无人直升机控制平台研究
2015-01-15李捍东张文征
高 虹,李捍东,张文征
(贵州大学电气工程学院,贵州 贵阳 550025)
0 引言
无人直升机具有独特的飞行性能,兼有无人机与直升机[1]的共同优点,具有重要的军事和民用价值。在控制上,无人直升机是一多自由度、多变量和强耦合[2]的系统。要使其具有好的飞行性能,关键是需要好的飞行控制算法和高性能的控制器。其飞行控制算法、管理任务及自主导航能力是无人直升机完成起飞、飞行、执行预定任务、降落回收等整个飞行过程的核心。本设计采用航模直升飞机作为机械平台,具有较好的可操纵性和负载能力。本文提出了一种基于ARM(控制计算)的飞行方案,系统通过采集并计算姿态传感器数据、GPS位置以及目标信息并且经ARM处理器处理得到飞机的控制方案,满足了设计的要求,提高该系统的可靠性。
1 飞机控制系统的总体设计
本文所研究的直升机飞行控制系统,其硬件部分系统主要包括:小型单旋翼无人直升机模型,ARM主控器,机载姿态传感器,GPS传感器等。众多传感器在飞行平台上组成了惯导系统[3],通过RFID无线技术为基站服务器提供无人直升机飞行过程中所有的飞行状态和导航信息,包括姿态角、航向角、三轴角速率、三轴线速度、线加速度、飞行位置等信息。接收系统通过串口和下位机相连接;用于和地面测控系统进行无线链路通讯。它接收地面测控系统的控制指令进行自动飞行以及机载工作设备的管理和控制等。而地面测控系统通过以太网接收无人机上的各种遥测信息、系统状态数据、任务工作设备的状态数据等。在系统调试阶段利用遥控器共同完成无人直升机的手动模式飞行。
2 飞机硬件控制系统
无人机飞行控制系统是一种以导航计算机和控制计算机为中心,并包括各种传感器及执行机构的闭环控制系统.硬件部分主要由控制器、三轴加速度计、三轴角速率陀螺仪、空速计、气压高度计、GPS模块、无线传输模块及各种舵机等组成。根据系统的设计要求,采用现有的ARM 32位CortexTM‐M3 CPU微处理器完成导航计算机和控制计算机的任务,由于采用更高端的处理器会增加成本,体积,功耗等,因此本系统设计了一种模块化、功耗小、体积小、成本低的控制系统[4]。设计的导航计算机和控制计算机不仅能够完成现行任务,而且还有很多资源没有运用,便于拓展功能。无人机飞行控制系统硬件框图如图1所示。
