四象限探测器输出非均匀性分析与矫正
2016-03-20钱惟贤刘泽伟
张 骏,钱惟贤,刘泽伟
四象限探测器输出非均匀性分析与矫正
张 骏,钱惟贤,刘泽伟
(南京理工大学 电子工程与光电技术学院,江苏 南京 210094)
对四象限光电探测器系统的原理及其定位误差进行了分析,并提出了一种标定并修正其固有误差以及四象限非均匀性的方法。推导得出了入射光线偏移角度和输出电压的关系,并通过实验和计算得到了证实。为改善四象限探测器探测精度以及消除各项误差的影响提供了一种方法。
四象限光电探测器;目标定位;光斑偏移;定位误差
0 引言
四象限探测器具有灵敏度和位置分辨率高、光谱范围宽、体积小、响应快、动态范围宽等特点,因而广泛应用于激光准直、激光制导、目标定位及自动跟踪等精密光电检测系统中,通过定位目标光斑的中心位置来检测其位移量或角偏移量的大小[1]。四象限探测器的工作精度主要受周围环境因素、目标光斑大小、光斑能量分布、器件响应差异和系统噪声所带来的四象限不均匀性的影响,本文主要提出一种算法对四象限光电探测系统的非均匀性和固有误差进行标定和修正,并通过具体实验验证了该理论和方法的可行性[2]。
1 四象限探测器的工作原理
四象限探测器件的基本结构如图1所示,四象限光电探测器由4个形状相同、位置对称、面积相等且性能参数也基本相同的光敏探测区域构成,当有相应波长的入射光照射在探测器光敏面上时,探测器的各个区域将输出相应大小的电信号,通过对这4个输出电信号的计算处理,可以确定入射光点照射在感光面上的坐标位置[3]。
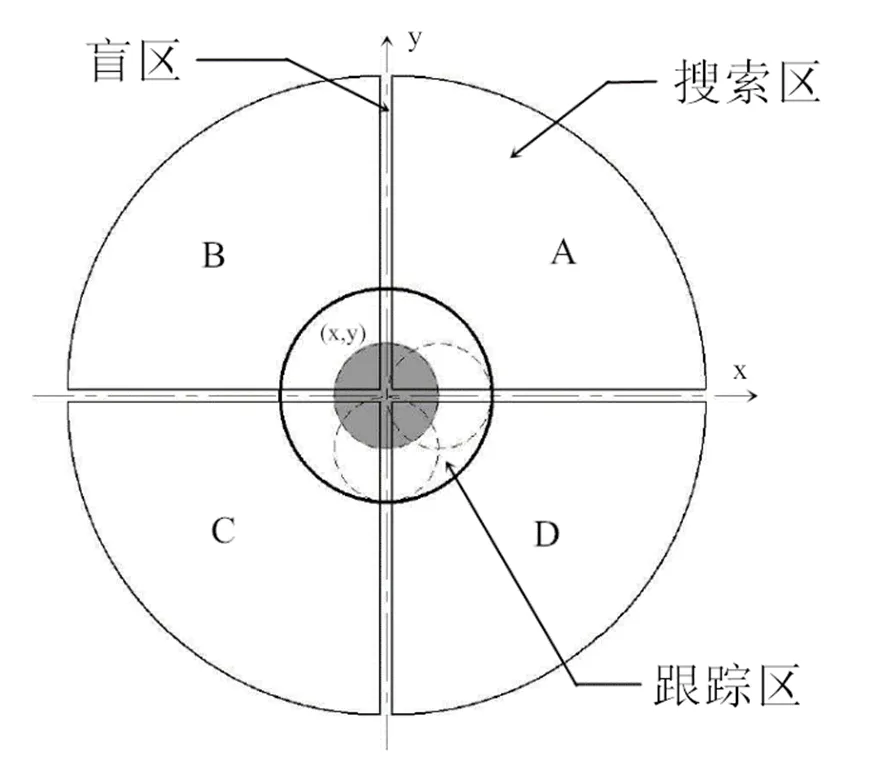
图1 四象限探测器光敏感应面
其中象限之间的间隔区域被称为“盲区”,工艺上要求将其做得越窄越好。盲区将4个光电二极管分为A、B、C、D四部分,探测器工作时,来自目标的入射光线经光学系统汇聚形成光斑,映射在光敏面上,形成半径为的圆形光斑,光斑中心坐标为(,)。光斑在四象限上各自投影的面积分别为a、b、c、d,投影的光斑在各象限阴极所产生的相应的光电流分别为1、2、3、4[4]。
