近景摄影测量标志中心的自动提取算法
2014-05-10张永军
张永军,王 博,陈 奇,季 铮
(武汉大学 遥感信息工程学院,湖北 武汉 430079)
近景摄影测量中基本的摄影方式有正直摄影方式和交向摄影方式2种.正直摄影方式获取的数据具有匹配简单、解算成功率高等优点,但其缺点是精度控制较低;交向摄影方式获取的数据交汇角度大、精度控制高,但其缺点是处理难度大.在高精度的工程实践中,通常选用大倾角的交向摄影方式[1].在实际处理中,获取粗略的影像内、外方位元素是相对容易的,可进行实地量测解算,或在摄测坐标系下进行自由网平差解算,而获取精确的影像内、外方位元素,则需要进行含控制点的区域网平差解算[2].因此,在高精度近景摄影测量领域内,需要布设一定数量的测量标志,通过量取测量标志(一般为测量标志中心)的物方与像方位置,解算成像几何参数,以保证和提高测量精度和可靠性.测量标志在影像上具有较高的辨识度,通常与被测物体具有较为明显的反差.由于测量对象所处的复杂环境以及拍摄条件的限制,测量标志不仅在同一张影像上存在变形、辐射、灰度等差异,而且在交向摄影方式下,测量标志会出现在测区的大部分影像上,提取的工作量较大.在传统处理中,测量标志的量测一般采用人工量测或半自动交互式量测的方法.这些方法不仅大大降低数据处理的效率,而且受到人为主观操作因素的影响,会引入不确定的观测误差,给进一步的几何解算带来困难.孙鹏等[3]、黄桂平[4]解决了复杂背景下的圆形标志点自动识别和提取问题,但针对标志形状有所限制;李国胜等[5]在Canny算子的基础上进行边缘跟踪,实现了不定形标志的自动提取,但针对高精度的工程应用,该算法的成功率略显不足,无法达到平差处理的需求.
在实际工程处理中,Canny算子的自适应问题、标志边缘的确定问题以及标志中心的精确计算问题等均是算法设计的核心问题.在考虑经典算法和技术应用的基础上本文提出了一种不定形测量标志的自动提取算法,解决了上述核心问题.
该方法从近景严密几何模型解算出发,确定测量标志的像方坐标初值,构建局部自适应Canny算子进行边缘处理,并通过对称标志边缘聚类分析,实现标志边缘的自动重建,全自动化进行近景摄影测量标志中心提取,为区域网平差解算提供控制信息.其主要技术流程如图1所示.

图1 近景摄影测量标志自动提取技术流程Fig.1 The technology flowchart of automatic extraction with close-range photogrammetry flag
1 测量标志中心的像点坐标初值预估
近景交向摄影测量中通常利用相机的出厂内方位元素、多基线自由网定向参数及少量定向点完成粗略定向模型解算,从而得到粗略的影像内、外方位元素.测量构网的示意图如图2所示,采用近景多基线多视摄影测量的方法[6-8].图2a表示在同一测区分

图2 测量构网示意Fig.2 Measurement network

块内设定固定参考摄站2处(图中矩形表示)、辅助摄站若干处(图中圆形表示);图2b表示在同一摄站上进行多个方向摄影.
在像点坐标预测中,标志中心的物方坐标是通过全站仪实际测量得到的,影像的初始内方位元素选用摄影相机的出厂标定值,影像的初始外方位元素通过实际工程布设的控制设站信息得到.
当得到粗略影像内、外方位元素的情况下,根据像点、物方点与摄影中心(即影像内、外方位元素描述的空间点)三点共线的原理,利用共线方程式(式(1))进行空间后方交会解算可以求得物方的摄影测量标志中心在每张影像上的近似像点坐标.
式中:(xi,yi)是测量标志中心的像点坐标;(Xi,Yi,Zi)是测量标志中心在摄测坐标系下的坐标,即物方坐标;(f,x0,y0)是影像内方位元素;(Xs,Ys,Zs)是摄影中心在摄测坐标系下的物方坐标,即影像外方位线元素;(aj,bj,cj)是通过影像外方位角元素计算的旋转矩阵系数,j=1,2,3.
图3为北京故宫午门测量工程中利用上述方法预测测量标志中心的结果示意图.由于粗略内、外方位元素的误差以及测量标志本身的成像畸变,预测的初值并不准确,部分区域的预测偏差甚至无法落入标志成像区.根据预估点位能够划定标志提取的作业区域,但与测量标志具有类似纹理的成像物,如

