边角后方交会在水平位移监测中的应用
2015-08-18广西水文地质工程地质勘察院广西柳州545000
■兰 亭■广西水文地质工程地质勘察院,广西 柳州 545000
近年来,随社会经济的发展,城市化进程的加快,大型的公共建筑和高层建筑越来越多,深基坑和高边坡的施工活动日渐增多,深基坑和高边坡一旦失稳,会危及其周围建(构)筑物和人民生命财产的安全,其安全性逐步引起人们的重视;在施工过程中虽然已引入第三方监测机制,但作为施工单位,为对自己的工程质量和施工安全及其施工进程进行有效控制,也有必要对基坑和高边坡进行动态的监 ,做到信息化、科学化地施工。一般城市基坑和高边坡施工场地比较 杂,空间狭窄,基准点和观测墩很难布设,周边围护和建筑物给监测造成极大影响,一般采用的视准线法、小角度法、极坐标法都难以施测。
采用边角后方交会法自由设站进行水平位移监测,站点设置灵活,网形多变,给基准点留下很大的布设空间,对于干扰较大的施工工程能大幅提高变形监测的作业效率。现今施工单位使用的多为2″级全站仪,在不增加仪器购买资金的投入,能否利用现有的设备进行有效的监控,在此做一些探讨。
1 边角后方交会点位误差分析
依据文献【1】得知,不考虑基准点误差的情况下,边角后方交会测站点K的点位精度公式为:

其中SAB为两基准点边长,Sa、Sb为两观测边长,r为观测交会角,A、B为两观测边Sb、Sa对应角,ma、mb为测距中误差,mr为测角中误差,ρ=206265。
从公式(1)可以看出边角后方交会点的点位精度不仅与测距、测角误差有关,还与交会的图形有关。
双测站极坐标观测法测站点到监测点的误差公式为:

其中S1、S2为测站到监测点的距离,ms1、ms2为测距中误差,mα1、mα2为测角中误差。
一般情况下,测站到测点的距离距离较近,测距误差主要由仪器测距固定误差引起,测角误差在同等观测精度下可认为一致,故令ms1=ms2,mα1=mα2,上式可化为

以徕卡TS06全站仪为例,其标称方向误差2″,测距误差1.5mm+2ppm,设基准边长 SAB=200m,Sa=Sb=200m,S1=100m,A=B=r=60°,水平角观测 6 个测回,则 mr=mα1=mα2=2.5″,带入上式得出监测点中误差:Mp=4.0mm,达到《建筑变形测量规范》(JGJ8-2007)二级监测规定的点位中误差限差±4.2mm的要求。
如果埋设的基准点是牢固稳定的,可以认为其对相邻两期观测的影响是相同的,可以在计算两期位移变化量中互相抵消。由上式可知,在不考虑基准点误差的情况下,监测点的误差由测站交会误差和测站观测目标误差构成。由于选择自由设站,测站到监测点的距离可控制到较小的范围,方向观测误差对点位坐标的影响可达到最小化,在使用同一台仪器监测的情况下,测距的系统误差可以得到进一步的减弱。
2 监测实例
宾阳县太守中学滑坡位置在教学楼西北侧后山,属低山丘陵地貌,为泥质滑坡,海拔高程为200m,原始自然坡度20~35°,四周植被较发育,主要为杂草、松树、桉树。滑坡范围约180×40米,上下高差约20米,该防治工程采用“削坡减载+截水沟+浆砌石挡墙及排水沟+浆砌块石格构+种植草皮”等防治方案对该边坡进行综合治理,在坡高10处设置2米宽的马道,均按1∶1的坡度分二级削坡;为了保证滑坡在治理后运行过程中的安全,评价工程施工质量,采用全站仪对治理后的边坡进行连续13个周期的监测,准确测定形变监测点的相对位移值,经合理的数据处理提供形变监测点的变化数据,以分析其变形与趋势,评估治理工程运行状态的稳定性与危险性,为设计单位和政府有关部门制定决策提供服务。
2.1 基准点埋设
在教学楼后墙角选择3个稳定牢固的水泥地面,用冲击电钻打孔,充填环氧树脂,埋入预制的不锈钢螺杆,用水平气泡进行校正,使螺杆处于垂直状态直至环氧树脂固结,编号为J1~J3。
2.2 监测点埋设
按照设计图纸布设的点位,在坡脚挡土墙顶埋设2个监测点,马道上埋设3个监测点,用冲击电钻打孔,充填环氧树脂,埋入预制的不锈钢螺杆,用水平气泡校正,使螺杆处于垂直状态,待胶水完全固结后才进行观测。
2.3 观测设备及观测方法
测站到基准点的最大观测边长为170m,到监测点的最大观测边长为110m,结合现有的仪器设备,水平位移监测以徕卡TS06全站仪(仪器标称精度:2″、1.5mm+2ppm)进行观测,仪器经测绘产品质量监督检验站检定合格后投入使用。监测频率为30d/次,前后观测1个水文年共13个周期。
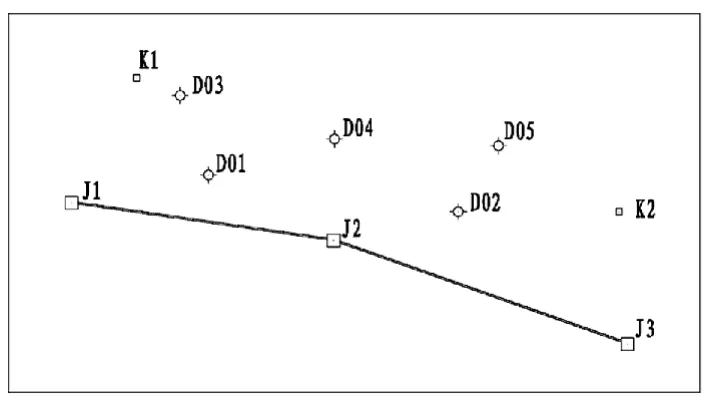
在通视良好、便于观测的地方,以三点后方交回法设置2个临时工作基点K1、K2,采用双测站极坐标法对监测点进行观测。水平角以方向观测法观测6个测回,基准点与监测点同组观测,在观测水平角的同时观测边长和垂直角并记录在仪器内存中,观测前仪器输入实测的大气温度及大气气压等参数。基准点、监测点均采用徕卡对中基座进行强制对中,并对基座、棱镜进行编号,使各周期观测中每个观测点都对应同一编号的基座棱镜组,以减弱对中误差及基座棱镜的机械加工误差,观测略图如下。
对于现场采集到的各项监测数据,首先进行粗差探测检验,确认合格后用计算机平差软件进行严密平差,计算各监测点每期坐标值及点位中误差,各期点位误差见下表。

