自定义窗口的红外成像系统设计
2016-03-20王明昌樊养余
王明昌,樊养余,王 新
自定义窗口的红外成像系统设计
王明昌1,2,樊养余1,王 新3
(1.西北工业大学电子信息学院,陕西 西安 710072;2.中国空空导弹研究院,河南 洛阳 471009;3.火箭军驻郑州地区军事代表室,河南 郑州 450000)
红外焦平面探测器已经迅速成为红外成像领域的主流器件。针对某些红外跟踪装置模拟器需要使用诸如320×256、128×128、64×64等多种像元数的特殊要求,系统通过利用探测器自定义窗口工作模式的功能来满足该需求。探测器偏置电压由高精度电压参考源实现,外围电路采用低噪声设计技术,输入输出的数字信号均进行光电隔离。系统以FPGA为核心,实现了探测器基本时序控制、窗口模式设置、数字视频接口、RS422接口、模数转换和视频显示等功能,完成了自适应非均匀性校正、自动盲元剔除、图像增强和灰度拉伸映射等算法,可以同时满足观测和算法验证等多种需求。
红外成像;自定义窗口;FPGA;NUC
0 引言
当前,红外焦平面探测器技术日益成熟,广泛应用于对空、对地等军事领域[1-2]。探测器常用的窗口模式为320×256、320×240和256×256,但在一些特殊的应用中,如红外跟踪装置模拟器,要求既能够使用这些常用的模式,又能够使用诸如128×128、64×64等窗口模式并实时成像。本文提出了针对这种应用需求的红外成像系统设计方案。
1 探测器简介
探测器选用法国Sofradir公司的HgCdTe探测器,工作波段为3.7~4.8mm,像元数为320×256,像元尺寸为30mm×30mm,斯特林制冷方式,NETD约为15mK。探测器的电气信号接口包括模拟信号和数字信号,如图1所示。
1.1 模拟信号
探测器模拟信号包括模拟电源、数字电源、偏置电压、传感器接口和模拟输出接口。模拟电源、数字电源和偏置电压的要求见表1。
探测器有两组温度传感器接口(DTA1、DTK1)和(DTA2、DTK2),一路用于探测器制冷机判断内部制冷情况,一路用于成像系统判断探测器是否完成制冷。DTA为传感器正极,DTK为传感器负极,DTA需要接25mA的电流源。OUTPUT1~OUTPUT4是探测器完成光电转换后输出的红外图像模拟信号。
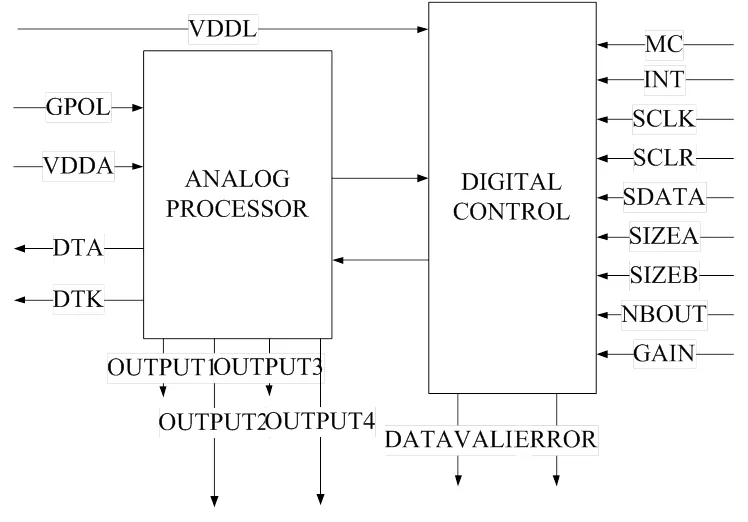
