成都地铁三号线控制网的布设
2014-06-29王晓芳唐青松
王晓芳,唐青松
(成都市勘察测绘研究院,四川成都 610081)
1 前言
成都地铁三号线工程是继成都地铁一、二、四号线工程建设后启动的第四条地铁建设工程。地铁三号线沿成都市东北——西南方向规划,起于天回镇南站,止于红牌楼南站,全长 19.63 km,共设车站17座。三号线东北部位于成都“北改”区域,经过大范围拆迁区,其余部分位于繁华地段,车辆繁多,沿线高层建筑物林立,大功率信号源密布,对控制网的选埋和观测造成了一定难度。控制网沿地铁走向呈带状分布。平面控制网分两级布设,首级为GPS控制网,二级为精密导线网;高程控制网为城市轨道交通工程一等水准网。平面控制网采用成都市平面坐标系,高程控制网采用成都市高程系。
2 GPS控制网
2.1 布网情况
三号线GPS控制网以成都地铁框架网为基础,沿三号线线路成带状分布,采用边连式构网(如图1所示),闭合环边数均小于6,共联测了6个地铁框架网GPS点,沿用9个保存完好的地铁一、二、四号线GPS点,新选埋35个GPS点(均为房顶标石)。三号线与各条规划地铁线路交叉地段均至少布设了一对GPS点,GPS点均至少具有两个以上通视方向。
2.2 外业观测
采用5台Trimble双频GPS接收机同步观测29个时段,时段观测时间均大于 60 min(基线较长的时段,观测时段长度均大于 150 min),共设站139站,重复设站数为2.78。共观测到271条基线,其中独立基线116条。
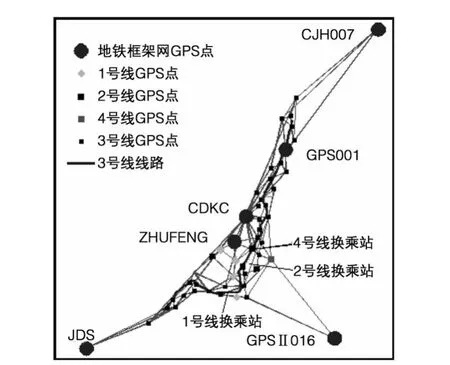
图1 GPS控制网示意图
2.3 基线解算及数据检验
采用TBC2.50软件进行基线解算。基线解算完成后进行复测基线长度较差、三边同步环闭合差、异步环闭合差的检验,共统计了65对复测基线,三边同步环232个,三边独立环529个,其精度均满足规范要求,具体详如图2和表1、表2所示。
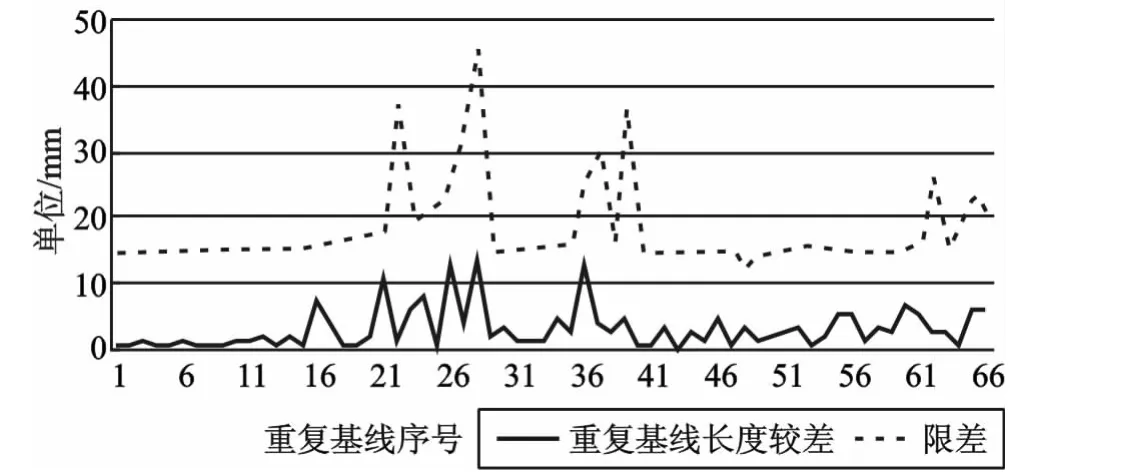
图2 复测基线长度较差及限差

三边同步环闭合差相对精度 表1
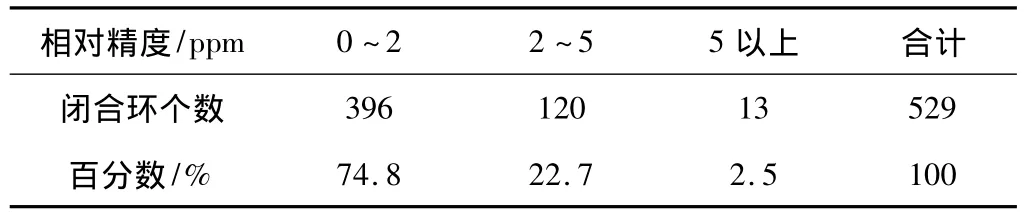
三边异步环闭合差相对精度 表2
2.4 网平差
(1)三维无约束平差
