基于全自动全站仪的地铁隧道自动化变形监测系统的设计与实现
2014-06-29柏文锋
柏文锋
(广州地铁设计院研究有限公司,广东广州 510010)
1 引言
随着经济的发展和城市交通压力的加大,越来越多的城市开始兴建地铁,地铁的修建带动了其沿线的物业建设,而毗邻地铁的建筑施工尤其是深基坑施工,不可避免地对地铁结构安全产生影响。因此,对于地铁建(构)筑物进行变形监测,以确保其主体结构以及周边环境的安全是保障地铁正常运行、保障施工安全的重要环节。
对于目前已处于运营期间的地铁隧道结构变形监测内容主要包括区间隧道拱顶及道床的沉降、隧道管片的侧向位移及隧道结构的收敛变形等。运营隧道在地铁运行期间是不允许作业人员进入轨行区的,所以传统的人工作业模式无法保证监测的连续性,这就要求在地铁隧道中实施无人值守的自动化的变形监测[1~3]。
徕卡公司基于徕卡测量机器人开发的GeoMos变形监测系统是目前地铁变形监测中常用的自动化监测系统[4,5],国内的解放军信息工程大学、武汉大学等也针对国内的测量规范研制了远程自动化监测系统[6~8]。地铁监测行业的发展对自动化监测系统提出了更高的要求,针对越来越多的监测项目需求,广州地铁设计院研究有限公司与武汉大学合作开发了一套能够远程控制管理多项目的自动化地铁隧道变形监测系统。
2 系统结构
2.1 系统需求分析
广州地铁设计院研究有限公司目前正在运行的无人值守自动监测工作站有多个,随着测站的增多,工作站的压力逐渐增大,系统的稳定性的要求也日益增强,传统的“单任务,单测站”的模式已成为制约系统规模化的瓶颈。因此,建立一套能够对监测项目进行统一控制、管理的系统,减少工作站的运行负担,建立C/S(客户端/服务器)架构的自动化监测系统迫在眉睫。
基于工程项目中的实际情况及经验,对自动化地铁隧道变形监测系统提出以下需求:
(1)实现运营期间地铁隧道内变形监测数据的自动化采集;
(2)搭建便携稳定的数据服务器;
(3)通过无线通讯实现远程多项目多任务控制以及数据接收;
(4)组建C/S架构的自动化监测平台;
(5)变形监测数据的处理及分析;
(6)数据、成果的科学管理;
(7)图形报表的显示和输出,报告草稿的自动化生成。
2.2 系统总体架构
