DVD光学头的RBF神经网络自适应PID控制器设计
2015-06-09张美凤蔡建文
张美凤,蔡建文
(1.常州工学院 电气与光电工程学院,江苏 常州 213002;2.常州现代光电技术研究院,江苏 常州 213002)
DVD光学头的RBF神经网络自适应PID控制器设计
张美凤1,2,蔡建文1,2
(1.常州工学院 电气与光电工程学院,江苏 常州 213002;2.常州现代光电技术研究院,江苏 常州 213002)
为了使三维光存储技术的应用水平得到提高,以DVD伺服技术、双光子吸收技术为基础组建了一套信息存储系统。针对DVD光学读取头系统,采用RBF神经网络自适应PID控制器进行控制,充分利用RBF神经网络的自学习和全局非线性逼近能力,在线调整修正PID控制器的3个参数,使其达到一种最优控制,并通过MATLAB软件进行了计算机仿真。由仿真结果可以得出:通过应用RBF神经网络自适应PID控制算法,系统单位阶跃响应的调整时间为0.25 s,并使系统的超调量降低到几乎为零。
DVD光学头;RBF神经网络;PID控制器;自适应;非线性逼近
引言
随着科技的迅猛发展和人们对信息存储容量需求的增大,光盘存储技术得到了快速的发展,已由传统的二维光盘存储技术发展到三维光盘存储技术[1-3]。但目前三维光存储技术都是基于实验室进行研究的,没有很好地应用到实际生产中。为了使三维光存储技术的应用化水平得到提高,以DVD伺服技术、双光子吸收技术为基础组建了一套信息存储系统[4],本文在此系统基础上,针对DVD光学头进行详细分析,建立DVD光学头的音圈电机电气模型,并根据此模型计算得出传递函数。为了提高DVD光学头控制系统的响应速度、减小系统的超调量,本文采用一种新算法即RBF神经网络自适应PID控制算法,通过RBF神经网络的自学习和全局非线性逼近的能力,实现实时在线调整修正PID控制器的3个参数,使其达到最优控制。
1 DVD光学头模型
DVD光学头是DVD光盘机的核心部件,它借助光盘反射光的光强、相位等特征产生伺服系统所需要的各种误差信号,从而读取光盘中所存储的各类数据信息。本实验采用的光学头为三洋公司的SF-HD60光学头。根据其使用手册[5]和DVD光学读取头的音圈电机的电气模型,经推导计算得到DVD光学读取头聚焦致动器的传递函数为[6]
(1)
2 RBF神经网络自适应PID控制原理
RBF神经网络自适应PID控制系统的结构如图1所示。该系统主要由两部分组成:
1) 经典的PID控制器。该控制器直接对被控对象进行闭环控制,对PID控制器的3个参数KP,KI,KD进行在线整定调整[7]。此控制器是过程控制中应用最广泛的一种基本控制规律[8]。
