小区视频监控的入侵检测算法
2015-04-21邢晓红李忠海
邱 楠 ,邢晓红,李忠海
(沈阳航空航天大学 自动化学院,沈阳 110136)
小区视频监控的入侵检测算法
邱 楠 ,邢晓红,李忠海
(沈阳航空航天大学 自动化学院,沈阳 110136)
目前运动目标入侵检测的算法有很多种,一些算法已经解决了一些监控中的实际问题,但是还存在很多挑战性的难题没有解决,如针对小区视频智能监控系统的研究比较少。对小区视频智能监控系统中的入侵检测算法进行了研究,设计并实现了较稳定、实时性和扩展性较强的小区智能视频监控系统。通过引入减缓因子等从局部和全局光照变化两个方面改进了混合高斯背景模型的参数更新方案,提出了基于万有引力定律的边缘检测算法,并将其与对称差分相结合,有效地解决了运动目标检测结果存在空洞、边缘信息破碎的问题。
智能视频监控;入侵检测;边缘检测;混合高斯背景
运动目标入侵检测是小区智能视频监控系统视频分析的重要内容,对视频智能监控系统进行图像智能分析时,首先要进行运动目标检测[1],方便对异常行为发生的位置定位。通过运动目标入侵检测,可以获得目标在视频图像中的位置、大小等信息[2]。运动目标检测的方法有很多种,各种算法在应用背景和对象上都有各自的局限性,在理论研究或应用工程中,应取长补短或合理地融合[3]。本文就对称差分法和背景差分法进行了研究,提出了基于万有引力定律边缘检测算法的对称差分融合背景差分的运动目标入侵检测算法。新的算法克服了背景差分和对称差分算法中,由于场景的复杂性、不可预知性、环境干扰和噪声的存在,如光照的变化、实际背景图像中物体的波动、运动物体进出场景对原场景的影响等缺点,使背景的建模和模拟变得不再困难。本文所用的数据存储空间也比单纯的背景差分少很多,并结合实验进行了比较分析。
1 视频智能监控技术的发展
1.1 国外研究现状
从总体上看,国外的视频智能监控系统已从理论研究和概念验证转型为应用阶段,智能视频监控产业也在慢慢形成。2003年,美国国防高级研究项目署(DARPA)主持了高级研究项目VSAM视觉监控研究,主要研究军用和民用的自动视频图像理解技术,它可以用于监视复杂场景。2004年,美国Vidient公司研制的系统SmartCatch可以由操作人员设定规则,通过系统的视频智能分析技术分析监控场景,检测出物品遗留、违规停车、警戒区非法入侵等异常行为则自动触发报警,用于CCTV监控系统中。2006年,IBM公司研发的智能视频监控系统成功进入市场应用阶段,此系统充分发挥网络资源,将前端设备捕捉到的视频通过网络传到安全监控软件,然后利用视频分析软件进行处理,若发现异常情况自动触发报警。2010年, Fadhlan Hafiz等人提出了改进的背景建模的方法,能够适应背景的变化,并开发了SVAS系统,能智能分析人的一些行为,应用于室内,如超市内。此外,英国的雷丁大学已开始对运动目标的跟踪技术进行研究,并应用于交通等领域实现对人和车辆的跟踪。微软公司也开展了应用于商业领域的手势识别接口技术研究。
1.2 国内研究现状
国内的研究大部分都集中在理论方面,视频智能监控技术的应用研究还不是很成熟,成型的大规模的视频智能监控系统还比较少。