图3 测量标志的预测结果示意Fig.3 The schematic diagram of the flag’s forecast results
墙上的条纹,会严重干扰处理,需要通过标志边缘的自动聚类剔除干扰边缘.
2 测量标志的局部自适应边缘提取
影像的边缘提取受到边缘粗糙程度、纹理结构以及影像噪声等多方面的影响.在摄影测量的影像处理技术中,大多数经典的边缘提取算法并不能取得较为理想的提取效果,例如Roberts算子、Prewitt算子、Sobel算 子、LOG 算 子 及 Canny算 子[9-11]等.很多学者从抗噪能力、边缘方向及阈值自适应等方面改进经典算子,取得了符合处理要求的提取效果.然而,提取算法在数据处理中的应用仍不具有普适性,需要根据实际情况进行调整.
从理论上说,边缘检测精度与算子抗噪能力这两者之间存在着相互制约的互变关系,即不确定准则.从信息处理角度看,这个原则可以表述为:一个信号不可能在时域和频域中任意高度集中,因而,边缘的定位精度和抗噪能力不可能同时无限提高,因此需要采用局部自适应边缘检测的方法解决这个矛盾.
测量标志在局部范围内与被测对象和其他地物具有较为明显的成像区别.利用标志中心的像点坐标初值,可以根据标志成像大小、预测精度及影像仿射模型,设定待提取标志的影像局部范围.如图4所示,预测点位可作为自由网像方的采样中心点,根据标志大小与预测精度可确定作业区大小,根据影像仿射模型可计算原始影像上的区域,即提取的作业区.

图4 测量标志提取的作业区示意Fig.4 The schematic diagram of flag extraction’s operation area
经典的自适应Canny算子通常需要在影像上进行复杂的直方图统计与模糊估计等,有些甚至需要一定的先验估计[12-14].考虑到标志中心提取过程中影像局部范围内像素数量较少,模糊统计或先验估计较为困难.本文引入Otsu算法[15]计算得到影像二值分割阈值,参照实际工程处理中的经验公式(式(2))计算得到Canny算子的双门限值,实现自适应的Canny算子.

式中:Th为Canny算子的高门限值,用于确定噪声与边缘;Tl为Canny算子的低门限值,用于连接边缘像素,使得提取边缘连续;Tg为影像二值分割阈值;a,b为较小的像素取值,避免在低辐射区和高辐射区发生双门限值取值异常.
局部自适应Canny算子的处理过程可以简单概括为三部分:一是通过高斯滤波函数进行影像平滑处理,即抑制噪声;二是通过自适应的高门阈值与平滑后影像做比较,记录边缘点,即提取边缘;三是在边缘点8邻域内迭代寻找大于自适应低门阈值的点,标记为边缘点,即边缘连接.
图5为北京故宫建筑测量工程中测量标志边缘提取的结果示意.由于测量标志的边缘提取结果会受到成像质量的限制,例如曝光瞬间测量标志的散射、摄影系统的随机噪声等,初步提取结果存在一些“伪边缘”或噪声,需要做进一步的处理,但初步提取结果总体上能够反映影像边缘位置.

图5 自适应Canny算子的提取结果示意Fig.5 The schematic diagram of adaptive Canny operator’s results
3 提取结果的自动聚类与边缘重建
自适应边缘提取结果中的“伪边缘”或噪声对提取人工标志的中心位置是不利的,采取进一步处理以精确获取边缘位置信息是必要的.
考虑到近景摄影测量标志均具有对称性,采用基于迭代自组织数据分析(iterarive self-organizing data analysis technigues A)的对称聚类思想[16],根据标记边缘的像素值进一步处理边缘提取的结果,重建边缘并计算标志中心的精确位置,达到测量标志自动提取的目的.算法具体步骤如下:
(1)对于边缘提取结果进行标记,取标记像素的原始影像像素值,从而确定局部聚类分析的数据集合.
(2)根据初始聚类参数进行迭代自组织数据分析,其中包括初始聚类中心数K、单类别的最少样本数θN、各类别的样本标准差阈值θS、聚类中心的距离阈值θC(也称归并系数)、允许迭代的最多次数I及聚类中心XN.
(3)在迭代分析过程中,对每次迭代产生的类别进行合并,剔除数量极少的类别,标记筛选得到参与下次迭代的样本数据集合.
(4)同时,根据聚类结果重新计算下一轮的聚类参数,包括K,θS,θC.最大限度根据样本区的数据分布情况进行聚类分析,从而确保标志边缘与干扰边缘尽可能的分离.
(5)若迭代结果出现多个类别,则说明标志内含有与测量标志同量级的干扰物,根据标志的大小、形状和对称性可以剔除干扰物;若迭代结果只有一个类别,则该类别的聚类中心可以作为标志中心的初始位置,记为C.
(6)统计C到保留样本的距离,截取置信区域的样本作为边缘的离散采样数据,根据边缘连接算法,即分段式多边形拟合,重建标志边缘.
(7)由于标志的投影及影像噪声的影响,重建的边缘所组成的图形一般是不规则的多边形,此时,求取多边形的最大外接圆的圆心作为标志中心.
4 试验及分析
选用北京故宫午门与武汉大学校园升旗台近景(如图6、图7)摄影测量的真实数据进行试验.

