心形曲柄导杆间歇机构分析与综合
2022-02-19韩昊桐
韩昊桐
(江苏淮工车辆检测研究院有限公司徐州检测鉴定中心,江苏 徐州 221003)
心形线是摆线的一种。数学定义为一个动圆沿一相同的固定圆作纯滚动运动,则动圆圆周上某一点所经过的轨迹称为心形线[1]。从机构学的角度看,心形线是由1个固定中心轮、1个系杆和1个行星轮组成的行星机构生成[2],其行星轮和固定中心轮为齿数相同的外齿轮。行星轮节圆上任意一点的轨迹就是心形线。用摆线生成机构替代一般机构的曲柄,构成一类特殊的齿轮连杆组合机构[2-10]。这类机构相当于具有一个长度和速度都在变化的曲柄——摆线曲柄[3]、椭圆曲柄[4]或心形曲柄[5]等等,机构的运动学特性产生很大的变化。如用摆线曲柄代替槽轮机构的驱动圆销,就会获得一些变运动系数槽轮机构[5-7]、无冲击槽轮机构[8-9]、瞬时间歇运动槽轮机构[2,8]或近似等速运动槽轮机构[10]等等。本文用生成标准心形线的心形曲柄与导杆机构组合,获得具有间歇运动的强急回导杆机构,给出了机构的分析与综合方法。