采用武汉大学研发的CosaGPS软件,提取116条独立基线组成闭合图形,以三维基线向量及其相应方差——协方差阵为观测信息,以CDKC的WGS-84坐标为起算数据进行三维无约束平差。平差后,X分量改正数绝对值最大为 10.6 mm(限差为 29.1 mm),Y分量改正数绝对值最大为 24.3 mm(限差为 34.6 mm),Z分量改正数绝对值最大为 16.6 mm(限差为31.8 mm),基线分量改正数均小于限差,如图3所示。
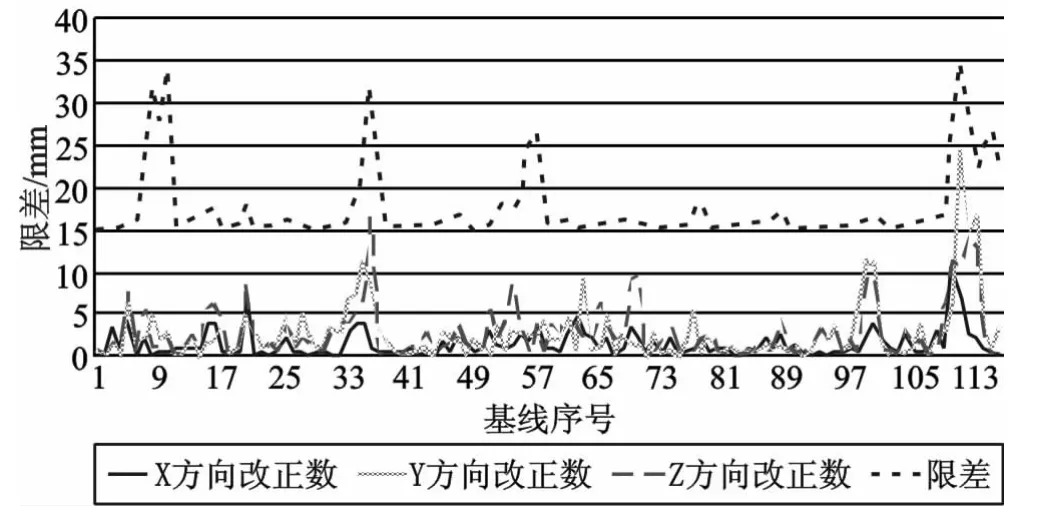
图3 三维约束平差后基线向量改正数及限差统计
(2)二维约束平差
①已知点兼容性分析
以CJH007、GPSⅡ016和JDS三点成果作为起算数据进行二维约束平差。平差后,最弱点点位中误差为 ±4.9 mm,最弱边相对中误差为 3.10 ppm,相邻点的相对点位中误差最大值为 ±3.2 mm。将未约束的3点平差后坐标与原框架网坐标进行比较,坐标较差分别为:14.9 mm、12.6 mm和 16.9 mm,其坐标差值相对于约束点的边长相对精度均远小于城市二等GPS网的最弱边相对中误差(1/120 000,8.33 ppm)。综上,联测的6个框架网GPS点具有较好的兼容性。
②约束平差
固定6个地铁框架网GPS点进行二维约束平差,平差后最弱边相对中误差为 3.91 ppm(限差为10 ppm),最弱点点位中误差为 ±5.2 mm(限差为±12 mm),相邻点的相对点位中误差最大值为±4.0 mm(限差为 ±10 mm),精度统计情况如图4和图5所示。
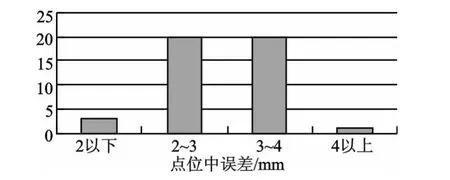
图4 点位中误差区间分布图
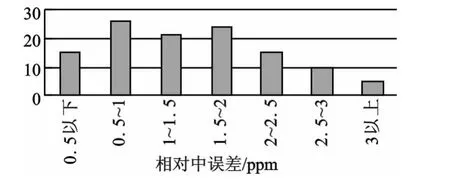
图5 基线相对中误差区间分布图
③重合点成果比较
将重合点成果与一号线、二号线和四号线GPS控制网成果进行比较,重合点坐标较差均小于 25 mm,符合规范要求。
3 精密导线网
3.1 布网情况
沿地铁三号线线路方向,采用附合导线、闭合导线和结点网的形式进行布网。共包含65个导线点和35个GPS点,由20个附合导线和6个闭合导线构成。在车站附近,尽可能将导线网布设成环,增加导线点数量,增加通视方向,利于控制点的长期保存和使用方便。