图1 探测器电气接口示意图
1.2 数字信号
探测器数字信号包括:MC(工作时钟),是外部输入给探测器的时钟信号;INT(积分时间信号),用来确定探测器的积分时间(高电平有效);DATAVALID(数据有效信号),表示探测器当前输出的模拟信号是否有效,信号为高电平时说明探测器输出的模拟信号为实际的红外图像信号;NBOUT(输出模式选择信号),为高电平时表示探测器通过OUTPUT1~OUTPUT4四路信号并行输出(缺省模式),为低电平时表示探测器仅通过OUTPUT1进行输出;增益模式选择信号(GAIN),为高电平时探测器等效电容为2.1pF(缺省模式),为低电平时探测器等效电容为0.7pF;窗口模式设置信号,包括SIZEA、SIZEB、SCLK、SCLR、SDATA和ERROR等。
2 成像系统设计
2.1 系统总体设计
红外成像系统由光学、电路、软件和结构等部分组成[3],本文主要介绍电路和软件方面的设计。
成像电路是一个典型的模数混合电路,包括红外探测器、偏置电路、电源和图像处理等电路。探测器对电源和偏置电压噪声性能要求很高,电源噪声较大时,图像上会明显的表现出各种噪声点或者斜条纹,所以电源和偏置电压的品质直接影响图像的质量。
软件主要包括非均匀性校正、自动盲元剔除、图像增强和灰度拉伸映射等算法的实现,主要目的是为了提高图像质量和改善人眼观测的效果。
系统以FPGA为核心实现各种功能,基本工作流程为:上电后,FPGA从FLASH中读取两点校正系数、盲元列表等参数并存储在与其相连的SDRAM中;FPGA检测到探测器制冷完成后,系统向探测器提供电源和偏置电压;FPGA向探测器(缺省工作在320×256模式)发送工作时钟、积分时间等信号;FPGA检测到探测器输出的数据有效信号为高电平时,启动模数转换芯片开始工作,将OUTPUT1~OUTPUT4等引脚输出的模拟信号转换为数字信号,并完成非均匀性校正、盲元替换、图像增强和灰度拉伸映射等算法;FPGA通过RS422接口接收来自上位机的指令,完成自定义窗口模式切换等功能。
2.2 硬件设计
成像系统硬件主要组成如图2所示,包括二次电源单元、制冷机电源滤波单元、信号预处理及转换单元、探测器接口及图像处理单元。
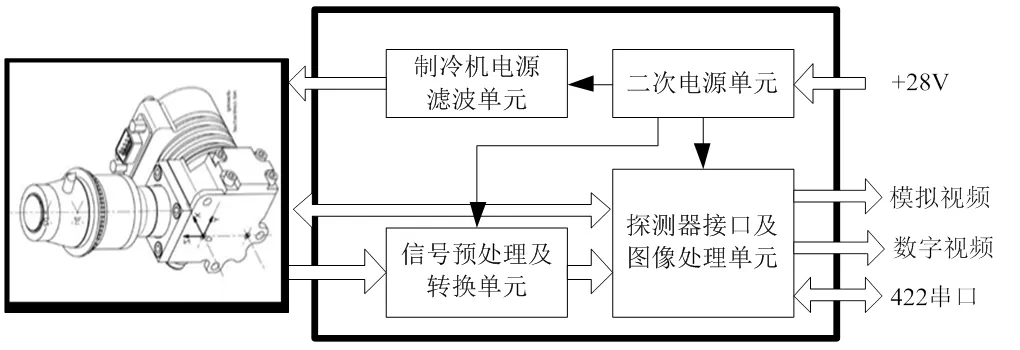