1 心形曲柄导杆机构分析
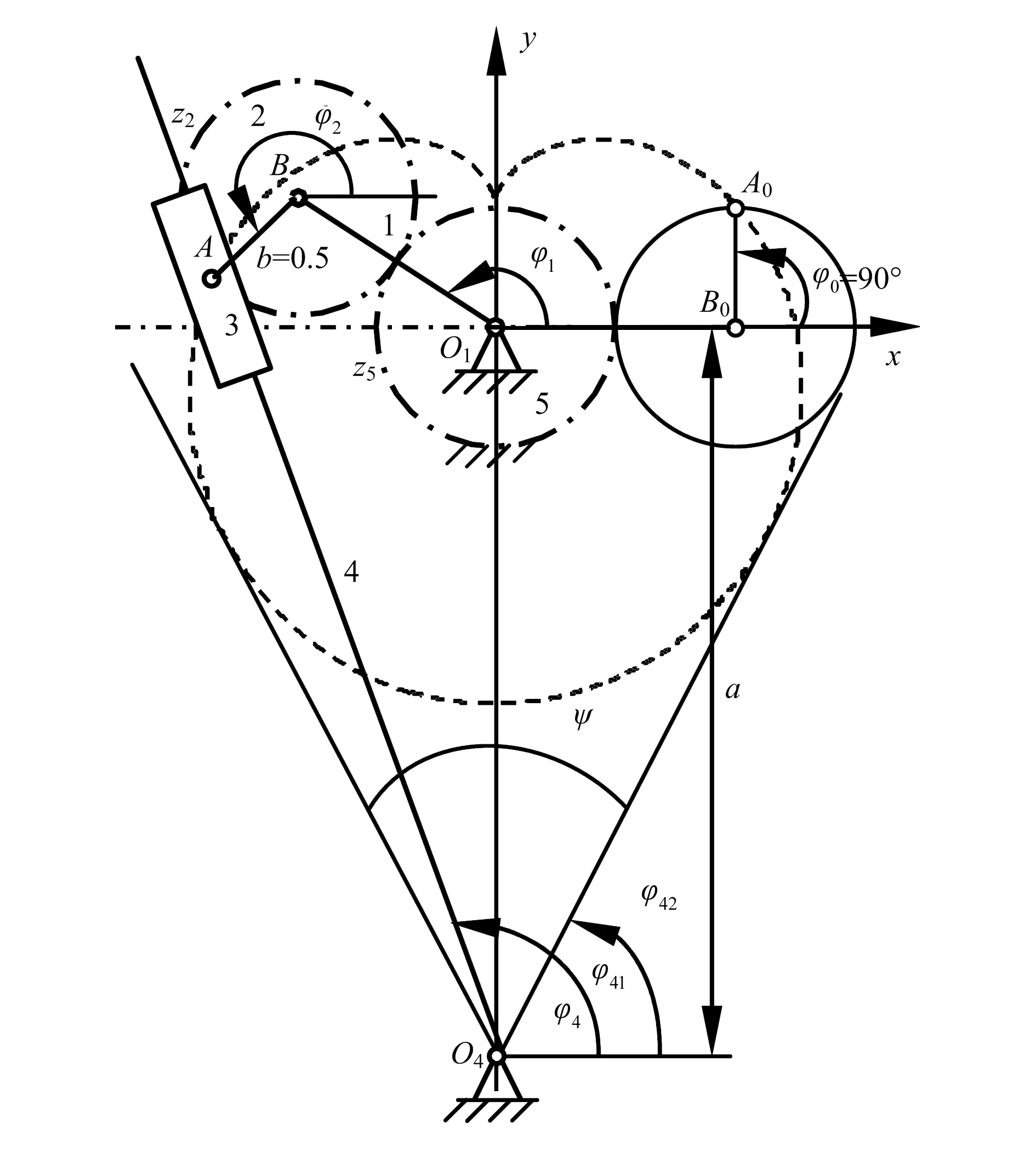
图1 心形曲柄导杆间歇机构
1.1 运动分析


(1)

整理得
dφ2=2dφ1
(2)
对式(2)积分并代入初始条件φ1=0,φ2=90°,得
φ2=2φ1+90°
(3)
因此,行星轮2上动点A的坐标(x,y)可表示为
(4)
导杆4的位置φ4可由tanφ4=(a+y)/x求得,将式(4)代入并整理得
(5)
(6)
(7)
1.2 导杆的极限位置
4asin2φ1+(3-2a)sinφ1-3-2a=0
(8)
这是一个关于sinφ1的二次方程,其一个根sinφ1=1,φ1=90°,对应于心形线y轴处的尖点,不是极限位置;另一根代表导杆4的右极限位置φ41所对应的系杆1位置,用φ11表示,即
(9)
导杆4的左极限位置φ42对应的系杆1位置用φ12表示,φ12是φ11的补角,即