隶属于中科院北京自动化研究所的国家重点实验室,对应用于交通领域的视频监控、人的运动以及简单的行为模式识别等进行了研究探索,取得了不错的研究成绩。国内一些高校也进行了视频智能监控技术的研究,具有代表性的是清华大学、北京大学、南京航空航天大学以及浙江大学等,课题包括背景建模、目标分类、目标跟踪以及视频内容分析等。西北工业大学空中交通管理系统研究所开展了应用于交通管理领域的智能视觉监控技术研究。在关于视频智能监控技术的研究中,运动目标检测的研究和运动目标跟踪的研究是最基础最关键的研究,直接影响诸如异常行为识别等后续研究的准确性。目前运动目标检测与运动目标跟踪的算法,克服了视频智能监控中存在的一些困难,但是仍然存在许多具有挑战性的实际问题,包括光照自适应性问题、特殊天气情况下(如雾天)的算法适用性问题等。这些问题的存在不利于视频智能监控系统的进一步完善和推广应用,另外,针对小区的视频智能监控系统的研究也比较少,因此,探寻能够从容应对复杂环境的各种变化,精确、实时和稳定的小区视频智能监控系统仍然是当前亟待解决的课题。
2 自适应更新混合高斯背景模型
运动目标入侵检测是从连续的视频图像序列中提取出不同帧的图像,对这些图像或特定区域进行作差,若差值大于规定的阈值,认为该区域是前景运动目标区域。背景差分法是视频智能监控中经常用到的运动目标检测方法,背景差分的结果能够体现出运动目标的大小、形状和位置等信息[4]。背景差分法比较简单,程序实现复杂度低,能够得到比较完整的运动目标区域。目前,国内外常用的背景提取和更新方法很多,例如中值法背景建模、均值法背景建模、单高斯分布模型、多高斯分布模型[5]、高级背景模型等。这些算法获得的背景图像较好,但运算量较大,占用较多的系统资源,系统实时性差,受物体波动、光照、阴影等外界条件的干扰较大。为更好地解决这些问题,本文在高斯背景建模算法的基础上提出了新的自适应背景提取和更新算法,从理论角度分析,该算法可以更好地适用现有小区的图像处理,可抑制性更好。原始的图像背景差分算法流程如图1所示。

图1 背景差分流程图
2.1 典型的混合高斯背景建模与存在的问题
高斯背景模型分为单高斯背景模型和混合高斯背景模型,单高斯背景模型适用于室内监控情况以及背景不是很复杂的室外监控情况,它用单高斯分布η(Xt,μt,Σt)为图像的所有像素点颜色度量值建立分布模型,其中下标t表示时间,μt为t时刻均值,Σt表示协方差。假设图像某像素点的颜色度量为Xt,若η(Xt,μt,Σt)≤Tp(Tp为概率阈值),那么此像素点属于前景,否则属于背景。在实际中,经常用等价的阈值代替概率阈值。如记dt=Xt-μt,dt/σt>Tp(σt是均方差)的取值决定阈值:若dt/σt>Tp,此像素点属于前景,否则就符合高斯分布,此像素点属于背景。在单高斯分布背景模型中,背景的更新就是各图像像素点的高斯分布相关参数的变化更新。其中背景模型更新公式如式(1)、式(2)所示:
μt+1=(1-α)*μt+α*dt
(1)
Σt+1=(1-α)*Σt+α*dt
(2)
其中,α代表更新率。
Stauffer等人提出的混合高斯背景模型[6]对每个像素点建立K个多维高斯分布,混合模拟此点的背景值。混合高斯背景建模是运用K个单高斯模型表征图像中每一个像素点的特征,在下帧图像到来后对混合高斯背景模型更新,再用当前图像中的每一个像素点与已建立好的混合高斯背景对应点的像素进行匹配,超过阈值的像素点判定为前景,否则判定为背景点[7]。
混合高斯背景模型流程如图2所示。
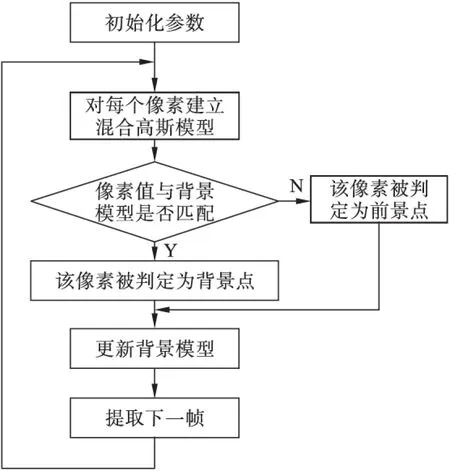
图2 混合高斯背景建模流程图
混合高斯背景模型的建立是对一帧图片上的每一个像素点进行高斯建模,而真正需要更新的是背景,前景图像并不需要一起更新,否则容易在背景中出现前景图像的“鬼影”。而且,每个像素点都进行更新会降低背景更新的速度,对系统的实时性造成一定的影响[8]。