图2 成像系统组成框图
2.2.1 二次电源单元
该单元将外部输入的+28V电源转换为探测器所需的VDDA、VDDL以及制冷机所需的+24V电源。探测器对电源要求很高,对于数字+5V和模拟+5V电源,电流较大,采用两个低噪声的三端稳压器LT1963-5 V实现,其10Hz~100kHz的RMS噪声为20mV,能够满足使用要求[4]。由于+28V到+5V的压降过大,所以先使用DC-DC隔离电源模块HSA28S8将+28V转为+8V后再给LT1963-5V供电。+24V电源通过DC-DC隔离电源模块HSA28S24由28V转换得到。
2.2.2 制冷机电源滤波单元
该单元对+24V电源和探测器的一对DTA、DTK信号进行滤波后送给制冷机,以保证制冷机正常工作,同时隔离制冷电机对成像系统的干扰。

表1 探测器电源和偏置电压要求
2.2.3 信号预处理及转换单元
该单元将探测器输出的模拟信号进行调理后完成模数转换,选用AD公司的AD9240芯片。该芯片工作时序如图3所示,使用+5V单电源供电,最大采样率为10MHz,转换精度为14位,带宽为90dB,具有良好的低噪声性能,能够满足系统的要求。
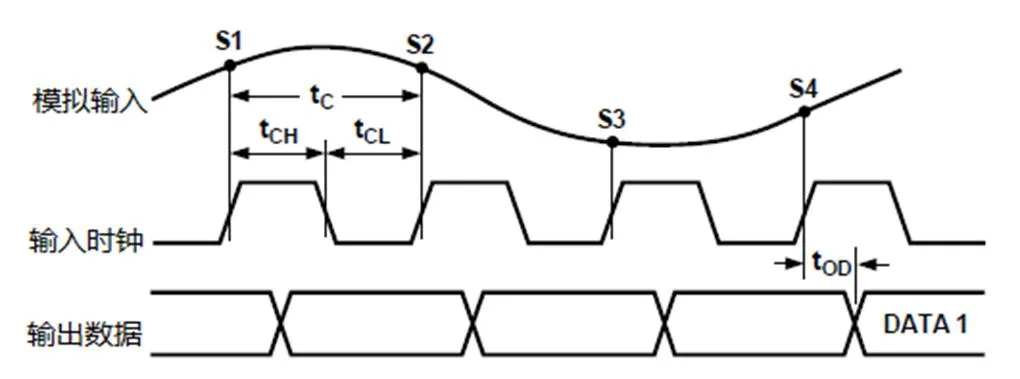
图3 AD9240工作时序图
2.2.4 探测器接口及图像处理单元
该单元是整个硬件的核心,包括探测器接口、时序控制和显示电路等部分。
2.2.4.1 探测器接口部分
探测器接口部分提供探测器所需的偏置电压。偏置电压允许的波动范围在±0.005V之间,普通的线性电源无法满足要求,采用高精度电压参考源REF192并使用精密电阻分压的方式来实现。为了避免数字信号对探测器模拟信号产生干扰,对MC、INT、DATAVALID、SIZEA、SIZEB、SCLK、SCLR、SDATA和ERROR等信号进行了光电隔离,隔离芯片采用HCPL-0630型高速光耦。
2.2.4.2 时序控制部分
时序控制部分主要由现场可编程逻辑器件实现[5],选用Xilinx公司的XC5VFX70T芯片,FPGA对外的接口关系如图4所示。Flash是用来存储非均匀性校正系数、盲元列表等信息,系统上电后,校正系数、盲元列表等从FLASH中读入到SDRAM存储器中,用于非均匀性校正和盲元替换。
1)基本时序控制
