基于MATLAB和Pro/E摆动导杆机构运动学分析和仿真
2014-12-23许华杰马训鸣郭帆王韬
许华杰, 马训鸣, 郭帆, 王韬
(西安工程大学机电学院,西安710048)
0 引言
摆动导杆机构因具有良好的传力特性,被广泛应用于牛头刨床和涡电流阻尼器寿命测试等机械传动装置中,该机构由机架、曲柄、滑块和导杆组成。它将曲柄的旋转运动转换成为导杆的往复摆动[1]。评价其工作性能、优化设计的前提是构建数学模型,并对构件上特定点的速度和加速度进行分析,常用的方法有图解法和解析法。解析法建立模型虽然可得到高精度的分析结果,但需经过抽象和烦琐的数学推导和计算,容易出错;图解法虽简单、直观,但其精度不能满足工程的要求[2]。本文结合两者优点,采用解析法建立摆动导杆角速度、角加速度的数学模型,并借助MATLAB图形化显示其运动规律,对该机构使用Pro/E仿真得到同一参数的规律曲线,比较曲线的一致性,旨在验证解析法所建模型的正确性。
1 摆动导杆机构的组成和工作原理

图1 摆动导杆机构
图1为摆动导杆机构简图,将该机构置于直角坐标系Oxy中,导杆的固定铰链C点与坐标原点O重合。曲柄AB为主动件,长度为l1,导杆BC为从动件。经滑块、曲柄的连续转动转变为导杆绕y轴往复摆动。假设滑块在导杆上的位置距C点距离为l3,曲柄和导杆角位移分别为φ1、φ2。导杆摆动中心点C与曲柄旋转中心点A间的距离为l2,且满足 l1<l2。
2 建立系统数学模型
根据图1,把曲柄滑块机构看成封闭的矢量三角形,矢量方程式为:
将式(1)投影到x轴、y轴得:

由式(2)、式(3)得:tanφ2=
设曲柄匀速转动的角速度为 ω1,即 φ1=ω1t,将式(4)对时间t求导即可得到摆动导杆的角速度表达式:

由式(4)、式(5)可得:ω2=
3MATLAB图形仿真
MATLAB是MathWorks公司发布的主要面向科学计算、可视化以及交互式程序设计软件,用于数值分析、矩阵计算、优化设计和仿真等诸多领域。通过MATLAB编程绘制摆动导杆的角速度、角加速度曲线,从而揭示了摆动导杆的运动规律[3]。
3.1 仿真条件初始化
图1所示摆动导杆机构中,设定l1=500mm,l2=1000mm,曲柄匀速旋转的角速度 ω1=40 r/min(即(4π/3)rad/s),运动周期t=1.5 s。
3.2 仿真角速度ω2,角加速度γ曲线
在命令窗口中输入以下程序:
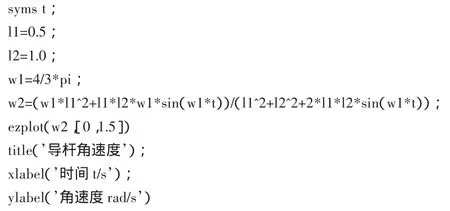
运行该程序可得导杆在一个周期的角速度随时间变化的曲线,且角速度在t=0.3811 s时取最大值1.396 rad/s,如图2所示。
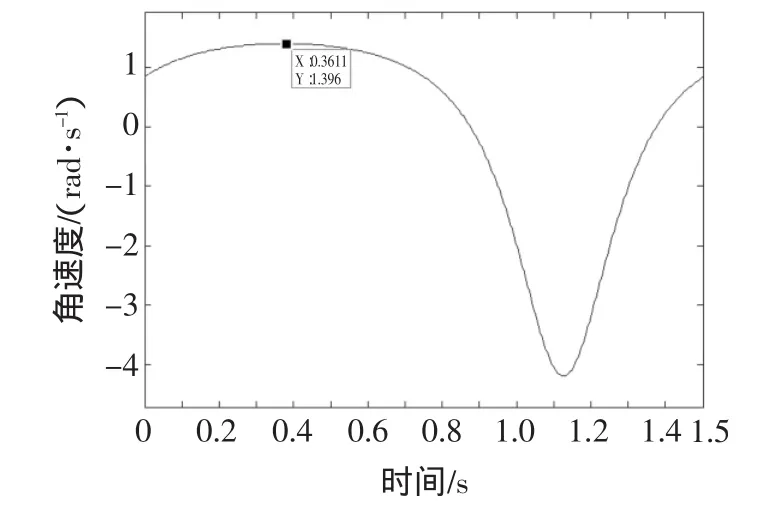
图2 摆动导杆角速度
在命令窗口中输入以下程序:
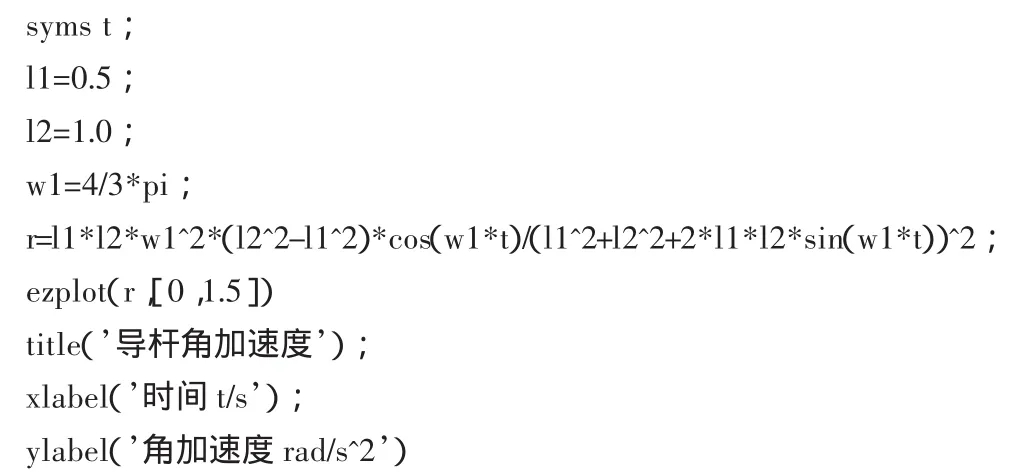

