标[13]判断RAIM是否可用。在精密进近过程中,判断RAIM可用性的指标主要有水平保护水平(HPL)和垂直保护水平(VPL)。用户根据DOP与UERE(用户等效距离误差)计算HPL和VPL,然后与相应阶段的水平告警限值(HAL)和垂直告警限值(VAL)比较,当HPL 图1 飞机进近过程Fig.1 Aircraft approach procedures 1.2 多模RAIM可用性算法 多模GNSS线性化的伪距高斯-马尔可夫方程为 (1) (2) 伪距残差向量 (3) 验后单位权中误差 (4) 式中:P为权矩阵。 表1 σ0各项取值及计算公式[10] (5) 如果H1成立,系统处于故障状态,应及时向用户告警。如果系统没有监测到故障则为漏警,在飞机进近的各个阶段漏警概率要求不同。给定漏警概率PMD,有 (6) 根据式(5)、(6)可确定非中心化参数λ。 在GNSS的定位解算中,对定位影响最大的是故障偏差敏感性最大的特征线斜率的卫星,其对应的漏警概率也最高[14-15]。每颗卫星的水平定位误差与故障偏差的特征线斜率 (7) 式中:Qv=RQLRT。 同理,可以得到垂直定位误差与故障偏差的斜率 (8) 所有观测卫星最大斜率值为 (9) (10) HPL、VPL为 (11) (12) 根据不同的进近阶段,用式(11)、(12)得到的HPL、VPL与相应阶段的HAL、VAL比较,如果HPL 假设在某点采样N次,其中RAIM算法可用次数为N(HPL RAIMavai= 为了分析多系统不同组合RAIM可用性,首先仿真了Galileo星座(27MEO)和BDS星座(5GEO+3IGSO+27MEO)[12,16,17],而GPS星座(32MEO)和GLONASS星座(24MEO)使用了CODE的2014年12月29日的真实星历。本试验采样间隔为300s,地表格网分辨率为5°×5°,卫星截止高度角设为10°。主要设置了,4种RAIM可用性试验方案:单系统分析,双系统组合分析(包含6种不同组合),三系统组合分析(包含4种不同组合),以及四系统组合分析。 2.1 精密进近阶段的RAIM可用性分析 本试验主要对精密进近(APV-I、APV-II和CAT-I)阶段的全球RAIM可用性及用户保护水平的分布状况进行分析。表2给出了4个方案的全球用户保护水平的平均值,可以看出,单系统时,由于GPS星座有6个轨道面,站星间几何结构较好,因此其HPL、VPL值最低;目前在中低纬度地区观测到的GLONASS卫星较少,DOP较差,用户保护水平较高。双系统组合时,GPS、BDS组合的星座卫星数最多,用户保护水平最低。三系统组合时,GPS、BDS和Galileo组合用户保护水平最低,可用性最高。四系统组合相对于其他三个方案,用户保护水平最低。因此,组合导航在很大程度上改善了用户保护水平。 表2 卫星截止高度角10°时RAIM保护水平 表2中,G代表GPS,C代表Beidou,R代表GLONASS,E代表Galileo。 图2给出了BDS、Galileo、GPS和GLONASS四个导航系统在截止高度角为10°时全球观测到的平均卫星数。从图2可以看出,由于各导航系统轨道不同,在全球不同位置观测到的卫星数有很大差异。因此,不同区域的用户可根据需求选择使用各导航系统,增加观测到的卫星数目以改善DOP,从而使RAIM算法发挥更大的作用。 APV-I进近阶段单导航系统RAIM可用性如图3所示,表3则列出了58°(E)~160°(E)区域各系统观测到的卫星数及RAIM可用性。根据图2、图3及表3可以看出,在APV-I阶段单系统导航情况下,RAIM可用性与观测到的卫星数目及DOP有很大的相关性。由于在58°(E)~160°(E)存在5颗GEO卫星以及3颗IGSO卫星,在该区域使用BDS导航时观测到的卫星数目增加,平均RAIM可用性达到99.5%。其他导航系统则不存在这种优势。 表3 58°(E)~160°(E)区域各系统观测到的卫星数及RAIM可用性 在APV-II阶段,单系统导航时RAIM可用性最高只能达到65.7%,与用户需求相差甚大,在这种情况下组合导航可以发挥很大作用。图4给出了在APV-II进近阶段双系统组合的RAIM可用性。根据图4,在双系统组合导航情况下,除了E+R和G+R这两种组合,其他4种组合在全球大部分区域RAIM可用性可达到99.9%以上。其中,有BDS参与的三种组合导航在0°~160°(E)区域,RAIM可用性最佳,而C+G组合导航改善了南美地区的RAIM可用性;G+E组合导航极大地改善了北美地区的RAIM可用性。因此,在双系统组合导航的情况下,不同地区的用户可根据需要选择不同的导航系统组合。4种三系统组合的RAIM可用性可达到99.99%。图5给出了双系统组合导航VPL在全球的分布,可以看出VPL的全球变化与观测到的卫星数和几何结构有很大的相关性。 图6给出了在CAT-I进近阶段双系统组合的RAIM可用性。从图6可以看出,在CAT-I阶段,双系统组合导航的RAIM可用性在全球大部分区域难以满足用户的需求,但是C+E、C+R和G+C三种双系统组合导航的RAIM可用性在欧洲、亚洲和非洲大部分区域能达到99.0%以上,主要原因是BDS导航系统有5颗GEO卫星和3颗IGSO卫星分布在该区域,使得该地区观测到的卫星数目和DOP得以改善。图7给出了4种三系统组合导航的全球RAIM可用性,可以看出G+E+C三系统组合导航RAIM可用性最好,在全球陆地区域基本都能达到99.5%以上,绝大部分地区能达到100%。方案4中的四系统组合导航在该阶段全球RAIM可用性可达到100%。 图2 截止高度角10°各系统观测到的平均卫星数Fig.2 Observed average satellites number of different navigation system for mask angle 10° 图3 APV-I阶段单系统RAIM可用性(%)Fig.3 Single navigation systems combination RAIM availability for APV-I approach(%) 在用户观测精度一定的情况下,RAIM可用性与观测到的卫星数和DOP相关。本文利用GPS、GLONASS实测数据与BDS、Galileo 全星座仿真数据,通过多系统组合导航,增加观测到的卫星数目,进而改善DOP,分析了四系统(GPS、BDS、GLONASS和Galileo)不同组合在多种进近阶段的全球RAIM可用性情况,得出如下结论: 图4 APV-II阶段双系统组合RAIM可用性(%)Fig.4 Double navigation systems combination RAIM availability for APV-II approach (%) 图6 CAT-I阶段双系统组合RAIM可用性(%)Fig.6 Double navigation systems combination RAIM availability for CAT-I approach (%) 图7 CAT-I阶段三系统组合RAIM可用性(%)Fig.7 Triple navigation systems combination RAIM availability for CAT-I approach (%) 1)在APV-I阶段,BDS单系统导航可以满足在亚洲、非洲和欧洲大部分区域的RAIM需求。