2.2 改进的自适应混合高斯背景建模
(1)局部光照发生变化时的改进
在混合高斯背景建模中参数更新时,当像素值与高斯模型匹配时,高斯分布的均值和方差如式(3)、式(4)所示:
μi,t=μi,t-1+β(Xt-μi,t-1)
(3)
(4)

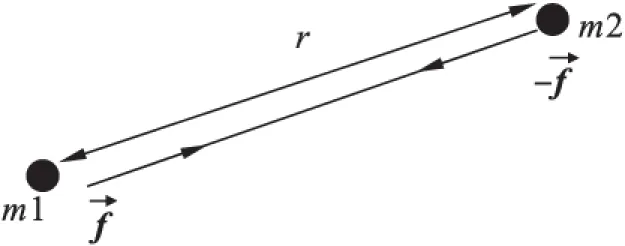
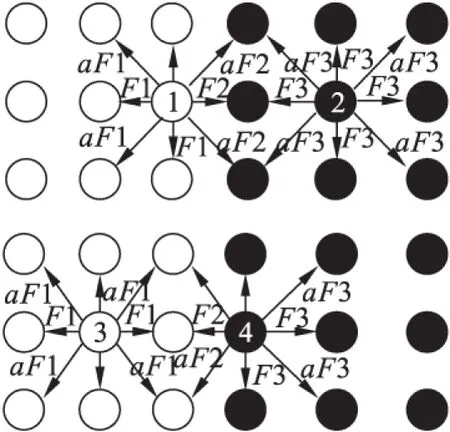
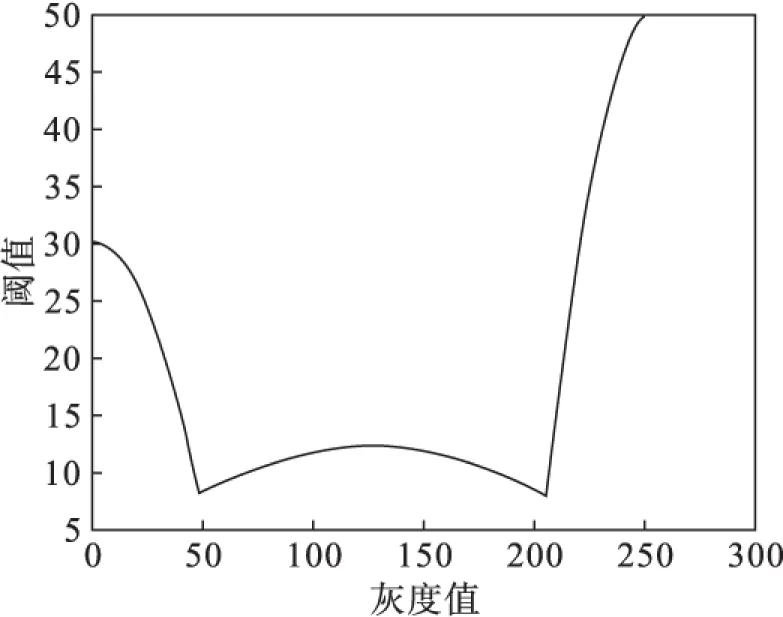
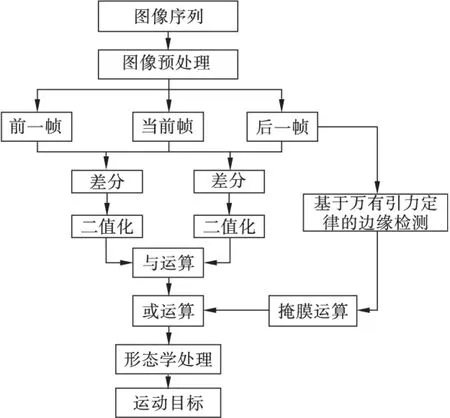
因此,本文提出了具有自适应特性的背景更新方法。设定Tσ为方差更新的阈值,并分两种更新情况:当|Xi,t-μi,t|>Tσ时,表示该像素值与均值有较大差距,则方差正常更新;若|Xi,t-μi,t| (5) 其中,减缓因子κ=Xt-μi,t,当前像素值和均值的差越小,减缓因子κ越小,方差更新越缓慢。根据经验,均值更新因子取值0.015,方差更新因子取0.005。 (2)全局光照发生变化时的改进 当全局光照发生突变的情况下,当前帧图像的像素值会产生较大变化,这种突变对方差估计影响不大,但是对均值估计影响很大。因此,本文对均值更新部分算法进行了改进。设平均灰度值变化阈值为Tμ,若当前帧像素的平均灰度值与背景模型的平均灰度值的绝对差值大于Tμ,表示光照强度变化较大,则更新背景模型的每一个高斯分布的均值;否则,均值正常更新。均值更新公式如式(6)所示: (6) 这里,mean(t)代表t时刻图像的平均灰度值。 在帧间差分算法的前提下提出了对称差分算法,对称差分算法的原理是:首先从图像序列中提取出三帧图像,先将前两帧图像进行帧间差分,再将后两帧图像进行帧间差分,最后将两次帧间差分的结果进行融合。对称差分算法得到的结果比帧间差分算法更好,但是仍然存在缺点,比如检测到的运动目标边缘不完整,前景目标可能存在空洞,导致此算法的适应性和检测结果质量大大降低[9]。因此,本文提出改进的对称差分算法,用基于万有引力定律的边缘检测算法与对称差分相结合,操作简单,有效解决运动目标检测结果存在空洞的问题。 3.1 基于万有引律定律的边缘检测算法 针对边缘检测算法的研究已经有近三十年的发展历史。如今成熟的边缘检测算法有很多种,但是每个算法都有其各自的优缺点,没有一种算法可以通用于所有图像。本文提出的基于引力定律和人眼视觉特性的阈值自适应边缘检测方法在检测效果及效率上都有很好的表现。本文提出了全新的模板扩展算法,该算法从不同于传统的角度来阐述了边缘检测方法,导出了一种基于万有引力定律的边缘检测算法模板。该算法在阈值确定时,根据待检像素的模板邻域的中值,并且结合人眼的视觉特征自适应地生成动态阈值,克服了传统的边缘检测算法离不开人为设定阈值的缺点。 (1)算法原理 根据物理学中的万有引力定律,任何两个物体之间彼此存在相互的作用力,其相互作用力的大小与物体的质量成正比,与其距离的平方成反比,如图3所示。在本文中,把万有引力定律加入图像边缘检测中。在某一幅图像中,每个像素点可以看作一个物体,这个物体的质量可以用该像素的灰度值来表示。对某个像素来说,其周围的像素点对它作用的引力的加权是一个具有大小和方向的矢量。而这个矢量可以描述像素点的边缘特性。矢量的大小表示图像边缘的强度,矢量的方向表示边缘的方向[10]。 