由图1可知,只有当光斑位于四象限中心的一定区域内时,探测器的各象限皆能受到一定面积的光斑照射,此时输出信号通过计算可测出光斑中心在感应面上的坐标位置;而超出这一区域,则光斑全部落入某一个或某几个象限内,因而探测器只能测出目标所在象限的信息,而不能精确到坐标位置。因而,能输出目标具体坐标位置的内部区域为“跟踪区”,而只能输出目标所在象限信息的外围区域为“搜索区”[5]。
光斑在各象限所产生的电流与该象限截取的光斑面积有关,由于各象限的形状与性能基本相同,因而当光斑中心位于探测器的中心时,各象限截取的光斑面积相等,光生电流1、2、3、4都相等,此时目标光斑在感应面上的位置,即光斑在横、纵两个方向的偏移量可由和差法计算出[3]:
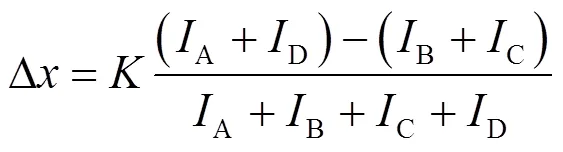
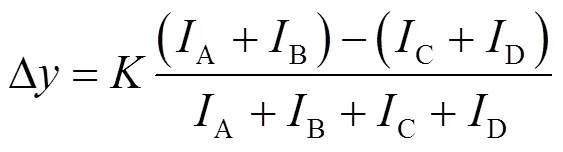
式中:D、D分别为目标光斑信号在轴、轴方向上的位移分量;为比例系数,是一个与探测器的大小有关的常量。
由于工作时4个象限所输出的是微弱的电流信号,不方便处理,因而须通过前置放大电路,输出相应的电压信号,再经过后续电路的算法处理得到光斑中心的偏移量信息。
本文所使用的电荷灵敏前置放大电路的基本原理如图2所示。
其中BFT862是一个低噪声高频结型场效应管,MAX4107是个低噪声宽带运算放大器,电容1的作用是隔直,实现输出与输入端的交流耦合。放大器的输出电压与输入电荷能量的关系可以表示为:
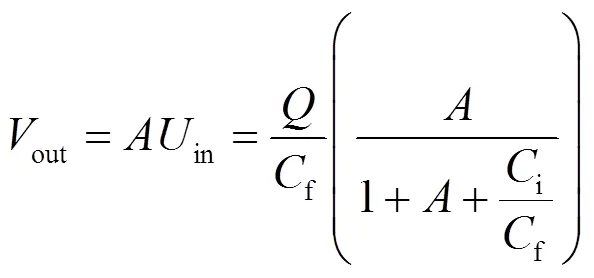
式中:Cf为反馈电容;Ci包扩了探测器的结电容、放大器的输入电容以及引线的分布电容,A为放大器增益。
由于1+(i/f)远小于放大器的增益,所以式(3)可以简化为:
由式(4)可以看出,放大器的输出电压out仅决定于反馈电容f与输入电荷的大小,故只要反馈电容的值稳定,则输出电压与输入的电荷信号将成正比关系[6]。
因而,光斑位置与探测器输出电压的关系可表示为:
式中:U、U分别表示和轴方向上的出位置信号电压。
2 探测器输出误差的原理分析与修正方法
通过理论研究和实验,总结并分析了以下导致探测器定位产生误差的主要原因,并提出了相应的修正该误差的方法。