探测器制冷完成后,FPGA产生探测器工作所需的工作时钟和积分时间信号,接收探测器输出的数据有效指示信号,时序如图5所示。积分时间信号为高电平时探测器工作在积分状态,其下降沿必须同时钟信号上升沿对齐,Ncol为列数,Nrow为行数。探测器输出图像的帧频通过积分时间信号的周期时间来确定,系统可以接收上位机发来的指令来改变探测器工作的帧频,例如320×256模式时帧频为50Hz,128×128模式时帧频为100Hz。
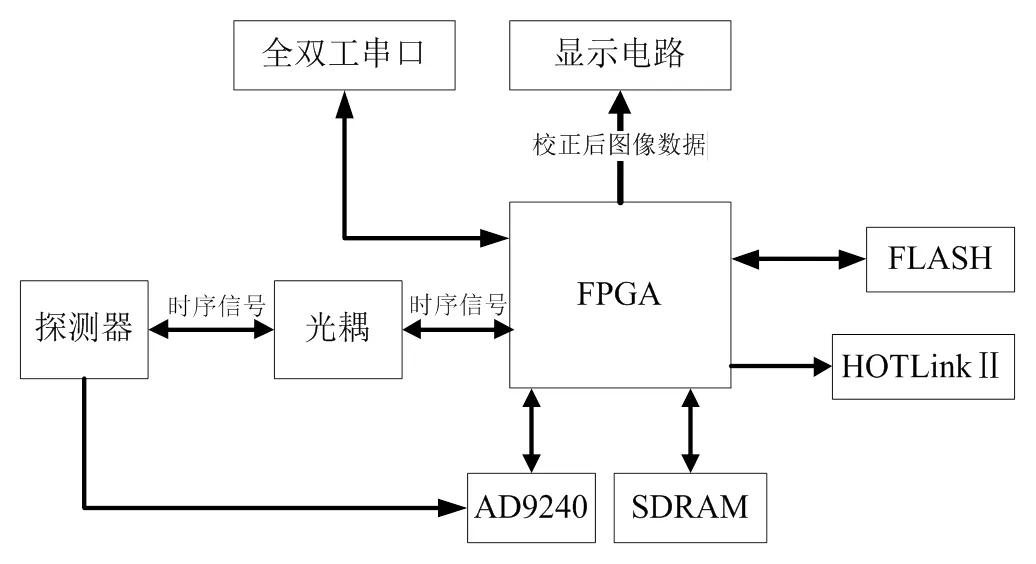
图4 FPGA对外接口框图
2)窗口模式设置
探测器使用SIZEA、SIZEB引脚的不同组合来对窗口模式进行设置:SIZEA、SIZEB信号与窗口模式的对应关系为:(1,1),320×256模式;(1,0),320×240模式;(0,1),256×256模式;(0,0),320×256范围内的自定义窗口模式。
SCLR、SDATA和SCLK信号用来对探测器自定义窗口模式进行必要的配置:SCLR复位记录窗口坐标信息的计数器,SDATA传送窗口坐标位置的相关信息,SCLK是最大频率为10MHz的时钟信号。自定义窗口模式的设置过程为:
①在固定窗口模式下(即320×256、320×240和256×256模式中的任意一种),探测器要至少输出1帧图像;
②在SCLK的第1个上升沿,将SCLR设置为高电平,保持一个SCLK周期后,再置为低电平;
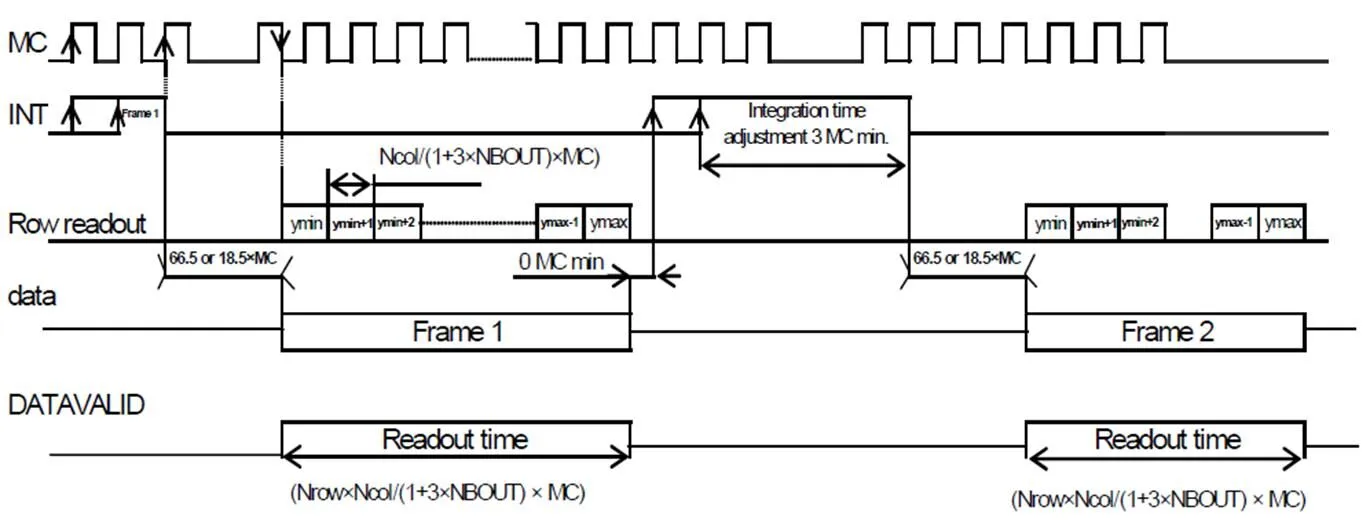
图5 探测器基本工作时序
③将SIZEA、SIZEB设置为自定义窗口模式,即(0,0);
④发送SDATA数据序列,该序列必须在DATAVALID信号下降沿和INT信号的上升沿之间进行发送;
⑤检测ERROR信号,如果为低电平,表明已设置成功;如果为高电平,表明设置失败,需要重新进行设置。
探测器焦平面坐标系定义如图6所示,假设自定义窗口是由、两点确定的矩形窗口,两点的坐标分别为(X,Y),(X,Y)。进行窗口模式设置时,假设点的数据为MIN、MIN,点的数据为MAX、MAX,则在方向,Y=MIN(0≤MIN≤255),Y=MAX(MIN≤MAX≤255)。在方向,对于一路输出模式,X=MIN(MIN=4,0≤≤64);X=MAX(MIN+64≤MAX≤319);对于四路输出模式,X=4×MIN(0≤MIN≤64);X=4×MAX-1(MIN+16≤MAX≤80)。