图3 引力定律图示 图像的边缘是有4个方向的,但是为了简化符号,只对边缘的垂直方向进行研究,根据垂直方向的算法也可以推算出其它方向的算法。在图像上取某一像素点,此像素点的邻域像素点对其的作用力如图4所示,其中a=1/2。在这里,选择像素点周围的3×3邻域进行研究讨论。 (2)生成模板 在图像上取某一像素点I(i,j),选择此像素点周围m×n的邻域Ω,那么此像素点周围每个像素点对它的作用力大小可以用下式(7)计算得到: (7) 图4 矢量的方向结构图 (8) (9) 那么,像素点周围邻域Ω作用于像素点I的万有引力的矢量和计算如式(10)所示: (10) (11) θ=arctan(Fx/Fy) (12) 本文提出的算法是用图像像素和生成的模板进行卷积运算[11]: (13) (14) 依据式(13)和(14),令m=n=3则能够生成两个3×3的模板,如图5所示。 (3)动态阈值处理 传统的边缘检测算法需手动设定阈值,不同的图像设定的阈值的大小是不同的,在实际应用中常常受限。本文使用一种基于人类视觉的自适应动态阈值的方法。该算法源于人类视觉系统对图像的分辨能力根据图像灰度级不同而自适应变化的原理[12],人眼只能对一定范围的灰度级图像具有较高的识别能力,对于这种图像的噪声也比较敏感,而对灰度级比较高和灰度级比较低的图像的分辨能力很差。因此,边缘检测算法的阈值在人眼分辨能力比较强的部分要设置高点儿,相反在人眼识别能力较低的部分阈值要小,换句话说,即使图像具有相同的灰度差在灰度级不同的区域能否被认为边缘是不一定的[13]。 图5 3×3模板图 人类视觉系统分辨率比较高的灰度值大概是45到205的范围,人眼对灰度级别的图像识别能力与灰度值的大小并不是线性的。本文利用抛物线来计算模板边缘检测算法的阈值,阈值计算公式如图5所示,并将区域分为[0,45]、(45,205)和[205,255]三个部分,阈值的函数如图6所示。由于此方法结合了人类视觉系统对图像的分辨能力根据图像灰度级不同而不同的原理,因此此方法能应用的图像种类很广泛[14]。 图6 阈值的函数表示图 3.2 改进的对称差分算法设计 本文针对传统帧间差分算法[15]中存在的问题提出了改进的算法:利用基于万有引律定律的边缘检测算法与对称差分法进行融合,改进后的对称差分算法流程如图7所示。 图7 改进的对称差分流程图 算法介绍:(1)对图像序列进行预处理;(2)提取连续三帧图像,前一帧、当前帧、后一帧,两两差分并二值化,将结果进行逻辑与运算,同时利用基于万有引力定律的边缘检测算法进行边缘检测,获得图像的边界信息;(3)利用掩膜运算提取出运动目标的边缘轮廓并消除背景图像中的边缘信息;(4)将第(2)步中前景检测结果与第(3)步中掩膜运算的结果进行布尔或运算后再进行形态学处理,最终得到运动目标。 用本文改进的对称差分法对连续的三帧图像进行运动目标检测,得到初级运动目标A;同时用本文改进的混合高斯模型进行背景建模并提取背景图像,利用当前帧图像与背景图像进行背景差分得到初级运动目标B;再将初级运动目标A和初级运动目标B进行融合;最后对融合后的二值图像进行形态学处理,获得最终的运动目标。算法流程如图8所示。 为验证本文提出的算法,利用拍摄的小区监控视频图像进行了仿真实验,并与传统的方法进行了比较。 图8 小区视频监控系统运动目标检测流程图 图9 运动目标检测仿真结果图 图9是拍摄的小区监控视频进行的仿真结果,其中图9(a)是实时视频中的第561帧图像;图9(b)是利用传统的对称差分算法检测的结果,检测结果中的运动目标存在空洞,边缘轮廓不完整;图9(c)是应用传统的背景差分算法检测的结果,由图9(c)可知这种方法可以检测到完整的轮廓,但是受到树叶扰动和光照的影响较明显;图9(d)是利用本文算法得到的检测结果,可知本文算法检测的运动目标有完整的边缘轮廓,而且消除了树叶扰动及光照变化等的干扰,充分证明了本文算法的实用性和有效性。 