2.1 背景光干扰及暗电流噪声造成的影响
在探测系统的噪声中,主要的噪声来源分别是工作环境中背景光的干扰、探测器的暗电流以及后端电路中的噪声干扰,这些因素的存在都会使得探测器输出的电流增加,从而降低探测系统的定位精度[5]。在实际的探测系统工作时,各象限输出的电流大小同时包含了其光敏面上激光光斑和背景光的光生电流这两部分,因而各象限实际输出的电流将大于理想值[7]。
目前普遍用于修正背景光干扰以及暗电流噪声的方法主要有:
1)针对系统中激光的波长和频率进行窄带滤波,并加装滤光片,以减小背景光功率噪声的影响;
2)提高信噪比,通常的做法是增强入射光的能量。但此方法的前提是入射的总体光强不能过大,以免对探测器造成损伤。
以上两种方法都难以对背景光和暗电流的影响进行定量的分析和消除。本文基于对探测系统中的暗电流及背景光干扰的研究,建立了描述其影响的数学模型,并提出了标定和修正背景光和暗电流这两种影响的方法。
基于前文所述的加减算法,并设探测器的各象限受到背景光照射所产生的光电流为BFi,各象限及其电路中暗电流噪声的大小为DKi,其中(=A, B, C, D),则由探测器各象限输出的光电流来计算光斑中心偏移量的表达式为:


而通常情况下,环境光强可以认为是均匀的,与此同时,各象限的暗电流大小主要与其所加偏压的大小有关,因而也可认为它在探测器各象限上的分布是均匀的。由此,各象限上由背景光和暗电流造成的光生电流可以表示为:
BFA=BFB=BFC=BFD=BF/4 (9)
DKA=DKB=DKC=DKD=DK/4 (10)
式中:BF表示整个探测器光敏面受到背景光生电流的总大小;DK为四路探测器的暗电流总大小。
因此可将式(7)和式(8)简化为:
由于电流的值均为正值,所以背景光的分母增加的数值一定大于分子所增加的值,造成和的数值偏小。因此,背景光的干扰会造成光斑定位的过程中,计算所得的坐标在数值上比实际中的坐标偏小。
如图3所示,假设背景光在探测器的总入射光强中所占比例分别为5%、10%、15%时,通过仿真可以得到探测器的定位计算曲线与相应的误差曲线。可以看出,随着背景光在总入射光强中所占的比例越来越强,则定位计算在未经优化时的测量误差将会越来越大。
