顶夹组合式全自动移栽机的设计研究
2016-04-06张振国张宁宁吕全贵韩长杰许红军李昊坤白紫勋
张振国,张宁宁,吕全贵※,韩长杰,许红军,李昊坤,白紫勋
(1.新疆农业大学机械交通学院,乌鲁木齐 830052;2.新疆农业大学林学与园艺学院)
顶夹组合式全自动移栽机的设计研究
张振国1,张宁宁1,吕全贵1※,韩长杰1,许红军2,李昊坤1,白紫勋1
(1.新疆农业大学机械交通学院,乌鲁木齐 830052;2.新疆农业大学林学与园艺学院)
针对目前穴盘苗向大田移栽,人工移栽成本高、移栽周期长、成熟期不一致、不利于机械化收获等问题,对新疆生产建设兵团大面积种植的辣椒穴盘苗物料特性进行测试。根据种植的辣椒苗物料特性,设计了一种顶夹组合式穴盘苗全自动移栽机。文中主要介绍了全自动移栽机的取苗、运苗和投苗的过程,全自动移栽机的组成和工作原理及其关键部件的设计。所设计的全自动移栽机对新疆棉花、番茄和辣椒等大面积种植的经济作物机械式移栽有良好的推动作用,大大减少了农业对劳动力的需求,增加农民的经济收入,对新疆的农业经济发展具有十分重要的意义。
顶夹组合式;全自动;UG;取苗机构;移栽机
0 引言
新疆地处我国西北,寒冷干燥、无霜期短,不宜于早播。育苗移栽是解决这一问题的有效途径,提前育苗,人为地控制并延长植株开花结果的时期,可以有效地提高新疆的经济作物棉花、番茄和辣椒等农作物的产量,大幅度地增加农民的经济收入。
目前所使用的大部分全自动移栽机的移栽质量不稳定,通用性较差,自动化程度低,限制了育苗移栽技术的综合经济效益,无法达到预期的增产目标。
穴盘苗全自动移栽机能实现棉花、番茄和辣椒等穴盘苗移栽生产过程自动化程度,减轻穴盘苗全自动移栽作业的劳动强度,提高作物移栽质量和移栽成活率,进而推进我国农作物生产机械化和自动化的进程[1~12]。
本文以新疆种植的辣椒苗为对象,设计了一种顶夹组合式穴盘苗全自动移栽机。
根据疆农业的实际情况,选用新疆农民普遍使用的128(16×8)穴盘。所用约40天苗龄的辣椒穴盘苗为试验对象,对穴盘苗的基本形态特征株高、叶面展幅和茎粗等参数进行测量,以此对取苗机构中机械手的尺寸参数进行设定。通过多组辣椒穴盘苗的测定,穴盘苗壮苗的平均株高为187.6 mm,叶面展幅97.3 mm,茎粗2.55 mm,其叶片数一般为5~8片。