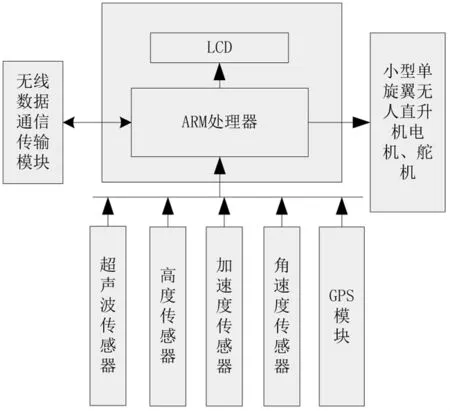
图1 无人机平台硬件框图
2.1 三轴传感器介绍
本设计采用的是MPU-6000加速度陀螺仪,该加速度计具有低成本、低功耗、耐冲击性强和灵敏度高等优点,加速度的检测分辨率高;响应速度快。陀螺仪采用了BGA封装,5 V电压的功耗为5 mW;该产品在机械振动0~2 kg的范围内都能进行稳定的输出。图2所示为MPU-6000的硬件连接图。
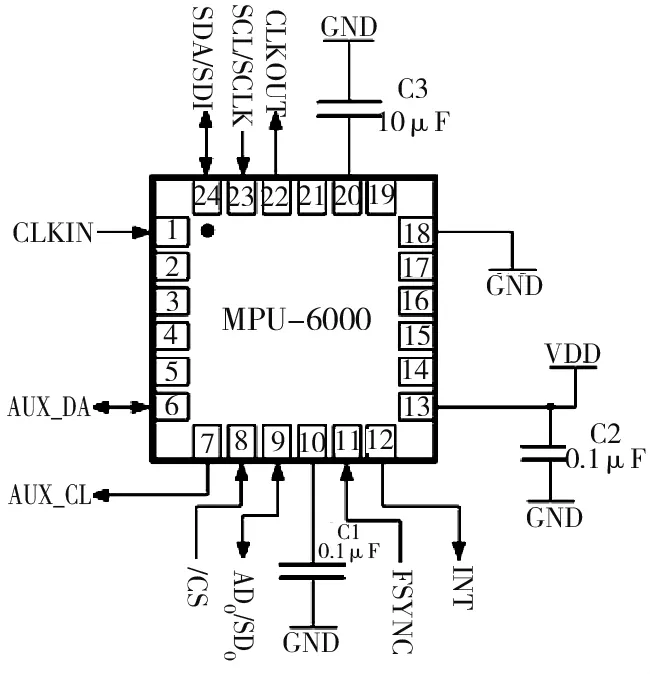
图2 MPU-6000连接图
2.2 GPS传感器介绍
GPS 定位系统用于实时检测无人机的飞行时间,速度,位置信息,本系统中采用的GPS接收机数据更新频率为5 Hz,通信协议为SPI协议,波特率为38 400 bps。
2.3 主控制器STM32F103VET6
无人机控制系统的主控制器芯片为基于ARM32位CortexTM‐ M3 CPU 的 STM32F103VET6,该芯片拥有2个I2C接口(支持SMBus/PMBus协议)用于姿态监测模块(支持加速度 +陀螺仪MPU6050、磁力计HMC5883、气压计BMP180)信号的输入接口,并具有多达5个USART接口(支持ISO7816,LIN,IrDA接口和调制解调控制)可用于GPS等模块,以太网通讯连接器,GPRS模块的接口等等,主频可达72 MHz,为直升机姿态解算及控制提供硬件支持。
3 系统软件设计
3.1 软件总体设计
在无人直升机系统运行过程中,需要对直升机机身上各个传感器进行综合分析、处理,拟合出直升机的三轴实时姿态,并根据算法进行姿态控制。在实际操作过程中,由于目前可以测量物体角度的传感器有以测量重力的加速度计及测量角速度的陀螺仪等,这些传感器在测量动态物体时会出现漂移的现象,无法准确测量直升机的姿态信息,因此,在本次设计中采用四元数算法[5]将加速度计、陀螺仪等传感器数据拟合计算出直升机三轴姿态,并以此为依据对直升机进行控制,使其平稳飞行。软件设计流程如图3所示。
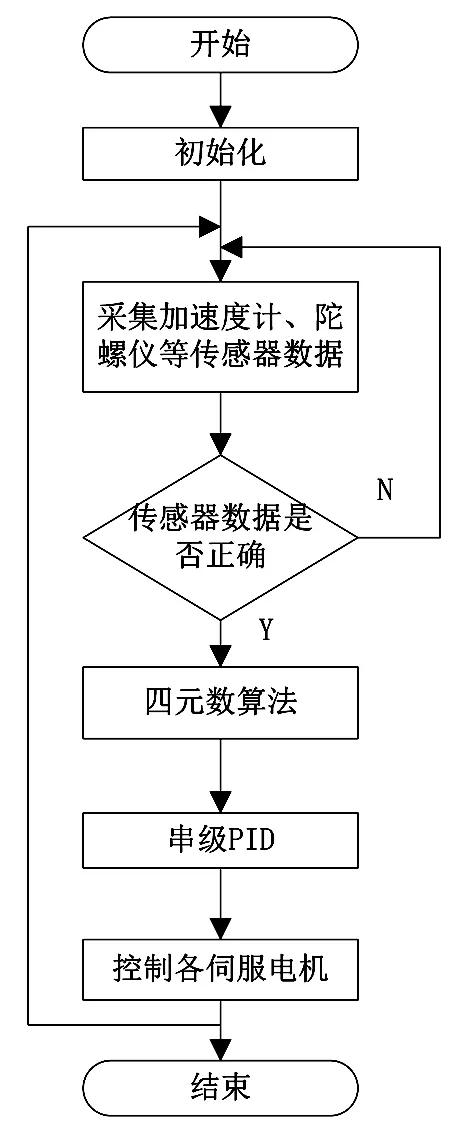
图3 软件设计流程图
3.2 四元数算法