根据需求对系统架构设计如图1所示,系统由服务器(Server)、控制端(Controller)、客户端(Client)三部分组成,各部分之间通过因特网进行数据通讯。各部分具体设计如下:
服务器是数据的物理存储中心和控制端与客户端的网络交互平台,具有固定的IP地址,主要包括数据库、服务器管理软件以及通讯软件。控制端为任意安装了控制端管理软件的已联网电脑,通过互联网可以实现对监测现场设备的查询、控制以及查询、输出数据库中的监测记录、结果文件。客户端安装在地铁隧道监测现场,包括工控机、徕卡高精度测量机器人以及电缆、无线通讯装置等,用于完成变形监测数据的采集以及与服务器管理软件、客户端管理软件的通讯。
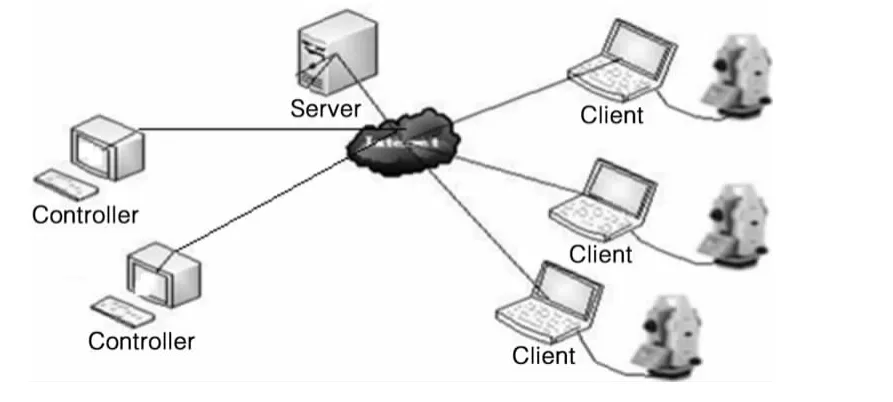
图1 系统总体架构图
3 系统的设计与实现
3.1 数据库设计与实现
本系统使用的数据库管理系统为SQL Server,针对数据库对不同项目以及项目数据信息的管理需求,将数据库设计为两个层次如图2所示:
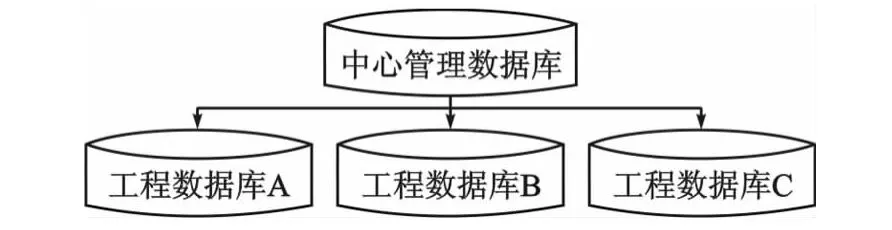
图2 数据库结构
中心管理数据库用来管理所有项目的基本信息,每个项目对应一个工程数据库,包括该项目的所有配置信息以及监测信息。数据库设计主要由工程表、用户信息表、异常登录信息表构成。
工程数据库用来管理每个工程项目的配置信息以及监测数据、结果,设计的数据表主要包含了工程中的配置信息以及工程中的监测数据信息。
3.2 数据通讯的设计与实现
根据系统的总体架构,客户端实现数据采集工作并发送给服务器,服务器端管理软件需接收来自不同的客户端的监测数据并上传至数据库中,同时控制端和服务器端管理软件还需对客户端的设备实现查询、控制,基于此设计了各部分之间的数据通讯模式如图3所示。
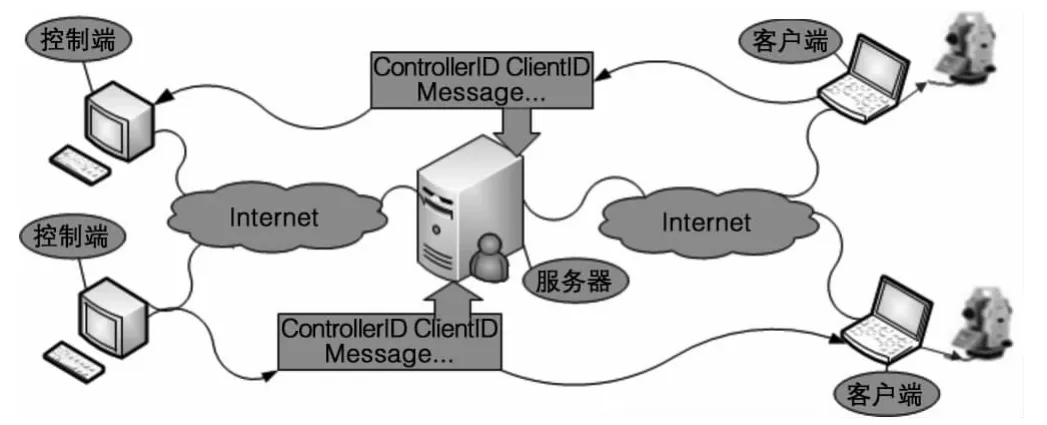
图3 系统各部分数据通讯模式
服务器具有固定的IP地址,各控制端、客户端具有唯一的标识ID,控制端、客户端主动连接服务器并定时发送心跳包,服务器实时获取更新各控制端、客户端的IP地址以及在线状态。