本文介绍了高斯背景模型算法的基本原理,并通过引入减缓因子等从局部光照变化和全局光照变化两个方面改进了混合高斯背景模型的参数更新方案。将万有引力定律引入边缘检测算法,并将其与对称差分相结合,有效解决了运动目标检测结果存在空洞、边缘信息破碎的问题。最后将改进的混合高斯背景建模算法与改进的对称差分算法通过逻辑与运算进行数据融合,实现了小区智能视频监控中的运动目标检测,进行了仿真实验,并与传统的方法进行了比较,充分验证了本文算法的实用性和有效性。 [1]邓十弟.基于交通视频的运动目标检测和跟踪[D].西安:西北工业大学,2007:22-38. [2]袁国武.智能视频监控中的运动目标检测和跟踪算法研究[D].昆明:云南大学,2012:76-82. [3]丁忠校.视频监控图像的运动目标检测方法综述[J].视频应用与工程,2008,32(5):72-76. [4]胡燕,嵇启春,李智杰,等.视频监控中背景的提取和更新算法[J].计算技术与自动化,2009,28(1):142-144. [5]王永忠,梁彦,潘泉,等.基于自适应混合高斯模型的时空背景建模[J].自动化学报,2009,35(4):371-376. [6]Stauffer C,Grimson W.Adaptive background mixture models for realtime tracking [A].In:Proceedings of IEEE Conference on Computer Visi on and Pattern Recognition [C].Fort Collins,Colorado,USA,1999:246-252. [7]陈俊超,张俊豪,刘诗佳,等.基于背景建模与帧间差分的目标检测改进算法[J].计算机工程,2011,11(37):171-173. [8]张鹤,吴谨,吴雪垠.结合对称差分和边界信息的运动目标检测方法[J].信息技术,2011(11):138-141. [9]张鹤,吴谨.基于运动信息和标记多尺度分水岭的运动目标检测算法[J].液晶与显示,2012,27(2):251-256. [10]张春雪,陈秀宏.基于非线性滤波的万有引力边缘检测方法[J].计算机应用,2011,31(3):763-766. [11]Zhang Renyan,Zhao Guoling,SUH.A new edge detection method in image processing[C].Proe of IEEE International Sympo-sium on Communications and Information Technology,2005,6(3):445-448. [12]冷寒冰,王先,刘上乾,等.基于人眼视觉特性的邻域自适应模糊增强算法[J].光电工程,2004,31(1):62-65. [13]王福生,齐国清.二值图像中目标物体轮廓的边界跟踪算法[J].大连海事大学学报,2006,32(1):62-67. [14]昊颖谦,方涛,李聪亮,等.一种基于小波分析和人眼视觉特性的图像增强方法[J].数据采集与处理,2003,18(1):17-21. [15]武怀金,王武江.