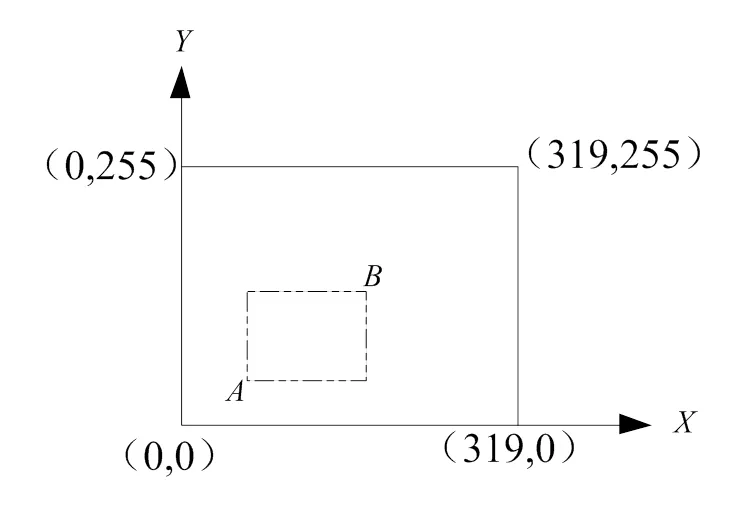
图6 探测器坐标系定义
窗口坐标序列的传送顺序为MIN,MAX,MIN和MAX,每个坐标值按照先高位后低位的顺序进行发送。MIN和MAX分别为8bit;探测器为四路输出时,MIN和MAX分别为7bit;为一路输出时,MIN和MAX分别为9bit。
例如,探测器工作在1路输出模式,如果以探测器窗口中心的128×128范围内进行开窗,中心点的坐标为(159,127),点的坐标为(95,63),点的坐标为(223,191),则MIN=95,MIN=63,MAX=223,MAX=191。在进行窗口设置时发送的数据依次为00111111,10111111,001011111,011011111,设置数据应在DATAVALID信号的下降沿和INT信号的上升沿之间进行发送,时序如图7所示(探测器已输出一帧以上的图像)。
3)RS422接口
成像系统通过RS422接口完成与上位机之间的通信,系统从上位机接收的指令包括非均匀性校正、盲元标定、自定义窗口等。
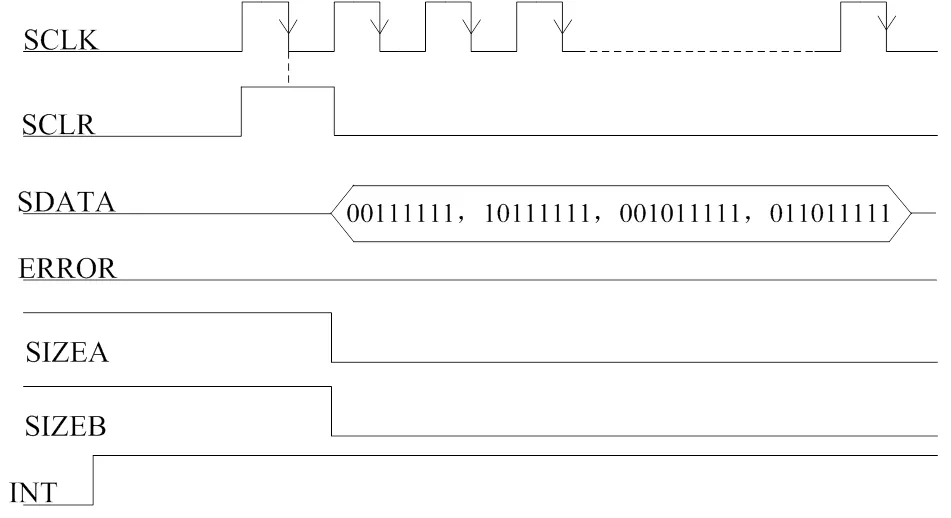
图7 探测器自定义窗口模式设置时序图
2.2.4.3 显示电路
显示电路的主要功能是将处理后的红外图像数据转会为适合监视器显示的模拟视频信号,以便于实验人员进行观测,电路框图如图8所示。
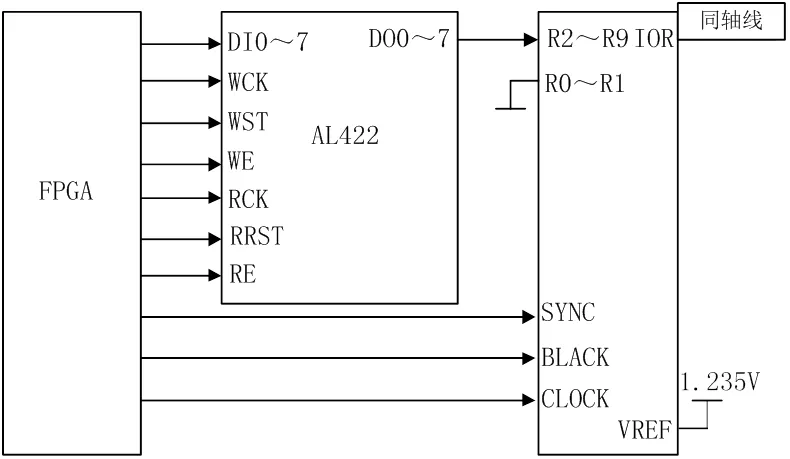
图8 模拟显示电路框图
为了缓存用于显示的图像数据,FPGA外接一个FIFO,选用AverLogic公司的AL422B,存储容量为3Mbit,可以存储一帧以上图像的完整信息。
系统选用AD公司的ADV7122,该芯片为专用的视频数模转换芯片,主要信号包括3组10位的数字视频输入信号,复合同步信号SYNC,消隐信号BLANK和时钟信号CLOCK等,外接一个1.235V的参考电压,采用高阻电流源的方式输出,可以直接驱动75W同轴电缆。
2.3 软件设计
2.3.1 非均匀性校正
两点校正算法是当前工程中应用最为广泛的非均匀性校正算法,该算法的使用前提是探测器的输出具有良好的线性度和时间稳定性,探测器在一定的响应范围和工作时间内都能够满足这两个要求[6]。两点校正公式为:
Y=AX+B(1)
式中:X为探测器像元的原始输出;Y为经过校正后的输出;A为增益系数;B为偏置系数。校正过程为:
1)计算单元响应

2)校正系数计算公式为:

2.3.2 自动盲元剔除算法
红外探测器中存在着对外界辐射响应过高、过低或者没有响应的盲元[7]。为了保证图像质量,红外成像系统出厂前都要标定盲元,并使用邻域灰度的平均值进行替代。但是受到工艺水平的限制,探测器经过较长时间贮存后,会产生以孤立盲元为主的新生盲元。如果不剔除这些盲元,图像质量必然下降。因此,系统在出厂时进行盲元标定的基础上,采用了自动盲元剔除算法。
自动盲元剔除算法是利用盲元的“惰性”,即在实时运动场景的若干时间段内,当图像内容因场景运动而发生变化时,盲元不会随之发生变化的特点而设计的。算法首先对图像是否运动进行判断,把图像分成×(如32×32)大小的区域并计算均值,统计相邻两帧图像中对应区域的均值差大于阈值的区域总数,如果超过了规定的门限,则判定图像发生了运动。如果某个像元在连续若干帧图像中均满足如下条件:为×邻域(如16×16)的局部极值,与邻域内其它像元灰度均值差的绝对值大于设定阈值,并且邻域中不存在与该像元灰度相接近的像元,则判定该像元为盲元。
使用自动盲元剔除算法对比效果如图9所示,可以看出,算法能够有效检测并剔除新增的孤立盲元。
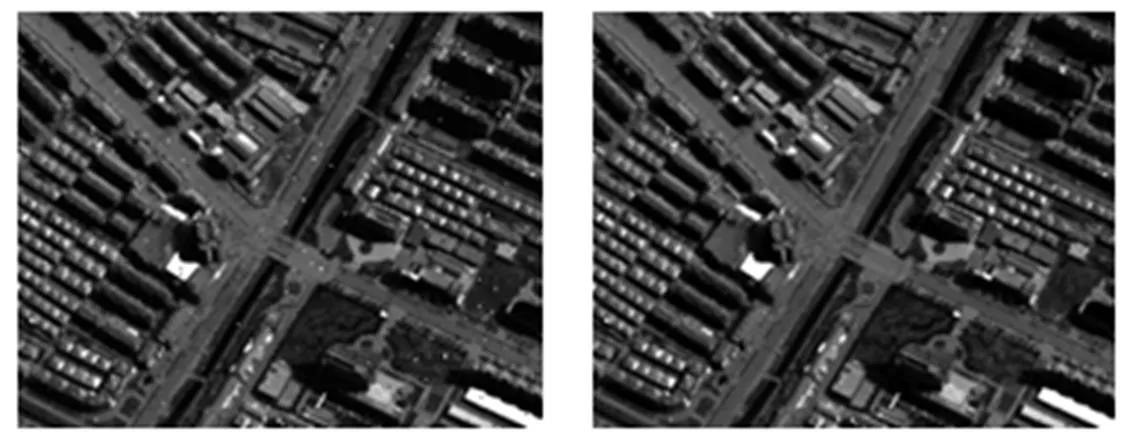
图9 自动盲元剔除算法使用前后对比
2.3.3 图像增强算法
由于光学系统等因素的影响,红外图像边缘会出现模糊的情况[8]。为了改善图像的视觉效果,提高清晰度,系统采用了自适应高通滤波加权平均增强算法,将原始图像与高频分量加权平均,以达到增强边缘的效果。使用的高通滤波模板如图10所示,将模板与原始图像进行卷积后可以得到图像的高频分量。
-1-1-1 -18-1 -1-1-1
图像增强算法的计算公式为:
f,j¢=[32f,j+(8f,j-f-1,j-1-f-1,j-f-1,j+1-f,j-1-
f,j+1-f+1,j-1-f+1,j-f+1,j+1)]/32 (3)
式中:f, j¢为增强后的像素灰度值;f,j为像素点及其8邻域范围内像素点的原始图像灰度;为加权系数。图像增强前后的对比如图11所示。