2.2 各象限光学响应率及放大电路非均匀性的影响
理想的四象限探测器,当入射光的能量均匀分布于光敏面时,各象限输出的光电流的幅值应当互相一致,并且相同的光生电流经过放大电路后的输出电压也应当一致。但实际中由于制造工艺、半导体材料的掺杂水平、掩膜误差等情况的影响,往往输出值并不能达到真正的相等,这也会影响系统的定位精度[8]。而这种象限间的不均匀程度越大,探测器的定位精度也会随之减小。若定义各象限的电路增益为A,各象限的实际增益均匀度为,则两者的表达式应为:
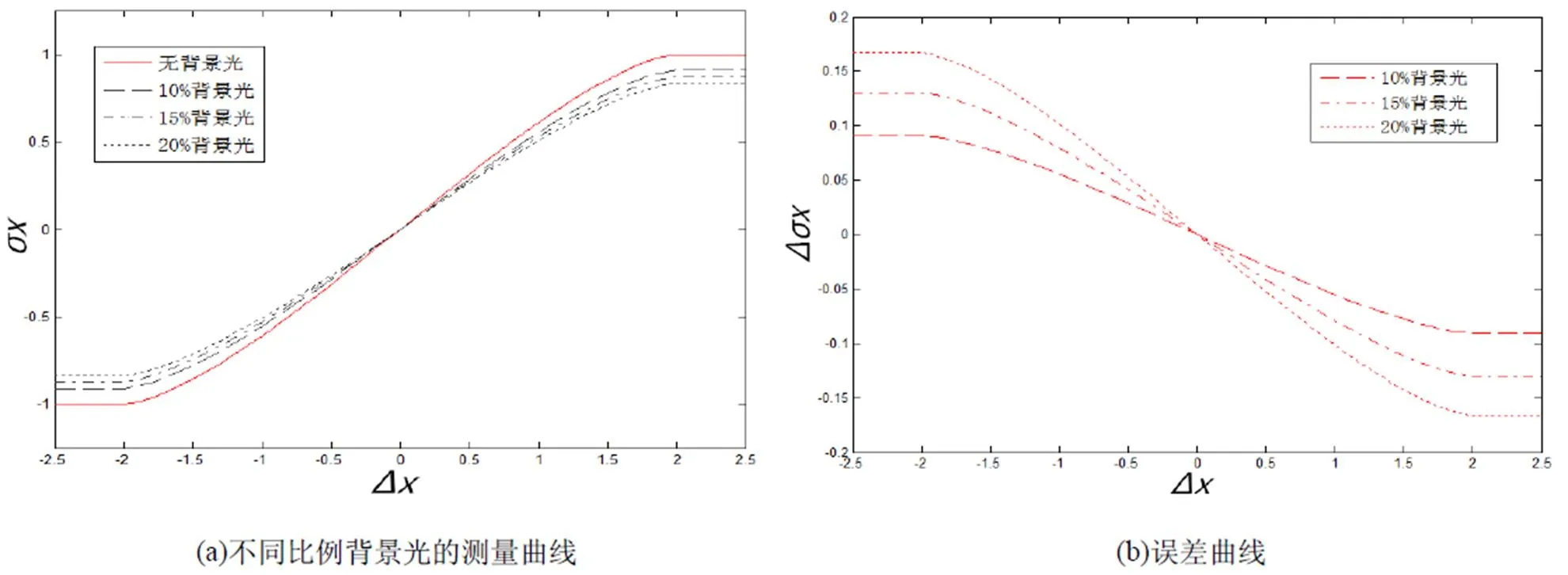
图3 不同比例的背景光对四象限探测器定位精度的影响
将各象限的电路增益A及实际增益均匀度带入定位算法的计算公式中,则其表达式应为:


可见,当象限间的光敏响应程度比较一致时,可以便捷地计算出光斑中心的坐标方位,而当响应均匀度不一致时,则会对定位计算造成影响,降低探测器的定位精度。假设现有一四象限探测器,其第一象限的响应率最强,即A=1,其余3个象限的响应均匀度分别以5%递减,由式(15)可以仿真得出象限间响应不均匀时对定位算法的影响,如图4。
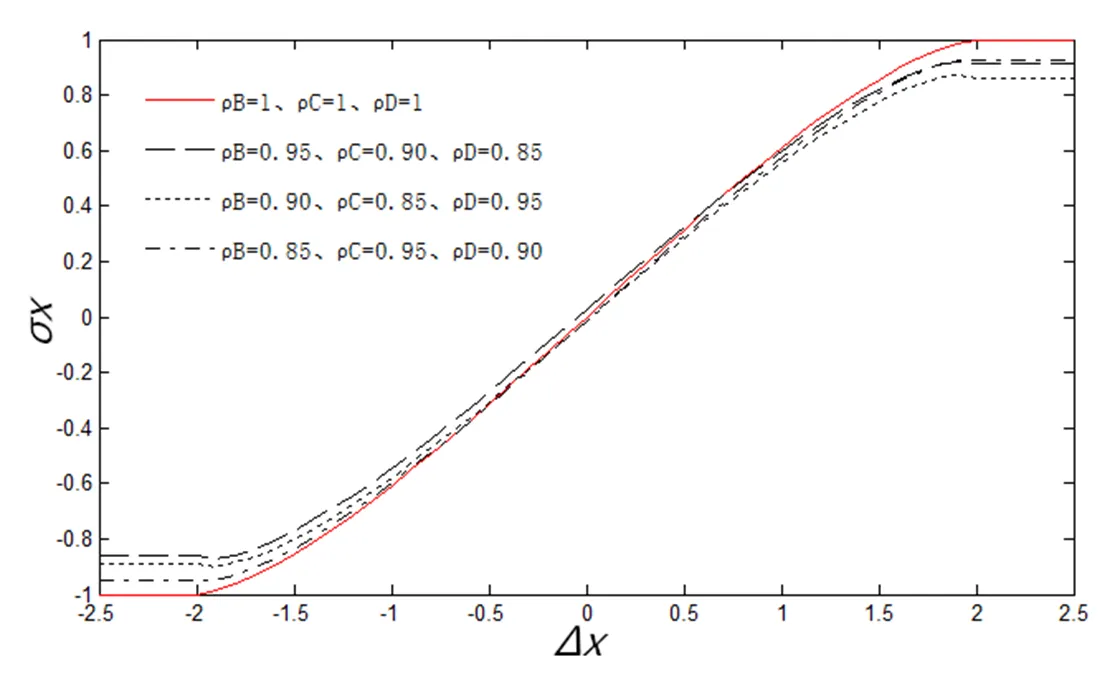
图4 各象限响应均匀度不同时探测器定位的偏差
可以看出,象限间响应度的不均匀虽然对探测器线性范围的影响不大,对探测精度有较大的影响,而且对于实际的探测器,各象限的响应均匀的均为未知且无规律,若不对此进行修正,则难以进一步提升探测器的精度和可靠性。
因此,在探测器开始探测和定位之前,应首先对探测器的暗电流和工作环境中的背景光情况以及探测器的响应均匀度进行标定,以便于在之后的定位计算中运用优化算法对计算结果进行修正。
2.3 探测器安装误差造成的影响
探测器的安装误差,其来源可能是探测器在安装时未能完全对准或有所倾斜及位移,早晨探测器在测量过程中会有一定的固定误差存在,这种误差可以通过在实验前对探测器的标定和观察加以修正,但要达到完全的修正则比较困难。