图3 摆动导杆角加速度
运行该程序可得导杆在一个周期的角加速度随时间变化的曲线,且角加速度在t=1.221 s时取最大值23.68 rad/s2,如图3 所示。
4 Pro/E运动学仿真分析
Pro/E是一款集成了CAD/CAM/CAE于一体的工程软件,具有极强的三维建模能力,其Mechanism模块具有运动学仿真、分析功能[4]。建立摆动导杆机构的虚拟模型,利用Mechanism对其进行运动学仿真,得到导杆的角速度、角加速度运动曲线。
4.1 建立骨架模型
在Pro/E5.0中建立摆动导杆机构的骨架模型,l1=500 mm,l2=1000 mm,如图4所示。

图4 骨架模型
4.2 运动仿真分析
利用Pro/E软件机构运动仿真模块Pro/Mechanism观察、分析导杆的角速度、角加速度变化走势,得出可视化图形。
在固定曲柄的轴上施加伺服电机,设定逆时针旋转速度240°/s。运动分析定义的“类型”设置为“角速度”、“角加速度”,图形显示的开始时间为0,终止时间为1.5 s,最小时间间隔为0.02 s,执行可得机构运行情况。设置测量定义,在“测量结果”对话框中同时选中新创建的测量定义和结果集中对应的机构运动分析,单击“绘制选定结果集所选定测量的图形”按钮,“图形工具”窗口中即显示导杆角速度和角加速度图形,如图5、图6所示。

图5 摆动导杆角速度

图6 摆动导杆角加速度
设置插入分析特征中的相关参数,运行可得到角速度在 t=0.38 s时取最大值79.99°/s(即1.39 rad/s),角加速度在t=1.22 s时取最大值1356.79°/s2(即23.68 rad/s2)。
对比图5与图2、图6与图3可见:导杆角速度、角加速度规律曲线的变化情况完全一致,最值分别相等且达到最值的时刻相同,验证了解析法所建模型的正确性。
5 结语
本文运用解析法建立摆动导杆机构导杆的角速度、角加速度数学模型,借助MATLAB软件绘制其规律曲线。应用Pro/E软件建立同一机构的骨架模型,对其进行运动学仿真、分析、测量得到运动规律曲线。结果表明,同一摆动导杆机构的导杆角速度、角加速度由MATLAB绘制解析法推导出的运动曲线和Pro/E仿真得到的运动曲线完全一致,从而验证了解析法所建摆动导杆机构数学模型和分析运动规律所得结论的正确性。
[1] 赵匀.机构数值分析与综合[M].北京:机械工业出版社,2005.
[2] 岳修科,黄俊杰.MATLAB在平面机构运动解析法分析中的应用[J].机械,2006,3(8):27-28,64.
[3] 陈杰平.Matlab在连杆机构仿真中的应用[J].制造业信息化,2005(11):116-117.
[4] 杜白石,刘洪萍.Pro/ENGINEER设计分析和优化机构[M].北京:电子工业出版社,2012.