在直升机模型飞行过程中,由于传感器自身的精度及机身本身会有剧烈震动,开环累计加速度或陀螺仪值无法精确反映出直升机当前姿态,因此,采用四元数算法闭环实时修正检测倾角,保证得到的姿态角度实时、准确。
3.3 串级PID
本设计由于在调试过程中应用PID算法发现平台对参数确实十分敏感,很难达到稳定的效果,经研究发现若将直升机模型简化为一个低阻尼二阶系统,角速率反馈可以增加其阻尼。本设计最终采用串级PID控制无人机舵机,一层是角度环,另一层是角速度环,得到理想的效果。图5所示为串级PID控制算法流程图。
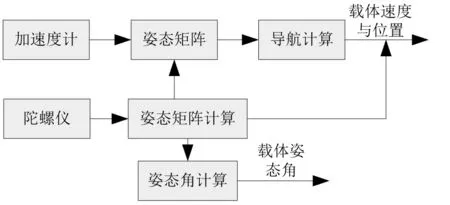
图4 闭环修正倾角原理图
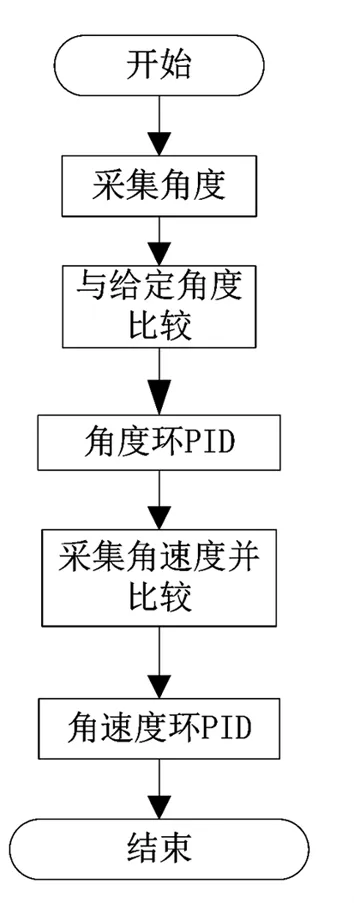
图5 串级PID控制算法流程图
4 结论
无人驾驶的直升机是机器人技术,电子技术,传感器技术发展的产物,也是现阶段研究的热点,具有广大的发展前景和研究价值。经过地面调试和动态实验,本文设计的无人机数据采集系统工作正常,满足飞行设计要求,采用本设计方案的[7]无人机飞控系统在实时性,高精度,小型化,高可靠性等方面均满足设计要求,并且具有功能全面,通用性好,成本低,功耗小,集控制系统与采集系统于一体等特点。
[1] 吴少琴.接收功率受限下的信道容量研究[J].电讯技术,2012,1(52):86-89
[2] 陈来九.热工过程自动调节原理和应用[M].北京:水利电力出版社,1982
[3] 刘栋炼.无人机飞控系统硬件设计与数据融合算法研究[D].华南理工大学自动化科学与工程学院,2009.5
[4] 徐爱钧.IAR EWARM嵌入式系统编程与实践[M].北京航空航天大学出版社,2006
[5] 常锐.小型自主无人直升飞机软件系统设计与实现[D].华南理工大学自动化科学与工程学院,2007.5
[6] 王凌,宋扬,李国林,张颖.基于有限状态机的飞行器自毁系统时序控制设计[J].现代电子技术,2009(8):1-3
[7] 吕印新,肖前贵,胡寿松.基于四元数互补滤波的无人机姿态解算燕山大学学报,2014.2
[8] 蔡伟峰.无人直升机视觉导航系统的分析与设计[D].华南理工大学自动化科学与工程学院,2010.5