监测点位误差统计表 单位:毫米观测周期K1 K2 D01 D02 D03 D04 D05点位中误差点位中误差点位中误差点位中误差点位中误差点位中误差点位中误差1 0.6 0.4 0.5 1.2 1.2 0.8 1.3 2 0.5 0.3 0.5 1.4 1.4 0.8 1.4 3 1.1 0.7 1.0 2.8 2.8 1.8 2.9 4 0.8 0.6 0.8 1.4 1.4 1.0 1.5 5 1.5 1.1 1.5 2.8 2.8 1.9 2.9 6 2.0 1.4 1.9 3.7 3.7 2.5 3.8 7 1.6 1.1 1.5 2.9 2.9 2.0 3.0 8 1.1 0.8 1.0 2.0 2.0 1.3 2.0 9 1.8 1.2 1.7 3.2 3.2 2.2 3.3 10 1.6 1.1 1.5 2.9 2.9 2.0 3.0 11 1.8 1.3 1.7 3.3 3.3 2.2 3.4 12 1.4 1.0 1.4 2.6 2.6 1.8 2.7 13 2.0 1.4 1.9 3.7 3.6 2.5 3.8
从表格中统计,测站K1、K2最小点位误差为0.3mm,最大点位误差为2.0mm,监测点最小点位误差为0.5mm,最大点位误差为3.8mm,符合国家现行有关测量规范要求。
经过一年的观测,各监测点的坐标变化量均在测量误差的控制范围之内,而且根据数理统计得出的变化趋势很微弱,可以认为在监测期间边坡是稳定不变的。
3 结束语
(1)采用全站仪边角后方交会法设立测站方便灵活,摆脱了传统需要固定测站的测量方式,可满足高精度的水平位移监测要求;其作业效率高,能有效地避开视线障碍物,基准点布置灵活,节省埋石造墩费用,降低监测成本,达到监测目的,是一种方便快捷、准确可靠地方法。
(2)在测站监测过程中,使用同一台仪器、同一观测人员和观测线路,测距偏差较小且稳定,观测边长不宜大于200m,采用相同的观测图形,相同的数据处理方法,测站适当接近监测点,各个观测目标宜采用同一个强制对中装置,削弱对中误差。
(3)对监测点的观测应采用双测站极坐标观测法,有利于提高观测精度,杜绝粗差,保证监测成果的可靠性。
[1]李全信.边角后方交会精度分析及布设方案选择.测绘工程,2000(9).
[2]李全信.关于边角后方交会中边角测量精度的匹配问题.测绘科技通信,1996(3).
[3]伊晓东,李保平.变形监测技术及应用.黄河水利出版社,2007.