2)RBF神经网络辨识。通过RBF神经网络对被控对象建立辨识模型,从而达到对被控对象的辨识信息进行及时观测,并将观测的辨识信息提供给PID控制器。PID控制器就可以利用辨识模型的信息实时在线调整其3个参数,从而达到较好的控制精度,实现期望的控制目的。
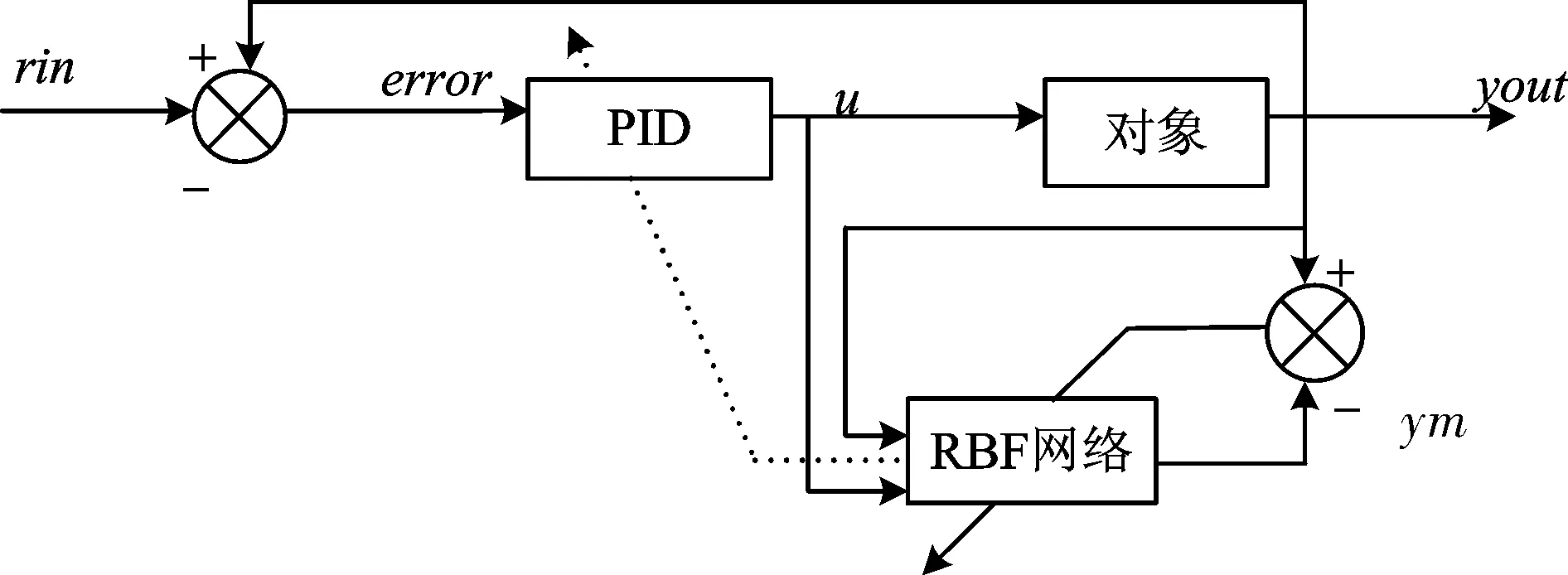
图1 RBF神经网络自适应PID控制系统Fig.1 RBF neural network adaptive PID control system
3 RBF神经网络PID控制算法分析及其仿真研究
3.1 算法分析
1)RBF神经网络
RBF神经网络是3层神经网络,从输入层空间到隐含层空间的变换是非线性的,而从隐含层到输出层之间的变换是线性的,因此,这就使局部极小问题得到解决[9],同时也使学习速度大大加快。本文的RBF网络结构如图2所示。输入层的节点有3个,即u(k)、yout(k)、yout(k-1);根据经验和不断试验隐含层节点选取6个,输出层节点只有一个即为ym(k),即本文RBF网络结构选为3-6-1结构。

图2 RBF网络结构Fig.2 RBF network structure
在本文中,RBF神经网络的输入向量为X=[x1,x2,x3]T,即x1=u(k),x2=yout(k),x3=yout(k-1)。第2层网络隐含层上的6个节点分别代表6个径向基函数,设其径向基向量为H=[h1,h2,h3,h4,h5,h6]T,其中hi为高斯基函数,即
(2)
在网络中,第j个节点的中心矢量为
Ci=[cj1,cj2,cj3]T
(3)
设网络的基宽向量为
B=[b1,b2,b3,b4,b5,b6]T
(4)
式中:bi为第j个节点的基宽度参数,且是一个大于零的数。
RBF神经网络隐含层到输出层的权向量为
W=[w1,w2,…,w6]T
(5)
则网络的输出为
(6)
RBF网络辨识器的性能指标函数为
(7)
通过最小化性能指标函数,可以得到节点中心及节点基宽、输出权的迭代算法如下:
(8)
bj(k)=bj(k-1)+ηΔbj+α(bj(k-1)-
bj(k-2))
(9)
(10)
cji(k)=cji(k-1)+ηΔcji+α(cji(k-1)-
cji(k-2))
(11)
wj(k)=wj(k-1)+η(yout(k)-ym(k))hj+
α(wj(k-1)-wj(k-2))
(12)
式中:α为动量因子;η为学习速率。
Jacobian阵算法为
(13)
2) RBF网络PID整定算法
本文中,PID控制器采用增量式,其控制误差为
error(k)=rin(k)-yout(k)
(14)
PID 3项输入为
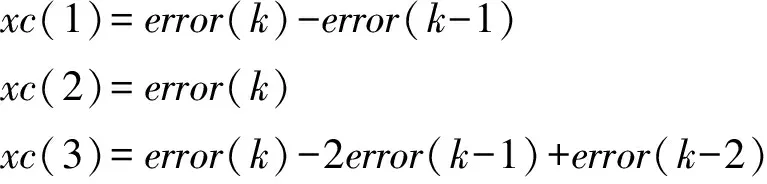
(15)
控制算法为