图6 故宫试验区示意Fig.6 The quick view of the Forbidden City Block
故宫试验区影像40张、控制测量标志15个、检查测量标志51个,影像重叠度达90%,升旗台试验区影像147张、控制测量标志9个、检查测量标志6个,影像重叠度达95%.利用本文方法进行测量标志中心的像方坐标初值预估,绝大部分预测点位落在标志的附近,极少数预测点位偏离标志较远(在平差解算中可发现并定位);利用标志中心的预估值选取边缘提取的作业范围,进行局部自适应边缘提取与自动聚类,重建测量标志的边缘,如图8所示,最后精确计算测量标志中心像方坐标,如图9、图10所示,十字丝对应标记的点位为标志中心点.

图8 标志边缘重建结果示意Fig.8 The reconstruction of mark edges
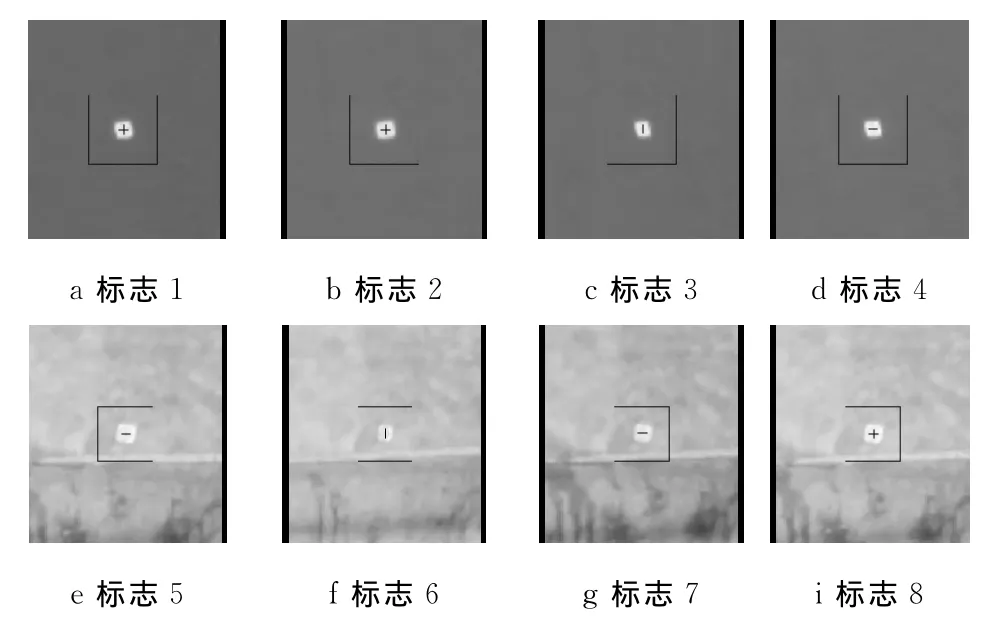
图9 故宫试验区结果示意Fig.9 The results of the Forbidden City Block

图10 升旗台试验区结果示意Fig.10 The results of Flag Station Block
利用上述算法进行自动化提取测量标志中心,限于成像噪声和算法的局限性,边缘重建的结果本身是有误差的,但基本反映了真实边缘;取重建边缘的最小外接圆计算得到的圆心坐标即为标志中心坐标.提取结果加入近景摄影的大区域光束法平差解算,其中控制点与检查点精度统计如表1、表2所示.
精度统计结果表明,自动提取的标志中心,即控制点具有较高的精度,经光束法平差之后,检查点精度可以达到毫米级.对于自动量测的控制点和检查点,对比人工量测的结果,在像方x和y方向上相差的平均值均优于0.5个像素,证明自动提取算法能够达到人工干预的处理精度,符合高精度的近景摄影测量要求.