1 基本组成
基本结构如图1,由穴盘传送带(1)、压盘器(2)、顶杆(3)、机械爪(4)、送苗装置(5)、支撑杆支架(6)、动力杆(7)、抬升机构(8)、收盘盒(9)、穴盘苗运输带(10)、穴盘放置架(11)、控制系统(12)、动力系统(13)、覆土轮(14)、放苗器(15)、开沟器(16)、导苗漏斗(17)等组成。
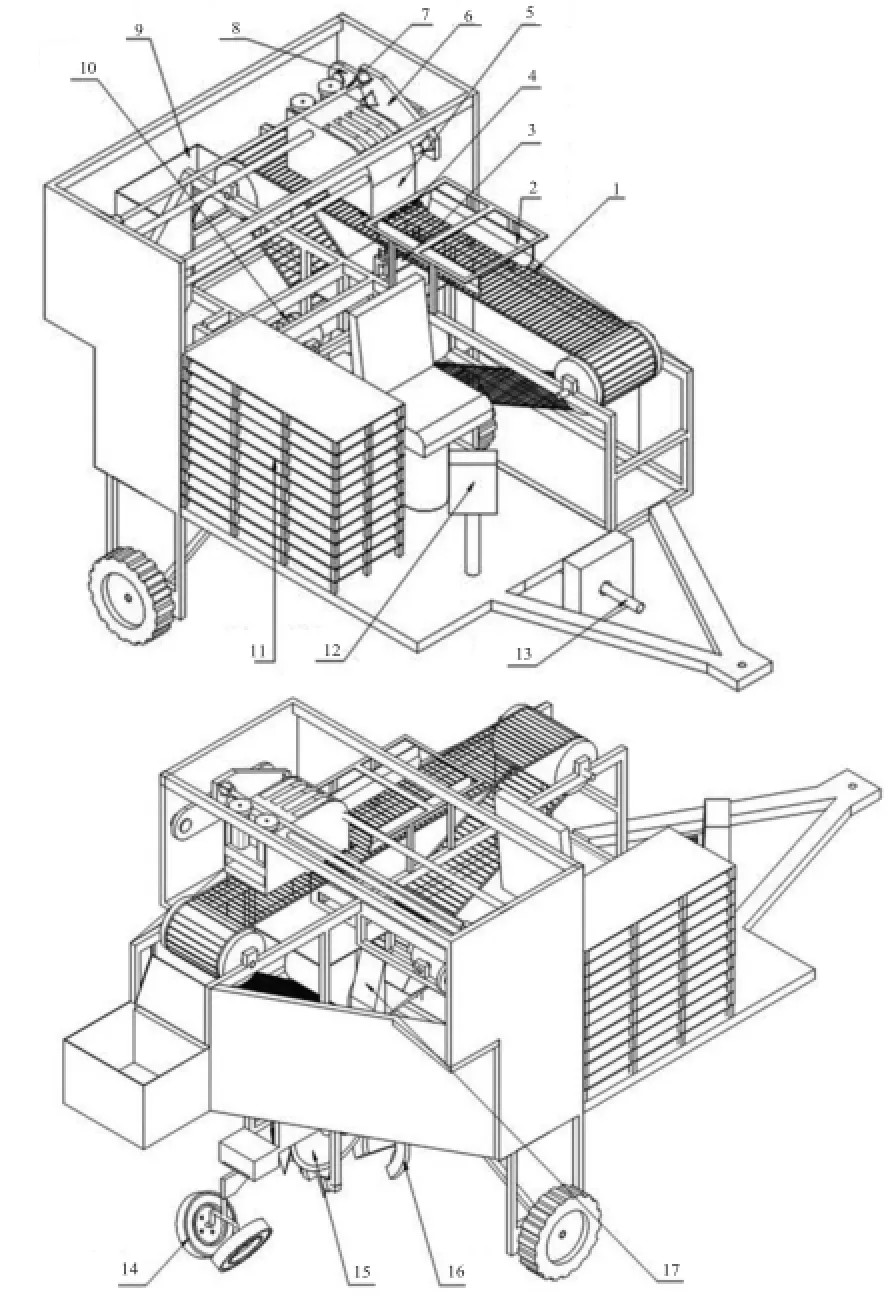
图1 全自动移栽机整体结构
2 工作原理
全自动移栽机的工作原理如下:将穴盘从穴盘放置架中取出,由人工放置于穴盘传送带上,运送穴盘至机械爪下方,由压盘器固定穴盘,经顶杆顶起穴盘中的苗,再由机械爪抓取被顶出穴盘的苗,由抬升机构抬升送苗装置将苗从穴盘中完全取出后,经过送苗装置将苗送至穴盘苗运输带上方。松开机械爪夹苗下落至穴盘苗运输带,由穴盘苗运输带运送至导苗漏斗并将苗导入放苗器中,经开沟器开沟,由放苗器将苗放入已开好的沟中,最后由覆土轮覆土,完成最终动作。空穴盘回收至收盘盒内。整机动力来源由动力系统提供,并且整机可以通过控制系统进行参数设置以应对不同环境,从而完成整个全自动移栽的过程。
3 关键部件的设计
3.1 取苗机械手的设计
3.1.1 机械手组成及工作原理
机械手的基本结构如图2,其主要结构为爪夹(1)、机械爪支撑架(2)、连杆(3)、动力分配块(4)、气缸(5)等机构组成。在移栽机的整个移栽过程中对苗的抓取和投放由机械手来完成,当顶杆将穴盘中的苗顶出一部分时,机械手中的气缸工作,推动动力分配块向前运动,动力分配块再推动与之相连的两根连杆。由顶杆将类似曲柄摇杆的爪夹将苗抓紧。当机械手带动苗移动到投放苗的位置时,气缸回程带动动力分配块向后移动,动力分配块再带动连杆,最后连杆将爪夹回拉,使爪夹松开,从而完成投苗动作。
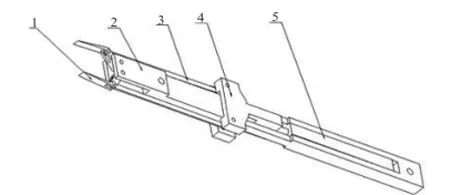
图2 机械手结构
3.1.2 机械手气缸行程计算