3.2 外业观测
采用Leica TCA2003全站仪进行外业观测,共设站86站,如图6所示。
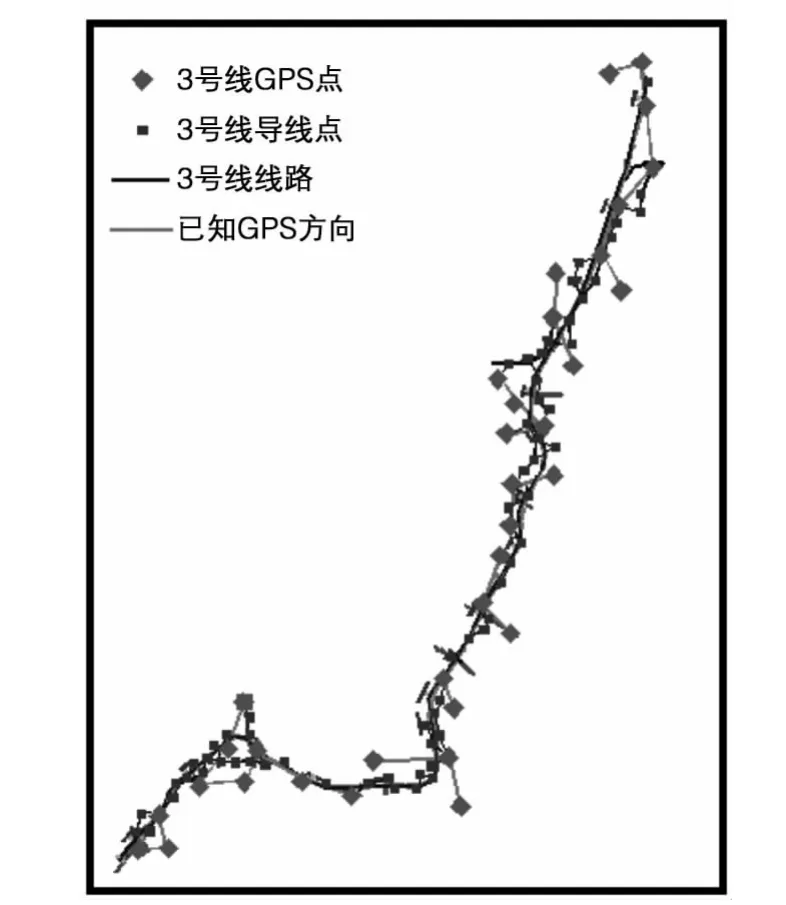
图6 精密导线网示意图
3.3 数据概算
附合导线或闭合导线的方位角闭合差绝对值最大为8.6″(限差14.1″),由方位角闭合差计算精密导线网的测角中误差 MO=±1.53″(限差±2.50″),全长相对闭合差最差为 11.33 ppm(限差 28.57 ppm)。高程归化改正值最大为 5.4 mm。投影改化改正值最大为0.1 mm,可忽略,故未进行投影改化。
3.4 严密平差
采用武汉大学研发的Cosa软件进行平差计算,将联测的35个GPS点全部固定进行严密平差。平差后,相邻点的相对点位中误差最大为 ±4.6 mm(限差±8 mm),测距相对中误差最大为 13.16 ppm(限差16.67 ppm),点位中误差最大值为 ±6.0 mm,测角中误差为±1.34″(限差±2.5″),导线边距离改正值最大为2.5 mm,由改正值计算测距中误差为 ±0.7 mm(限差±4 mm)。精度统计情况如图7、图8所示。
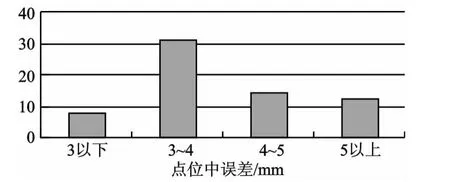
图7 导线点点位中误差分布图
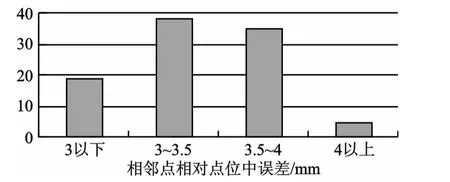
图8 相邻导线点的相对点位中误差分布图
4 高程控制网
4.1 布网方案
新选埋水准点38个,联测二、四号线水准点4个,城市二等水准点8个,三号线地面导线点1个,全网包括11个闭合路线和4个附合路线,如图9所示。
4.2 外业观测
采用Dini03电子水准仪按城市轨道交通一等水准网要求施测。共观测61个测段,水准路线往返测总长度为 190.6 km。经计算,测段往返测高差不符值最大为 2.8 mm(限差为 6.6 mm),附合路线和环线闭合差最大为 6.7 mm(限差为 12.7 mm),三号线水准网每公里水准测量高差中数偶然中误差 M∑为±0.35 mm(限差 ±1.0 mm)。
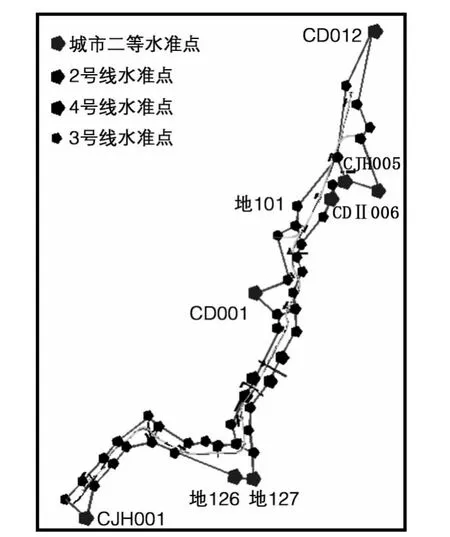
图9 水准网示意图
4.3 网平差
(1)已知点精度分析