BDS在58°(E)~160°(E)存在5颗GEO卫星和3颗IGSO卫星,改善了该区域的DOP,使得该地区的RAIM可用性得到提升。 2)在APV-II阶段,不同双系统组合导航的全球RAIM可用性具有较大的差异,用户可以根据不同的地理位置选择不同的组合导航方式。若选用三系统组合导航则可满足全球的RAIM需求。 3)在CAT-I阶段,双系统组合导航已经很难满足全球的RAIM可用性要求,但是BDS系统存在的5颗GEO卫星可以改善亚洲、非洲和欧洲部分区域的DOP,使得RAIM可用性达到99.0%以上。三系统组合导航中,GPS/Galileo/BDS三系统组合导航RAIM可用性最好,在全球陆地区域几乎都能达到99.5%以上,绝大部分区域可达到100%。 References) [1] LEE Y. Analysis of range and position comparison methods as a means to provide GPS integrity in the user receiver[C]∥Proceedings of the Annual Meeting of the Institute of Navigation. USA, 1986. [2] LEE Y. A new improved RAIM method based on the optimally weighted average solution (OWAS) under the assumption of a single fault[C]∥Proceedings of the 2006 National Technical Meeting of the Institute of Navigation. USA, 2001. [3] 刘瑞华,赵庆田, 吕小平, 等. “北斗区域导航系统”非精密进近导航性能分析[J]. 中国空间科学技术, 2015, 35(4): 53-59. LIU R H, ZHAO Q T , LYU X P, et al. Performance analysis for BeiDou regional navigation satellite system of NPA[J]. Chinese Space Science and Technology, 2015, 35(4): 53-59(in Chinese). [4] 陈忠贵, 帅平, 曲广吉. 现代卫星导航系统技术特点与发展趋势分析[J].中国科学:技术科学, 2009 (4): 686-695. CHEN Z G, SHUAI P, QU G J. The analyse of characteristic technique and development direction with the satellites navigation system[J]. Science China: Technological Sciences, 2009(4): 686-695(in Chinese). [5] 陈俊勇. GPS技术进展及其现代化[J]. 大地测量与地球动力学, 2010(3):1-4. CHEN J Y. On progess in technology and modernization of GPS[J]. Journal of Geodesy Geodynamics,2010(3):1-4(in Chinese). [6] URLICHICH Y, SUBBOTIN V, STUPAK G,et al. GLONASS modernization[J]. GPS World, 2011,22(11): 34-39. [7] ENE A. Further development of Galileo-GPS RAIM for vertical guidance[C]∥Proceedings of the ION GNSS. USA, 2006. [8] ENE A, BLANCH J, WALTER T. Galileo-GPS RAIM for vertical guidance[C]∥Proceedings of the ION NTM. USA, 2006. [9] MARTINEAU A, MACABIAU C, MABILLEAU M. GNSS RAIM assumptions for vertically guided approaches[C]∥ Proceedings of GNSS 2009, 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation. USA, 2009. [10] OBER P, HARRIMAN D. On the use of Multiconstellation-RAIM for aircraft approaches[C]∥Proceedings of ION-GNSS 2006, 2006: 2587-2596. [11] HEWITSON S, WANG J L. GNSS receiver autonomous integrity monitoring (RAIM) performance analysis[J]. GPS Solutions, 2006, 10(3): 155-170. [12] XU J Y, YANG Y X, LI J L,et al. Integrity analysis of COMPASS and other GNSS combined navigation[J]. Science China:Earth Sciences, 2013, 56(9): 1616-1622. [13] OCHIENG W, SAUER K, WALSH D,et al. GPS integrity and potential impact on aviation safety[J]. The Journal of Navigation, 2003, 56(1): 51-65. [14] 陈金平, 许其凤, 刘广军. GPS RAIM水平定位误差保护限值算法分析[J]. 测绘学院学报, 2001(S1): 1-3. CHEN J P, XU Q F, LIU G J. Analysis of different algorithms for GPS RAIM HPL[J]. Journal of Institute of Surveying and Mapping, 2001(S1): 1-3(in Chinese). .[15] 李国重, 李建文, 李军正,等. 基于圆概率误差的RAIM可用性算法研究[J].