由穴盘苗参数可知穴盘苗基质的尺寸为上底面和下底面分别为30×30 mm和15×15 mm的倒梯形结构。机械手抓取位置为基质中部位置23×23 mm的截面由此计算出气缸的行程。由机械手抓取时状态与初始状态的抓取部分转动的角度差计算气缸的行程。
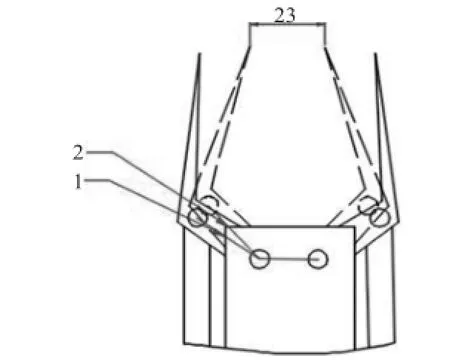
图3 机械手初始状态和抓取状态合图
如图3所示,实线为初始状态图,虚线为抓取状态图。图中线段1和线段2的长度为23.3 m。线段1与水平面的夹角为145°,线段2与水面的夹角为130°。线段1的水平长度为19.1 m、垂直长度为13.4 m。线段2的水平长度为15 m、垂直长度为17.3 m。
由上述数据计算气缸的行程:
线段1与线段2的上端点的水平距离为:

线段1与线段2的上端点的垂直距离为:

由勾股定理可得:

由此可以推出气缸的行程为5.24 mm。
3.2 取苗模块的基本组成及工作原理
取苗模块的基本结构如图4,其主要结构由抬升支撑气缸(1)、支撑板(2)、取苗模块支撑(3)、动力杆(4)、支撑杆(5)、动力轮(6)、取苗移动模块(7)、机械爪(8)等机构组成。
取苗模块上的机械手将苗抓紧,由支撑气缸顶起整个取苗模块,之前机械手抓紧已经被顶出部分的穴盘中的苗,在整个模块向斜右上方向移动时,将苗从穴盘中完全取出,这时的机械手抓紧苗带动苗随取苗模块一起移动。再由取苗模块上的伺服电动机启动带动动力轮转动,动力轮转动后带动整个取苗模块向左沿动力杆的方向移动到指定的位置后,机械手将苗投放,下方有传送带接住苗,进行下一步移栽,然后伺服电机反转,伺服电机带动动力轮反转,从而带动整个取苗模块沿动力杆反向移动回到取苗的位置,完成取苗模块的整个周期的动作。
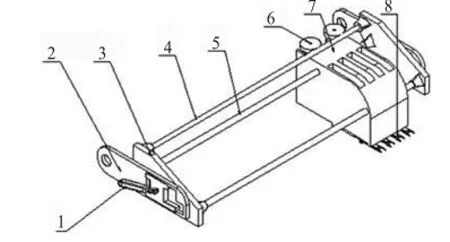
图4 取苗模块结构
3.3 夹顶组合式的取苗机构
移栽时由传送带带动将穴盘苗传送到机械手部位,顶杆顶出穴盘中的苗后,机械手由气缸带动完成抓夹的张开与闭合,从而抓取穴盘中的苗,后由电机带动沿动力杆移动到输送带位置对苗进行投放,输送带经导苗管将苗投入鸭嘴中,最后由鸭嘴完成移栽。
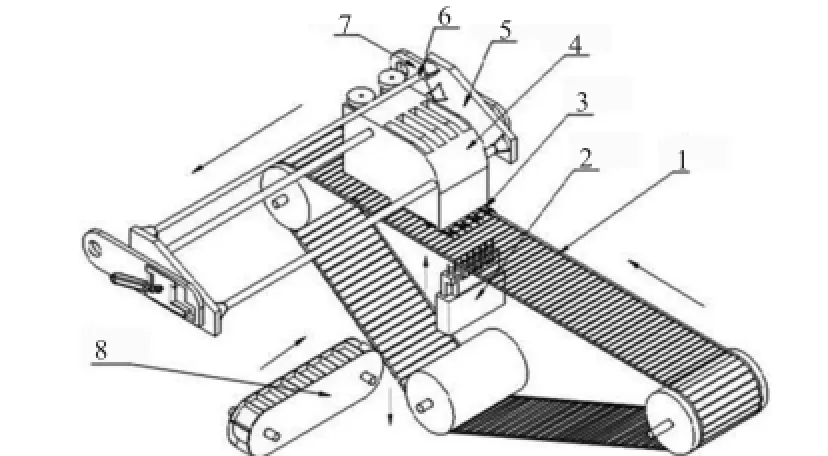
图5 全自动移栽机夹顶组合式取苗机构