系统开发在Visual 2010的平台上采用Visual C#语言实现,数据通讯模块采用多线程实现。服务器端管理软件和控制端管理软件需要同时与不同客户端进行数据通讯,在程序启动阶段开启工作主线程和网络监听线程直到程序被退出,同时根据需要动态开启多个数据发送线程和数据接收线程。工作主线程完成的工作包括获取并更新系统项目中全部客户端设备的在线状态信息、检查各数据接收线程是否超时并完成超时处理、检查管理软件是否连接上服务器进行掉线自动重连等。网络监听线程实时监听,获取服务器发送过来的消息完成指令编译并做出对应的操作。
3.3 数据采集模块的设计与实现
数据采集方式采用方向观测法,根据《国家三角测量规范(GB/T 17942-2000)》方向法的操作顺序制定观测流程。观测限差根据《工程测量规范(GB50026-2007)》中平面控制测量、高程控制测量中的要求设置,同时用户也可以根据项目的需求自定义观测限差。采用单机版数据采集软件对监测点完成初始测量后,根据初始测量信息完成自动测量。同时由于运营隧道中行车间隔短,数据采集模块充分考虑目标被遮挡、测量超时等异常测量的智能处理。数据采集模块在Visual 2010的平台上采用Visual C#语言进行Windows组件开发,以服务的形式安装在工控机中,通过电缆线控制测量机器人完成监测数据的采集工作。
3.4 数据处理、报表输出模块的设计与实现
本系统目前采用的数据处理方法为根据基准点组的后方交会观测数据计算,测站坐标后采用极坐标法计算监测点坐标。考虑到目前主要工程项目中的设站类型,测站类型分为固定测站、平面固定测站、待判定测站和变化测站几种,根据测站类型和后方交会观测数据判断是否进行后方交会计算。同时充分考虑到地铁隧道变形监测范围狭窄以及地铁隧道变形特点增加方向基准点对基准点网形进行优化,提高后方交会计算测站坐标的精度。
报表输出模块使用NPOI控件开发,该控件直接读写Office格式文档,不需要在服务器上安装微软的Office,可以避免版权问题。报表生成采用向导模式输入必要信息之后自动生成,灵活方便,支持图片导入,生成的报表内容图文并茂。
4 工程应用
某工程基坑位于广州市越秀区中山一路和农林东路交汇处,基坑设二层地下室,采用钻(冲)孔桩基础,基坑周边总长度约 250 m;基坑开挖深度约 12 m,基坑四周环境比较复杂,且毗邻广州地铁一号线东山口至杨箕区间。由于基坑施工过程中的卸载、失水等必然引起隧道周边的环境的变化,环境的变化会对隧道结构产生影响,因此对隧道结构状况进行动态监测,对于指导信息化施工,保障地铁安全具有重大意义。