固定CD001进行平差,采用Cosa进行网平差。平差后,高差全中误差为 ±0.24 mm(限差 ±2 mm)。将未固定的7个已知点高程与原高程较差(如表3所示),CJH005和CDⅡ006两点高程较差相对较大,地101、地127和地126三点高程较差较小。

7个已知点高程较差 表3
CJH001和CD012两点分别位于水准网两端,同时CD012—地101水准路线长度约 15 km,CJH001—地126水准路线约长度 16 km,这两段附合水准网闭合差远小于限差,故采用除CDⅡ006和CJH005两点外的其余6个水准点为网平差的已知点。
(2)严密平差
采用 CD001、CD012、CJH001、地101、地126、地127 等6个城市二等点的成都高程为起算数据进行平差计算。高差全中误差为±0.78 mm(限差±2 mm),最弱点高程中误差为±1.42 mm,相邻点的相对高差中误差最大值为±1.37 mm。图10为水准点高差中误差统计情况。
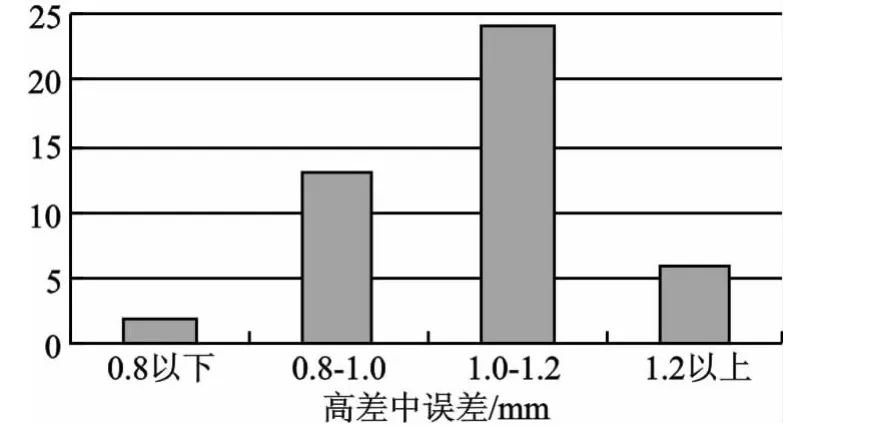
图10 高差中误差区间分布图
5 结论与建议
该项目作业规范、数据处理方法得当、结果准确,主要精度指标均满足规范和设计要求,为地铁三号线施工建立了测绘基准。
结合成都地铁三号线控制网布设情况,对城市地铁控制网布设提出了几点体会和建议:
(1)控制点布设
利用三维地图选点,加强与控制点所在建筑物业主的沟通,提高工作效率。
平面控制点尽量埋设房顶标石,适当增大平面控制点密度,增加通视方向,有利于控制点的保存和使用方便。高程控制点埋设于高层建筑主体,减弱地面沉降对水准点稳定性造成的影响。
(2)外业观测
选用先进仪器设备(如测量机器人),适当增加多余观测,减弱人为因素影响,确保观测成果可靠。
(3)数据处理
对已知点进行可靠性分析,选取精度一致的已知点进行网平差,保证成果精度和可靠性。
[1]GB 50308-2008.城市轨道交通工程测量规范[S].
[2]CJJ/T 73-2010.卫星定位城市测量技术规范[S].
[3]GB/T 18314-2009.全球定位系统(GPS)测量技术规范[S].
[4]GB/T 12897-2006.国家一、二等水准测量规范[S].
[5]CJJ8-99.城市测量规范[S].