基于帧间差分方法的运动目标检测 [J].黑龙江科技信息,2012(10):32. (责任编辑:刘划 英文审校:刘敬钰) The intrusion detection algorithm of video monitoring QIU Nan,XING Xiao-hong,LI Zhong-hai (College of Automation,Shenyang Aerospace University,Shenyang 110136,China) Currently there are many kinds of intrusion detection algorithms of the moving targets,some of which have solved some practical monitoring problems.But there are many challenging ones unsolved,and still fewer studies of community intelligent video surveillance system.Therefore,the intrusion detection algorithms of the neighborhood video intelligent monitoring system are examined,and the intelligent video monitoring system with relative stability,real-time and strong scalability is designed and implemented.By introducing a mitigating factor,and from two aspects like the local and global illumination change,the parameters-updating scheme of Gaussian mixture background model is improved.The edge detection algorithm based on the law of universal gravitation is put forward,which is combined with the symmetric difference,effectively solving the problems of the emptiness and brokenness of the edge information of the moving target detection results. intelligent monitoring;intrusion detection;edge detection;gaussian mixture background 2015-04-03 沈阳航空航天大学青年教师自选科研课题(项目编号:201337Y) 邱楠(1980-),女,辽宁沈阳人,硕士,主要研究方向:控制科学与工程,E-mail:qiunan20002000@126.com。 2095-1248(2015)04-0083-07 TP277 A 10.3969/j.issn.2095-1248.2015.04.0143 改进的对称差分算法研究



4 改进的背景差分与帧间差分算法的融合与实验分析


5 结论