2.4 目标光源的均匀程度及形状,
目标光源的均匀性越好,形状越规则,探测精度越高。光源的形状与均匀性与探测器系统的整体设计方案有关,主要决定于如入射和出射的光学系统的设计与工艺水平。
3 均匀性及噪声修正算法与实验验证
3.1 修正算法与相应的标定过程
传统的标定四象限探测器的方法,是对探测器的整体测量情况经行标定,将探测器的输出与实际偏移量之间拟合出一个线性关系,用于修正探测器的定位误差。但是此方法只适用于静态工作下的探测器,而且由于缺少原理上的分析,因此修正的误差也较大。
对此,本文基于以上优化算法,设计了能够更加具体而精确地对四象限探测器进行标定的方法。如前文所述,若要提高四象限探测器的测量精度,需要对所使用探测器的以下几方面进行标定:各象限的实际光响应度R、各象限对应电路的增益A及其实际增益均匀度、探测器工作时的暗电流DKi、探测器在工作环境中接收到的背景光能量BFi。在实际探测系统中,若入射到探测器各象限的信号光能量为E,则相应象限的输出电压U可以表示为:

由此,本文设计了更加详细和精确的标定方法,其步骤如下:
1)首先,将探测器安装于暗室无光的环境下,此时可认为探测系统中既没有信号光也无背景光,则此时各象限的输出电压仅由暗电流噪声产生:

由前文可知,各象限中的暗电流噪声可以认为均匀的,因而此时可以标定出各象限电路的增益均匀程度,并由此得到各象限的增益校正系数-1,由式(14)可知:
A-1×A×A=B-1×B×B=C-1×C×C=D-1×D×D(19)
此时记录下各象限的增益校正系数-1和暗电流产生的输出电压DKi。
2)打开目标光源,但不加装探测器的光学镜头,使入射光斑能够均匀照射在各象限上,此时可认为探测器各象限都只受到能量相同的信号光源的照射,因而各象限的输出电压为:
U=×A[R×E+DKi]=×AR×E+DKi(20)
此时定量地改变入射光信号的强度,则对每个象限,可以根据输出电压的变化情况标定出该象限的实际光响应度,即:
3)将探测系统安装于工作环境中,安装探测器光学镜头,但不打开光源,此时可认为探测器的各象限都只受到能量均匀的背景光照射,因而各象限的输出电压只由背景光和暗电流所产生:

由上式可知,此时将各象限的输出电压减去对应的暗电流电压,即可标定出探测系统中背景光的干扰情况BFi。
本文基于以上算法及标定过程,在实际探测时,能够根据模型和标定的数据,将探测器各象限输出的电压信号还原为入射光的能量信号:

并由此代入加减算法中进行定位计算以提高探测器测量的精度:
3.2 实验验证与分析
仿真是在理论的层面上对四象限探测系统的性能特点进行研究,而如要验证探测器和定位算法在实际应用中的探测及定位效果,则仍需结合实验并对其结果进行分析。本文基于前文设计并搭建的探测器及实验系统,测试了探测器整体的定位精度,并利用前文提出的两种定位修正算法,成功改良了探测器的定位精度和探测范围。
实验中,控制安装有探测器的电机转台以0.1°为间隔进行水平旋转,在以原点为中心的正负6°以内的每个坐标位置进行测量,采集并保存下各探测位置下的各象限输出信号;之后根据前文所述的均匀性及噪声修正算法,对探测器的各象限输出数据进行修正,将各象限输出的电压信号还原为入射光强的信号,然后再运用能量修正算法,结合定位计算的公式,计算得到目标位置信息并输出到电脑,并与实际偏移量进行对比。
如图5为实验中经过算法修正前后的测量结果,其中圆点为算法修正之前探测器在各个测量点的计算值,而“×”点为经过算法修正后的测量值,可见,经过算法修正,探测器的测量精度和线性范围有了明显的提高。

图5 经过算法修正前后的输出数据与实际偏移量的关系
如图6为经过算法优化前后的测量误差图,其中的圆点和“×”点轨迹分别为经过算法修正前后的测量误差值,可见,经过算法修正后的探测器误差,由之前的1.4°降低到了0.3°之内,说明探测器的测量精度有了明显的提高。从而可以证明本文所提出的对探测器经行标定和修正的算法具有较好的可行性和实用性,能够用于改善基于四象限探测器的光电定位系统。
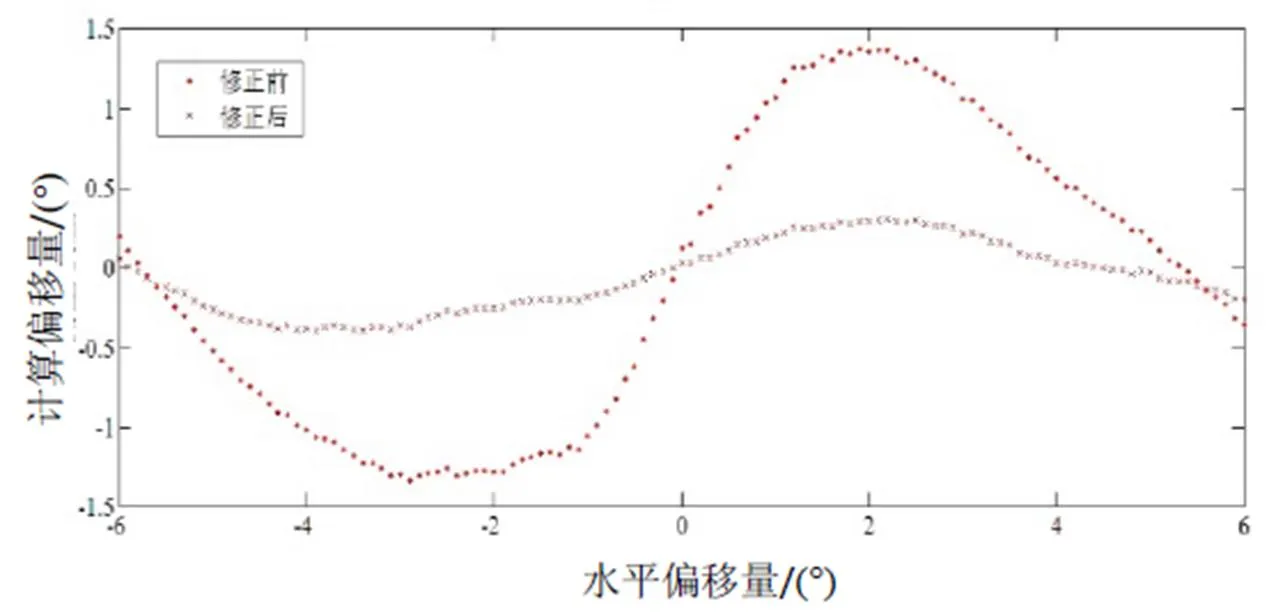
图6 经过算法优化前后的探测器输出误差
3.3 实验误差分析
结合本文的探测系统与实验中发现的问题,对实验结果出现的误差进行了分析,认为在经过修正算法的处理之后,探测器仍旧存在的误差主要源于以下几点:
1)探测系统元器件稳定性。探测器的元件稳定性主要包括了激光发射模块中的激光器稳定性,探测器中的电阻、电容以及芯片的稳定性,这些对于探测系统的测量精度和探测过程中的测量稳定都有至关重要的作用。
2)电路的干扰。在实验系统中,虽有滤光片可以防止其他波段的背景光进入探测器,但仍可能会受到一些与探测波长相近的背景光的干扰,这些干扰可能是在实验过程中稳定存在的,也可能是在某些时段里突然出现的。目前比较通用的做法是采用带通滤波器将这些与目标信号的频率相差较大的干扰信号滤除,但对于一些和目标信号的频率相近的干扰信号,则难以起到滤波的作用。
3)光学误差。激光发射器和探测器的两组光学镜头,在设计和加工时所产生的误差,会直接影响入射光在光敏表面所形成的光斑形状以及光强分布,因而可能会在很大程度上影响探测器的测量精度[9-10]。
4)光源能量的不均匀分布。目前针对四象限探测器的定位算法通常都是基于光斑能量的均匀分布情况,也就是认为探测器靶面上的光斑面积内各处光强都相同,然而这只是一种理想情况,对于实际中的探测器光斑,其能量的分布总是存在一些不同程度的非均匀,有时对于这种非均匀,一方面可以定性地分析出其形成原理,例如高斯分布等,但另一些由光学误差造成的能量分布不均匀则难以被定量地检测和分析,有待接下来的研究已解决。
4 结论
随着四象限探测器的广泛应用与研究,其四个象限的非均匀性已经有了一定的改善,再加上镜头前加装滤光片以及对信号的处理,可以在一定程度上有效避免背景光的干扰,但硬件电路的噪声以及安装和加工时工艺上的误差等因素,还是会对利用四象限探测器定位造成影响。本文通过原理分析与算法推导,得到了探测系统中入射光信号和探测器输出信号间的关系,并提出了一种标定探测器误差参数的方法,进而能够对实验数据进行修正从而提高探测器的定位精度。另外,通过实验和对其结果的分析,验证了文中提出的修正算法和标定方法的可行性,为提高四象限探测器的定位精度提供了理论依据和实用方法。
[1] 赵馨, 佟首峰, 姜会林. 四象限探测器的特性测试[J]. 光学精密工程, 2010, 18(10): 2164-2170.