4 抓顶组合式取苗机构中苗的力学分析
4.1 顶出苗时苗的力学分析
顶出设计是由于穴盘的底部有一个直径为7 m的孔,因此设计的顶杆直径为6 m,顶出时所需要力的大小由实验得出,见图6:
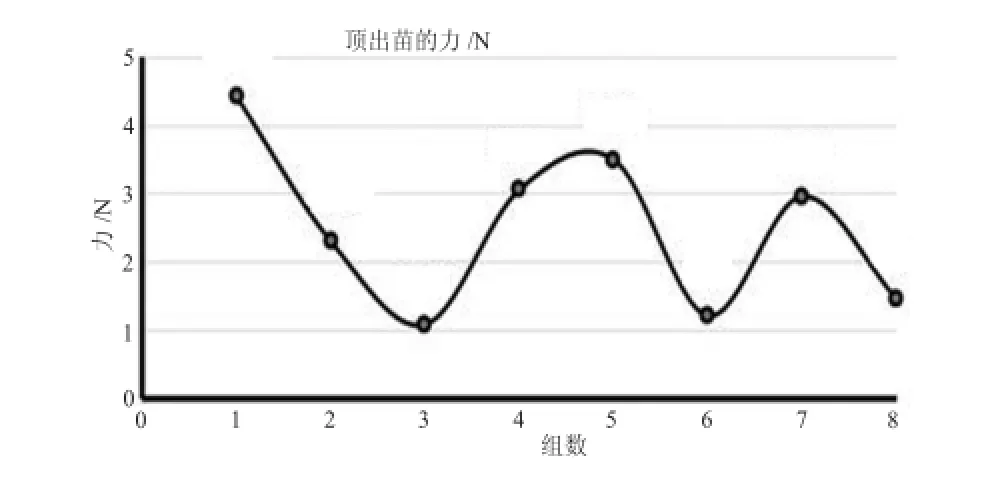
图6 顶杆顶出苗时所需的力
由图6可知顶杆将穴盘中的苗顶出时所需力在2.51 N左右,然而在实际的顶苗过程中,顶出不同的苗时,所对应的苗与穴盘的黏性是不同的,因此取最大顶出力,顶杆顶出力设计为5 N。
4.2 机械手抓取苗和基质时的力学分析
在机械手抓取被顶出的苗时,对45天的辣椒苗进行了基质和植株的质量测定,得出下表:
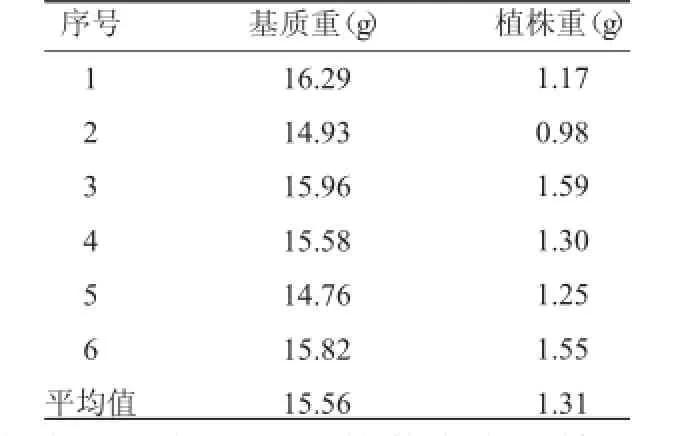
表1 苗的基质与植株的质量测量
由上表可以得出顶出的苗在水平情况下,基质与植株整体的重心是在基质当中,是不会导致顶出的苗倾倒。
最后对基质的受力进行测量,在受力多大时会导致机械手对苗的基质产生损伤,这里对基质进行了破坏性实验,在机械手所施加的力小于最小的基质破坏力的情况下是不会对苗的移栽造成二次伤害,因此得出下图:
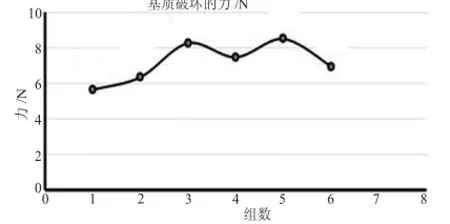
图7 苗的基质破坏性实验所需的力
由图7可知,苗的基质在受力为7.2 N时,基质会造成二次损伤,在实验时最小的破力的大小为5.64 N,因此将苗的最大受力设计为5 N,所以机械手的夹取力度最大为5 N。
5 结论
本文主要针对穴盘苗移栽技术设计了全自动移栽机,目前绝大多数的移栽机机械手的主要抓取对象为穴盘苗中苗的茎秆,但抓取茎秆时会对苗的茎杆造成一定的损伤,从而降低移栽的质量和穴盘苗的成活率。本文中所设计的全自动移栽机机械手抓取对象是穴盘中幼苗的基质,会减少对苗的损伤,保证了移栽质量和苗的成活率。
本文通过对全自动移栽机的设计,对新疆兵团的棉花、番茄和辣椒等经济作物大面积机械移栽具有良好的推动作用并且提高效率,从而大大的减少了对劳动力的需求,同时对整个新疆的农产品的发展具有重要的促进意义和作用。
[1]张振国.穴盘苗移栽机自动取苗装置的设计与仿真[D].石河子大学,2013.