本项目采用上文所述的自动化监测系统,监测项目包括隧道结构体的拱顶沉降、隧道侧向位移等。监测点布于基坑施工可能造成影响的隧道部分区段,监测区域内以 10 m间距布设监测断面,各监测断面布点情况如图4所示。
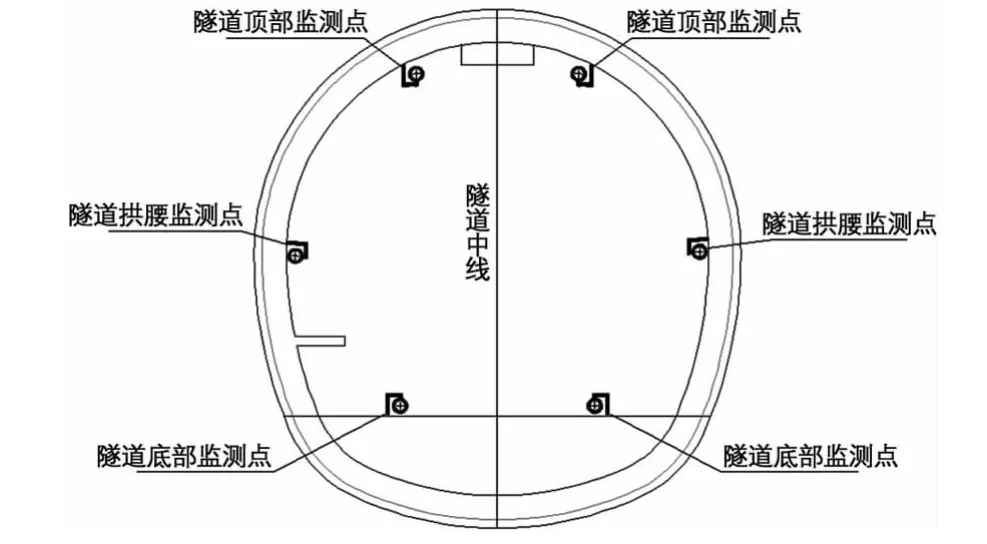
图4 隧道断面图
通过监测发现,某断面各测点Z方向(竖直方向)的变形过程线如图5所示。
通过上述过程线可以发现,在监测时段内,数据曲线变化平稳且呈逐步增长的态势,符合现场施工情况及原设计评估的变化规律。通过变化曲线可以看出,基坑施工对地铁隧道结构产生了一个逐步累积的不利影响,但本项目中整体影响较小。通过现场对隧道内观的检查,隧道结构情况良好,未出现裂纹、渗水等不良病害,并结合隧道日常运营维护监测的情况,两者反映的隧道结构情况也基本相符。
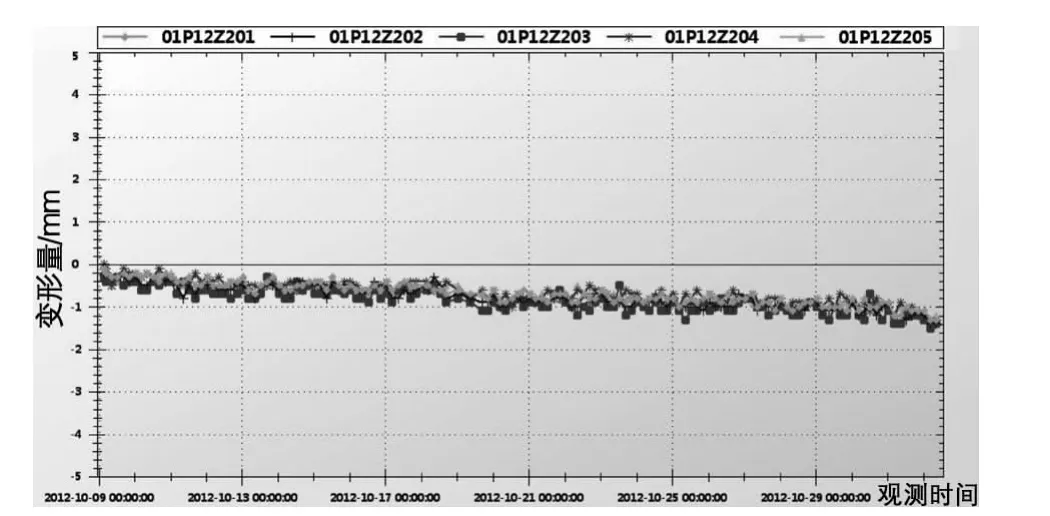
图5 某断面变形过程线
5 结语
本文介绍了结合现代化地铁隧道变形监测实际情况进行设计和开发的隧道结构变形自动化监测系统,设计了系统的整体框架结构,针对本系统多项目管理的特点,详细介绍了其数据库设计以及数据通讯模式。最后通过在广州某项目中的实际应用验证了本系统的实用性。
[1]包欢,徐忠阳,张良琚.自动变形监测系统在地铁结构变形监测中的应用[J].测绘学院学报,2003(6).
[2]范百兴.TCA全站仪实现测量数据的全自动化处理[J].北京测绘,2003(2).
[3]尤相骏,潘国荣,孙成刚.用GeoBASIC开发测量机器人机载程序[J].铁路航测,2002(1).
[4]张书华,蒋瑞波.基于测量机器人的隧道变形自动监测系统的设计与实现[J].测绘科学,2009(5).
[5]范百兴.GeoBasic开发TPS1100全站仪机载程序[J].四川测绘,2003(3).
[6]梅文胜,张正禄,黄全义.测量机器人在变形监测中的应用研究[J].大坝与安全,2002(5).
[7]黄腾,李桂华,孙景领等.地铁隧道结构变形监测数据管理系统的设计与实现[J].测绘工程,2006(12).
[8]梅文胜,张正禄,郭际明等.测量机器人变形监测系统软件研究[J].武汉大学学报·信息科学版,2002(2)