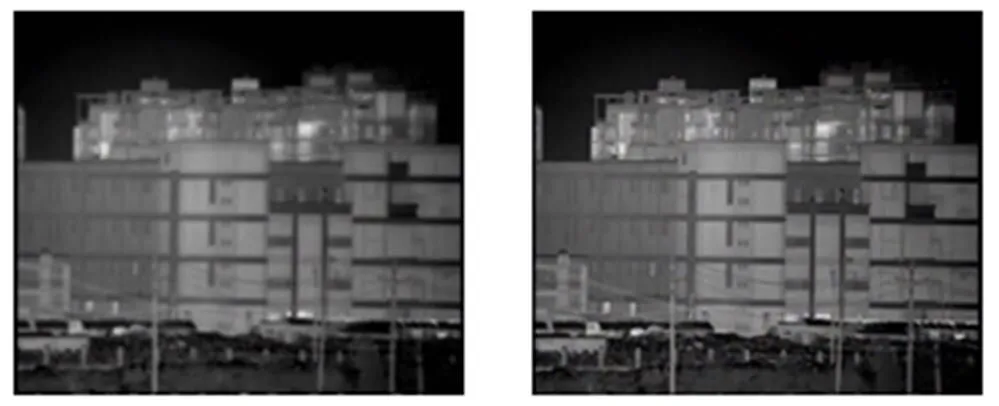
图11 图像增强前后效果对比
2.3.4 灰度拉伸映射算法
经过各种算法处理完后的红外数字图像通过模拟显示电路转换成模拟视频信号后,在监视器上进行显。但红外图像存在对比度弱的缺点[9],图12的红外图像灰度分布范围仅为7940~8120,直接取图像高8位进行显示的结果如图12(a)所示,无法分辨场景。因此系统采用了自适应的灰度拉伸映射算法对数据进行处理,以改善图像的显示效果。
算法中设置需要统计的像素上下限的比例为,取值范围一般在1%~5%,算法的流程为:统计得到图像灰度拉伸的上限值h和下限值l,h值的满足条件:图像中灰度大于h的像元总数占图像总像元数的比例等于。l值满足条件:图像中灰度小于l的像元总数占图像总像元数的比例等于;对图像每个像元进行灰度映射,如果灰度大于h则映射为255,如果灰度小于l,则映射为0,h和l之间的像元映射为:out=(out-l)×255/(h-l)。
使用灰度拉伸映射前后图像的效果对比如图12所示。
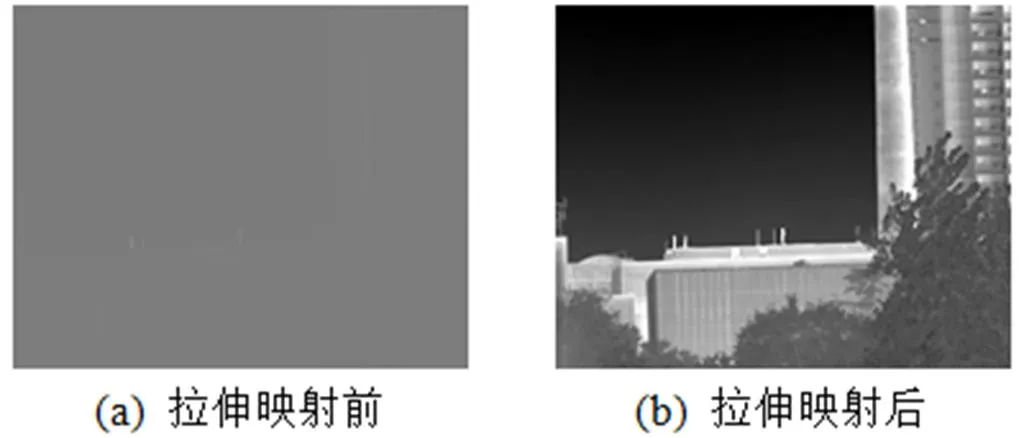
图12 灰度拉伸映射前后效果对比
3 试验结果及分析
系统调试完成后,通过试验对设计进行了验证,试验主要包括NETD测试、实际场景成像试验和自定义窗口模式试验。
在25℃和30℃黑体条件下,系统NETD测试结果为24mK,表明系统性能良好;对实际场景的成像和显示效果均良好。
对自定义窗口模式的测试方法为,通过上位机软件向成像系统发送相应的指令,系统接收到指令后进行模式和帧频切换,针对320×256(50Hz)、320×240(50Hz)、256×256(50Hz)、128×128(100Hz)、64×64(100Hz)等多种窗口模式进行了实验,系统均能够正常工作。
4 结束语
系统利用探测器的自定义窗口的工作模式,采用低噪声设计技术,以FPGA为核心,实现了非均匀性校正、自动盲元剔除、图像增强和灰度拉伸映射等算法,具有图像质量良好、环境适应性强和工作稳定等特点,能够满足红外跟踪装置模拟器等某些特殊设备的应用需求。
[1] 李春来, 林春, 陈小文, 等. 星载长波红外焦平面成像系统[J]. 红外与激光工程, 2012, 41(9): 2253-2260.