(10)
将式(9)代入式(5)得到导杆4的右极限位置φ41为
(11)
由此注意到导杆4的左、右极限位置是关于y轴对称的,容易得到
(12)
导杆4的摆角ψ为φ42-φ41,即
(13)
导杆4的行程速度变化系数k为
(14)
心形曲柄导杆机构的运动曲线图如图2所示。在φ1=90°位置,也就是心形线的尖点位置,导杆4角速度和角加速度都为0,表现为瞬时间歇运动。由于心形线的上半区是慢速运动区域,下半区是快速运动区域,这一速度变化特性使得心形曲柄导杆机构具有较强的急回特性。
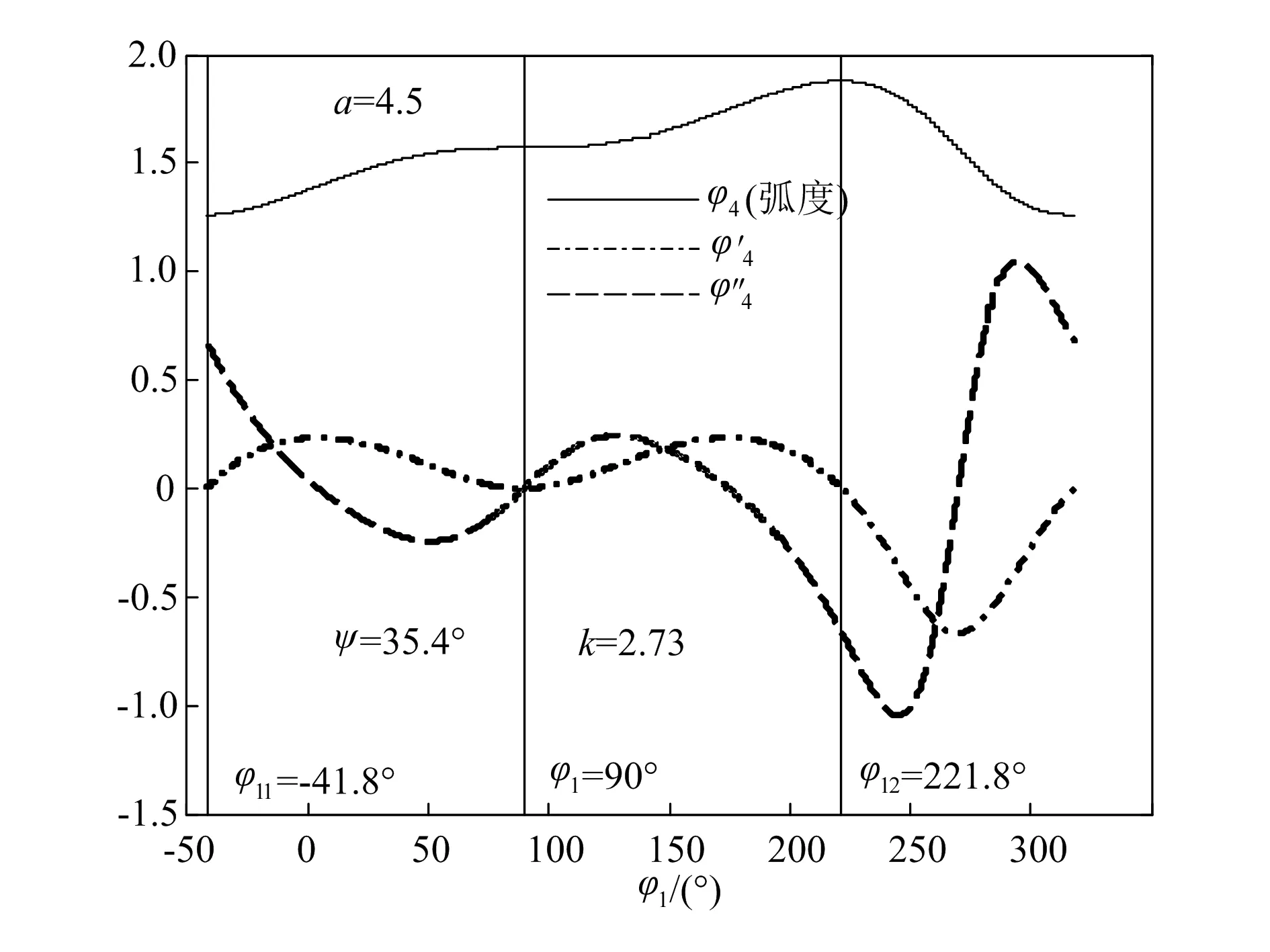
图2 心形曲柄导杆机构运动线图
1.3 中心距对机构的影响

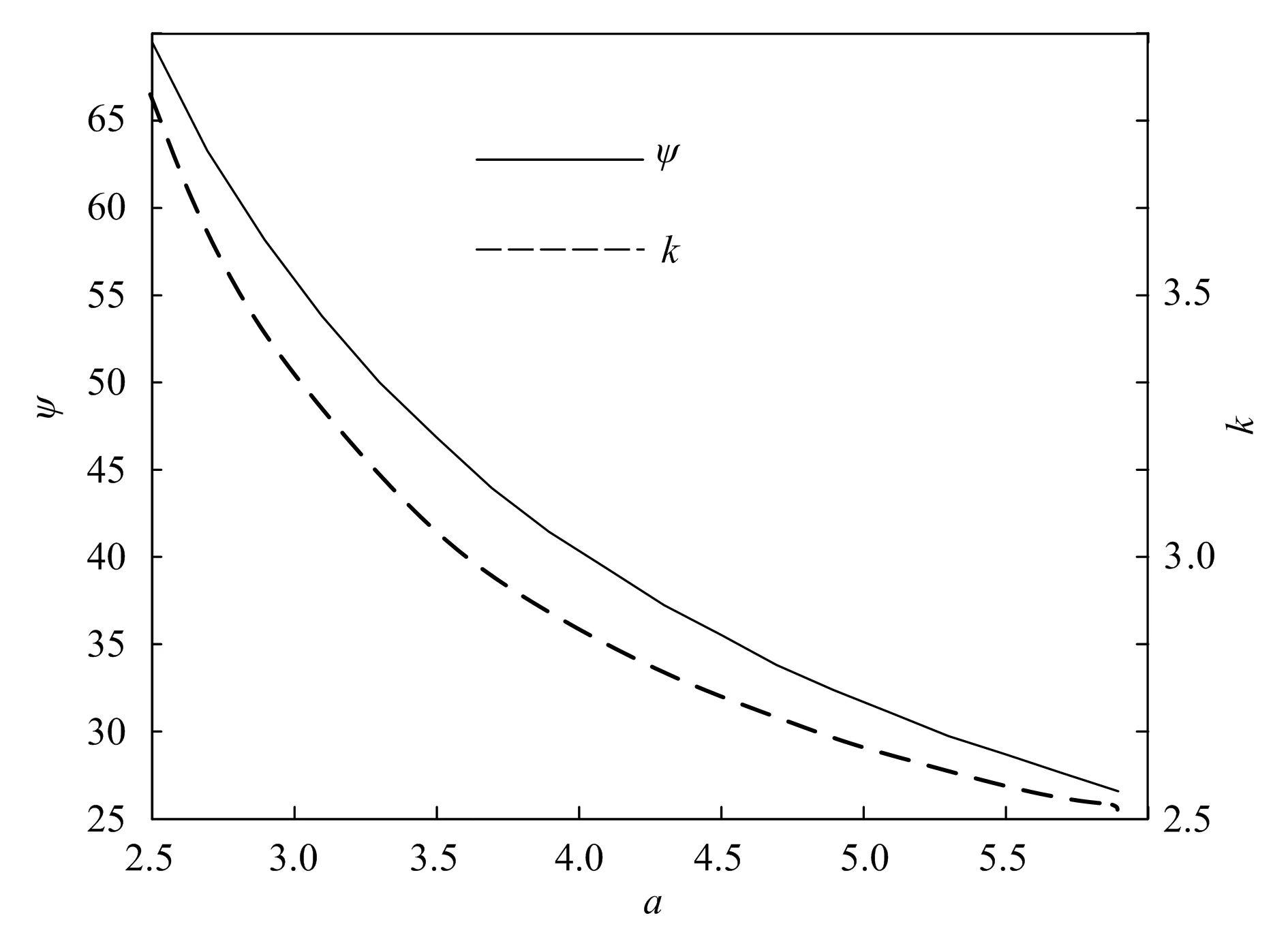
图3 中心距a对机构运动性能的影响

图4 中心距a对导杆角速度和角加速度的影响
2 心形曲柄导杆机构综合
2.1 按导杆摆角ψ设计机构
导杆机构的导杆摆角ψ是主要工作参数。当给定导杆摆角ψ时,由式(13)得到
(15)
整理得到
(16)
这是一个标准型的三次方程,其根为
(17)
2.2 按行程速度变化系数k设计机构
当给定行程速度变化系数k时,将式(9)和式(10)代入式(14)得到
(18)
整理得
(19)
2.3 导杆最小长度
为了确保铰链A能够推动导杆运动,导杆在运动过程中应该完全覆盖心形线,如图1所示。铰链A到O4的距离l为
(20)
最小导杆长度应在∂l2/∂φ1=0的位置,即
(1-2a)cosφ1+2asin(2φ1)=0
(21)
解式(21)得到
(22)
将式(22)代入式(20)得到最小导杆长度lmin为
(23)
3 结束语
心形曲柄导杆机构具有强急回特性,在慢速工作行程中间位置具有瞬时停歇运动特性。本文的心形曲柄导杆机构特指标准心形线机构,当铰链A不在行星轮节圆上时,行星连杆长度b不等于0.5,机构的运动更为复杂多变。