[2]卢勇涛,李亚雄,刘洋,李斌,王涛.国内外移栽机及移栽技术现状分析[J].新疆农机化,2011(3):29~32.
[3]张若宇,坎杂,江英兰,李景彬,王丽红.农业机器人在新疆兵团农业生产中的应用前瞻[J].农机化研究,2006(9):29~32.
[4]赵红丽,卢玉文.新疆兵团农业现代化水平及影响因素分析[J].兵团党校学报,2011(6):54~60.
[5]刘俊浩.新疆兵团农业经济体制改革回顾与展望[J].石河子大学学报(哲学社会科学版),2008(6):10~13.
[6]姚勇.新中国开发新疆的特殊道路—新疆生产建设兵团[J].新疆大学学报(哲学人文社会科学版),2007(6):72~77.
[7]张冕,姬江涛,杜新武.国内外移栽机研究现状与展望[J].农业工程,2012(02):21~23.
[8]潘启明.国内外移栽机技术现状和发展趋势[J].安徽农业科学,2013(31):12478~12479+12496.
[9]刘磊,陈永成,张茜.兵团移栽技术的应用与发展概况[J].农机化研究,2008(9):240~243.
[10]于向涛,胡良龙,胡志超,张延化,计福来.我国旱地移栽机械概况与发展趋势[J].安徽农业科学,2012(1):614~616.
[11]冯青春,王秀,姜凯,周建军,张睿,马伟.花卉幼苗自动移栽机关键部件设计与试验[J].农业工程学报,2013(6):21~27.
[12]韩长杰,杨宛章,张学军,郭辉,尹文庆.穴盘苗移栽机自动取喂系统的设计与试验[J].农业工程学报,2013(8):51~61.
Design and Research on the Automatic Transplanting Machine of the Top Pinch Combined Type Plug Seedling
ZHANG Zhen-guo1,ZHANG Ning-ning1,LV Quan-gui1※,HANChang-jie1,XUHong-jun2,LIHao-kun1,BAI Zi-xun1
(1.Mechanical and Traffic College,Xinjiang Agricultural University,Urumqi,830052,China;2.College of Forestry and Horticulture, Xinjiang Agricultural University)
According to the present situation of Xinjiang production and Construction Corps large area planting pattern, seedling transplanting to artificial transplanting,high cost,long period and mature period of transplanting at the same time,is not conducive to agricultural mechanization harvest,statistical measurement of the planting of Xinjiang production and Construction Corps material characteristics of the large area.According to the material characteristics of tomato seedlings,a kind of top pinch combined type plug seedling full automatic transplanting machine was designed.This paper mainly introduces the process of the whole automatic transplanting machine,the process of seedling and seedling,the composing and working principle of the automatic transplanting machine,and the design of the key parts.The design of automatic transplanting machine of Xinjiang cotton,tomato,pepper and other economic cropsin a large area of transplanting machine hasa good role in promoting,greatly reducing the agricultural labor to labor demand and to increase the economic income of each farm workers,of Xinjiang'sagricultural economic development hasa very important significance.
Top clamp combination;Full automatic;UG;Seedling transplanting mechanism;Transplanting machine
1007-7782(2016)06-0016-04
10.13620/j.cnki.issn1007-7782.2016.06.005
S223.92
A
2016-12-02
新疆农业大学校前期资助课题(XJAU201409)
吕全贵