武汉大学学报信息科学版, 2011(4): 461-466. LI G Z, LI J W, LI J Z, et al. Research on availability algorithm based on circular error probable[J]. Geomatics and Information Science of Wuhan University, 2011(4): 461-466(in Chinese). [16] 中国卫星导航系统管理办公室. 北斗卫星导航系统空间信号接口控制文件2.0[OL]. 2013[2015-11-20].http//159.226.251.229. China′s satellite navigation system management office. BeiDou satellite navigatin system signal in space interface control document 2.0[OL]. 2013[2015-11-20].http∥159.226.251.229(in Chinese). [17] Galileo ICD. Galileo open service, signal in space interface control document (OS SIS ICD)[M]. Paris: European Space Agency/European GNSS Supervisory Authority,2008. (编辑:高珍) Multi-GNSS RAIM availability algorithms and analysis for precise approach JIANG Hu1,2,YUAN Yunbin1,*,WANG Haitao1,OU Jikun1,JIANG Zhenwei3 1.StateKeyLaboratoryofGeodesyandEarth′sDynamic,InstituteofGeodesyandGeophysics,ChineseAcademyofScience,Wuhan430077,China2.UniversityofChineseAcademyofSciences,Beijing100049,China3.BeijingSpaceInformationRelayandTransmissionTechnologyResearchCenter,Beijing100094,China With the continuous development of global navigation satellite system (GNSS), the combined multi-system receiver autonomous integrity monitoring(RAIM) has been an important topic based on BDS/GPS/GLONASS/Galileo.The algorithm of Multi-GNSS RAIM availability was proposed,and the availability of a combined multi-system RAIM based on simulated navigation ephemeris of BDS/Galileo and actual navigation ephemeris of GPS/GLONASS was analyzed in precise approach procedures. Results show that five geosynchronous orbit (GEO) satellites and three inclined geosynchronous orbits (IGSO) satellites from BDS make a great contribution to RAIM availability. The eight satellites improve the geometry structure of the constellation in the most parts of Asia, Africa and Europe,and promote RAIM availability greatly. In the Asia-Pacific region, the RAIM availability of BDS reaches 99.5%,higher than that of the other three navigation system at APV-I phase. In precise approach phases (APV-I, APV-II and CAT-I), the integrated BDS/GPS/ Galileo/GLONASS can meet the requirements of RAIM availability in a global scale. global navigation satellite system(GNSS); receiver autonomous integrity monitoring(RAIM); precise approach(PA); geosynchronous orbit(GEO); inclined geosynchronous orbits(IGSO);availability 10.16708/j.cnki.1000-758X.2016.0028 2015-12-25; 2016-01-27;录用日期:2016-02-24; 时间:2016-04-29 10:48:22 http:∥www.cnki.net/kcms/detail/11.1859.V.20160429.1048.001.html 973基金(2012CB825604);国家自然科学基金(41231064,41474029,41174015) 蒋虎(1988-),男,硕士研究生,hujiang@asch.whigg.ac.cn *通讯作者:袁运斌(1971-),男,研究员,yybgps@asch.whigg.ac.cn,主要研究方向为GNSS测量理论、方法技术与应用 蒋虎,袁运斌,王海涛,等.精密进近阶段的多系统GNSS组合RAIM可用性算法及分析[J].中国空间科学技术, 2016,36(3):32-40.JIANGH,YUANYB,WANGHT,etal.Multi-GNSSRAIMavailabilityalgorithmsandanalysisforpreciseapproach[J].ChineseSpaceScienceandTechnology, 2016,36(3):32-40(inChinese). P228.1 A http:∥zgkj.cast.cn 轨道;可用性












2 多系统组合RAIM可用性仿真


3 结束语