u(k)=u(k-1)+kp(error(k)-error(k-1))+
kierror(k)+kd(error(k)-
2error(k-1)+error(k-2))
神经网络整定指标为
(16)
通过梯度下降法,得到3个控制参数KP,KI,KD的调整算法为
(17)
(18)
(19)

3.2 DVD光学读取头的RBF神经网络自适应PID控制仿真
针对DVD光学头控制系统,系统的输出值要求能迅速地跟踪给定输入信号的变化,即需要尽快地跟踪上光盘位置角度的变化。应用RBF神经网络PID控制算法可以很好地实现这样的要求。
DVD光学头控制系统的RBF神经网络PID控制算法流程如图3所示。

图3 控制算法流程Fig.3 Flow chart of control algorithm
通过MATLAB编程对DVD光学头控制系统进行仿真。在仿真中,RBF神经网络结构确定为3-6-1结构,并设定学习效率为η=0.25,DVD光学头控制系统采样时间设定为0.001s,当控制系统的输入信号为单位阶跃信号时,得到系统的阶跃响应如图4所示,图5为参数自适应整定曲线。

图4 RBF神经网络PID控制的阶跃响应Fig.4 Step response of RBF neural network PID control
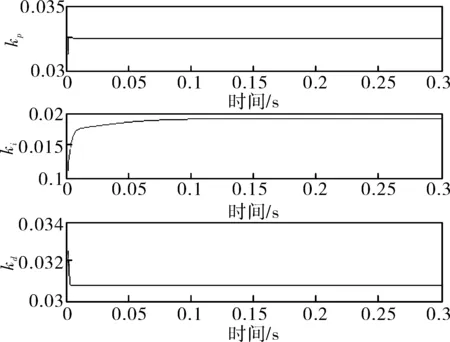
图5 参数自适应整定曲线Fig.5 Parameter adaptive tuning curve
由图4可以看出,通过应用RBF神经网络PID控制算法,DVD光学头系统阶跃响应的调整时间为0.25s,而文献[6]采用模糊PID控制算法的响应的调整时间为0.3s,阶跃响应的调整时间缩短了;超调量也由文献[6]的27%降到了几乎为零。从图5可以看出,PID的3个参数能够得到迅速的调整,其跟踪误差很快趋近于0。
4 结论
为了提高三维光存储技术的应用化水平,以DVD伺服技术、双光子吸收技术为基础组建了一套信息存储系统。本文针对DVD光学读取头传递函数,采用RBF神经网络PID控制算法,构建此控制系统的仿真模型,通过RBF神经网络的自学习和全局非线性逼近能力,实时调整修正PID控制器的3个参数,最后通过MATLAB进行了计算机仿真。仿真结果显示:采用RBF神经网络PID控制算法,明显提高了DVD光学头系统的响应速度,并使系统的超调量大大减小,较好地达到了系统性能指标的要求。
[1]SasakiT,MiksmiT,MochizukiH,etal.Readoutsignalintensityforthetwo-photonsensitizedfluorescentrecordingmaterials[J].SPIE,2010,7730:77301F-1-77301F-8.