ZHAO Xin, TONG Shoufeng, JIANG Huilin. Experimental testing on characteristics of four-quadrant detector[J]., 2010, 18(10): 2164-2170.
[2] 安毓英, 曾晓东. 光电探测原理[M]. 西安: 西安电子科技大学出版社, 2004.
SONG Yuying, ZENG Xiaodong.[M]. Xi’an: Xidian University Press.
[3] 余峰, 何烨, 李松, 等. 四象限光电检测系统的定位算法研究及改进[J]. 应用光学, 2008, 29(4): 493-497.
YU Feng, HE Ye, LI Song, et al. Improvement of positioning algorithm for four-quadrant optoelectronic detection system[J]., 2008, 29(4): 493-497.
[4] 路静. 关于四象限探测器确定光斑位置的研究[J]. 科技风, 2009(19): 224-225.
LU Jing. Study on determination of spot position of four quadrant detector[J]., 2009(19): 224-225.
[5] 吕生强. 四象限探测器的激光探测与定位研究[D]. 南京: 南京理工大学, 2008.
LV Shengqiang. Research on laser detection and localization of four quadrant detector[D]. Nanjing: Nanjing University of Science & Technology, 2008.
[6] 徐伟, 陈钱, 顾国华, 等. 用于APD激光探测的电荷灵敏前置放大器设计[J]. 激光与红外, 2011, 41(1): 27-30.
XU Wei, CHEN Qian, GU Guohua, et al. Charge sensitive preamplifier design for APD detection system of laser pulse[J]., 2011, 41(1): 27-30.
[7] 王芳. 雪崩光电二极管的噪声测试及应用研究[D]. 西安: 西安电子科技大学, 2012.
WANG Fang. Research on the Measurement and Application of Avalanche Photodiodes Noise[D]. Xi’an: Xidian University, 2012.
[8] 庄继胜, 魏建华. CO2激光制导用光伏碲镉汞四象限探测器组件[J]. 红外技术, 1996, 18(4): 12-14.
ZHUANG Jisheng, WEI Jianhua. The CO2laser guided by four quadrant photovoltaic HgCdTe detector assembly[J]., 1996, 18(4): 12-14.
[9] 陈梦苇. 基于象限探测器的光斑中心定位算法研究[D]. 武汉: 武汉理工大学, 2012.
CHEN Mengwei. Research on Spot Center Positioning Algorithms For Quadrant Detector[D]. Wuhan: Wuhan University of Technology,2012.
[10] 杨翠, 邹建, 刘得志. 四象限光电探测器定位误差分析[J]. 传感器与微系统, 2009, 28(5): 49-51.
YANG Cui, ZOU Jian, LIU Dezhi. Positioning error analysis is off our quadrant detector[J]., 2009, 28(5): 49-51.
Analysis and Correction of the Output Non-uniformity of Four Quadrant Detector
ZHANG Jun,QIAN Weixian,LIU Zewei
(,,210094,)
In this paper, the principle and the positioning error of the four quadrant photoelectric detector system are analyzed, and a new method for correcting the errors and correcting the non-uniformity of the four quadrant is presented. The relationship between the angular offset of incident light and the output voltage is deduced, and which is validated by experiment and calculation. In order to improve the detection accuracy of the four quadrant detector and eliminate the influence of various errors, a method is provided.
four-quadrant detector,target location,spot offset,positioning error
TN215
A
1001-8891(2016)07-0565-06
2015-10-29;
2016-04-18.
张骏(1990-),男,博士研究生,研究方向:光电探测与图像工程。