LI Chunlai, LIN Chun, CHEN Xiaowen, et al. Space-borne LWIR FPA imaging system[J]., 2012, 41(9): 2253-2260.
[2] 陶亮, 赵劲松, 刘传明, 等. 高可靠性红外热像仪的设计方法[J]. 红外技术, 2014, 36(12): 941-948.
TAO Liang, ZHAO Jinsong, LIU Chuanming, et al. Design methods of high reliability thermal imagers[J]., 2014, 36(12): 941-948.
[3] 王华伟, 曹剑中, 马彩文, 等. 具有自适应校正功能的红外成像系统设计[J]. 红外与激光工程, 2014, 43(1): 61-66.
WANG Huawei, CAO Jianzhong, Ma Caiwen, et al. Design of infrared imaging system with adaptive correction function[J]., 2014, 43(1): 61-66.
[4] 张钰, 邓希宁, 高旭辉. 基于空间应用的红外探测器驱动电路设计[J]. 激光与红外, 2015, 45(2): 150-152.
ZHANG Yu, DENG Xining, GAO Xuhui. Design of infrared detector driver circuit for space applications[J]., 2015, 45(2): 150-152.
[5] 刘万成, 唐树威. 基于FPGA实现的IRFPA探测器驱动电路的设计[J]. 光电技术应用, 2014, 29(1): 65-67.
LIU Wancheng, TANG Shuwei. Design of drive circuit of infrared focal plane array detector based on field-programmable gate array[J]., 2014, 29(1): 65-67.
[6] 张红辉, 罗海波, 余新荣, 等. 多点标定的自适应非均匀性校正方法[J]. 红外与激光工程, 2014, 43(11): 61-66.
ZHANG Honghui, LUO Haibo, YU Xinrong, et al. Adaptive non-uniformity correction algorithm based on multi-point correction[J]., 2014, 43(11): 61-66.
[7] 陈宝国, 樊养余, 王巍. 红外焦平面阵列盲元判据的相关性研究[J]. 激光与红外, 2013, 43(2): 186-189.
CHEN Baoguo, FAN Yangyu, WANG Wei. Research on relations among defective element criterions of IRFPA[J]., 2013, 43(2): 186-189.
[8] 武治国, 王延杰. 一种基于直方图非线性变换的图像对比度增强方法[J]. 光子学报, 2010, 39(4): 755-758.
WU Zhiguo, WANG Yanjie. An image enhancement algorithm based on histogram nonlinear transform[J]., 2010, 39(4): 755-758.
[9] 杨磊. 多段线性拉伸增强算法及其FPGA实现[J]. 红外技术, 2013, 35(10):642-645.
YANG Lei. Research on multi-segment linear stretch algorithm and its FPGA implementation[J]., 2013, 35(10): 642-645.
Infrared Image System Design of User-defined Window
WANG Mingchang1,2,FAN Yangyu1,WANG Xin3
(1.,,710072,; 2.,471009,; 3.,450000,)
IRFPA is becoming the leading device in theinfrared domain rapidly. Some tracker simulators need to use special image pixels, such as 320×256, 128×128 and 64×64. This paper proposes a method which uses the detector’s user-defined window mode to satisfy this requirement. It uses precision voltage reference to realize the bias voltage, and uses low noise technology to design the peripheral circuit. All the digital input and output signals are insulated by HCPL0630. It uses FPGA as a core to realize functions of interface control, user-defined window mode, digital video interface, RS422, analog to digital conversion, video display and algorithms of NUC, and automatically dead pixel elimination. It can be used in many fields, such as monitoring and algorithm proving.
infrared image,self-defined window,FPGA,NUC
TN919.3
A
1001-8891(2016)07-0550-06
2016-01-22;
2016-03-04.
王明昌(1977-),男,河南洛阳人,高级工程师,硕士,主要从事红外成像技术的研究。E-mail:wang_mc@126.com。