[2]WalkerE,DvornikovA,CoblentzK,etal.Progressintwo-photon3Dopticaldatastorage[J].SPIE, 2008,7053: 705308-1-705308-9.
[3]GanicD,DayD,GuM.Multi-levelopticaldatastorageinaphotobleachingpolymerusingtwo-photonexcitationundercontinuouswaveillumination[J].OpticsandLasersinEngineering,2002,38(6):433-437.
[4]CaiJianwen,ShenZhaolong,JiangBing,etal.MultilayeropticalstoragesystembasedonCD/DVDpick-uphead[J].JournalofUniversityofScienceandTechnologyofChina, 2008,38(5):549-552. 蔡建文,沈兆龙,江兵,等.基于CD/DVD光头的多层光存储系统[J].中国科学技术大学学报,2008,38(5):549-552.
[5]SANYOMultimediaCompany.OpticalDVDpick-upspecificationsmodel:SF-HD60S[R].Japn:SANYOMultimediaCompany,2001.
[6]CaiJianwen,LiYuan,DongCaijun,etal.ApplicationoffuzzyPIDalgorithminDVDpick-upheadcontrol[J].SemiconductorOptoelectronics,2013,34(6):1047-1049. 蔡建文,李源,董才俊,等.模糊PID算法在DVD光学头控制中的应用研究[J].半导体光电,2013,34(6):1047-1049.
[7]ChenYifei.StudyandsimulationonPIDcontrolbasedonRBFneural[J].ComputerSimulation, 2011,28(4):212-215. 陈益飞.RBF神经网络的PID控制研究与仿真[J].计算机仿真,2011,28(4):212-215.
[8]BaiHong,ZhangLe.Applicationoffuzzy-PIDcontrolinATPsystem[J].JournalofAppliedOptics, 2009,30(1):29-33. 白宏,张乐.模糊PID控制在ATP伺服系统中的应用[J].应用光学,2009,30(1):29-33.
[9]XieYongcheng,DongJinzhao,LiGuangshen,etal.Applicationofradicalbasisfunctionneuralnetworkinfaultdiagnosisofrectifier[J].ComputerMeasurement&Control,2013,21(12):3184-3186. 谢永成,董今朝,李光升,等.RBF神经网络在整流器故障诊断中的应用[J].计算机测量与控制,2013,21(12):3184-3186.
Design of RBF neural network adaptive PID controller of DVD pick-up head
Zhang Meifeng1,2,Cai Jianwen1,2
(1.School of Electrical and Optoelectronic Engineering,Changzhou Institute of Technology,Changzhou 213002,China; 2.Changzhou Institute of Moderm Optoelectronic Technology,Changzhou 213002,China)
In order to improve the practical level of two-photon 3D optical storage technology,the information storage system was built based on DVD servo technology and two-photon absorption technology. The radial basis function (RBF) neural network self-adjusting proportional-integral-derivative (PID) control algorithm was used to built the simulation model of PID control system based on the transfer function of DVD pick-up head.The parameters of PID controller were adjusted online by the ability of the RBF neural network self learning and global nonlinear strong approximation and simulated by Matlab. It is proved that the settling time of the step response of the system is shortened to 0.25s and the overshoot of the system reduces to almost zero after applying the RBF neural network adaptive PID control algorithm.
DVD pick-up head;RBF neural network;PID controller;self-adaptive;nonlinear approximation
1002-2082(2015)06-0852-05
2015-07-14;
2015-09-21
常州现代光电技术研究院开放课题(CZGY008)
张美凤(1976-),女,山东潍坊人,博士研究生,讲师,主要从事激光微加工和自动检测方面的研究。
E-mail:zhangmf@czu.cn
TN202;TP273
A
10.5768/JAO201536.0601006