表1 故宫试验区精度统计Tab.1 Accuracy statistics of the Forbidden City Block

表2 升旗台试验区精度统计Tab.2 Accuracy statistics of Flag Station Block
实际工程数据的试验表明本文提出的方法简单有效,适用于近景摄影测量处理中测量标志信息的全自动提取.
5 结语
从工程实践的角度出发,利用摄影测量原理进行点位预测,设计了标志中心提取算法,包括自适应提取标志边缘、聚类分析边缘提取结果,最后精确计算标志中心点坐标,在武汉大学校园升旗台与北京故宫午门建筑近景测量试验中取得了比较理想的效果.该算法能够有效进行近景摄影测量的相关处理,在大重叠度、精度控制要求高的摄影测量处理中具有应用前景.
目前,该方法已经应用于多个近景拍摄的测量工程处理中,大大减少了标志坐标量测的工作量,提高了生产处理的效率.
[1] 冯文灏.近景摄影测量——物体外形与运动状态的摄影法测定[M].武汉:武汉大学出版社,2002.
FENG Wenhao.Close-range photogrammetry:photographic determination of object shape and motion state[M].Wuhan:Wuhan University Press,2002.
[2] 李德仁,郑肇葆.解析摄影测量学[M].北京:测绘出版社,2002.
LI Deren, ZHENG Zhaobao. Analytical photogrammetry[M].Beijing:Surveying and Mapping Press,2002.
[3] 孙鹏,吕乃光,王博恩,等.视觉测量中圆形标志点的全场自动识别和提取[J].北京信息科学大学学报:自然科学版,2011,26(3):91.
SUN Peng,LÜ Naiguang,WANG Boen,etal.Automatic recognition and extraction of circle marked point in full images of photogrammetry[J].Journal of Beijing Information Science and Technology University,2011,26(3):91.
[4] 黄桂平.圆形标志中心子像素定位方法的研究与实现[J].武汉大学学报:信息科学版,2005,30(5):388.
HUANG Guiping.Center subpixel local ization of circular retro-reflective targets[J].Geomatics and Information Science of Wuhan University,2005,30(5):388.
[5] 李国胜,林宗坚,任超锋,等.相机检校中标志点的自动提取[J].测绘科学,2005,35(6):161.
LI Guosheng,LIN Zongjian,REN Chaofeng,etal.Autoextraction of mark points on camera calibration[J].Science of Surveying and Mapping,2005,35(6):161.
[6] 张祖勋.数字摄影测量与计算机视觉[J].武汉大学学报:信息科学版,2004,29(12):1035.
ZHANG Zuxun.Digital photogrammetry and computer vision[J].Geomatics and Information Science of Wuhan University,2004,29(12):1035.
[7] 张祖勋.论摄影测量与工程测量的结合[J].地理空间信息,2004,2(6):1.
ZHANG Zuxun.Integration of photogrammetry and engineering surveying [J].Geo-spatial Information,2004,2(6):1.
[8] 张祖勋,杨生春,张剑清,等.多基线数字近景摄影测量[J].地理空间信息,2007,5(1):1.
ZHANG Zuxun,YANG Shengchun,ZHANG Jianqing,etal.Multi-baseline digital close-range photogrammetry[J].Geospatial Information,2007,5(1):1.
[9] Marr D,Hildreth E.Theory of edge detection[C/CD]//Proceedings of the Royal Society of London.London:[s.n.],1980:187.
[10] Canny J.A computational approach to edge detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1986,8(6):679.
[11] 严国萍,戴若愚,潘晴,等.基于LOG算子的自适应图像边缘检测方法[J].华中科技大学学报:自然科学版,2008,36(3):85.
YAN Guoping,DAI Rouyu,PAN Qing,etal.Adaptive approach to image edge detection by Laplacian of Gaussian operator[J].Journal of Huazhong University of Science &Technology:Natural Science Edition,2008,36(3):85.
[12] 余洪山,王耀南.一种改进型Canny边缘检测算法[J].计算机工程与应用,2004,40(20):27.
YU Hongshan,WANG Yaonan.An improved Canny edge detection algorithm [J].Engineering and Application of Computer,2004,40(20):27.
[13] 韦海萍,赵保军,唐林渡,等.Canny算法的改进及其硬件的实现[J].光学技术,2006,32(2):263.
WEI Haiping, ZHAO Baojun, TANG Lindu,etal.Improvement of Canny algorithm and implementation in hardware[J].Optical Technique,2006,32(2):263.
[14] 李牧,闫继红,李戈,等.自适应Canny算子边缘检测技术[J].哈尔滨工业大学学报,2007,28(9):1002.
LI Mu,YAN Jihong,LI Ge,etal.Self-adaptive Canny operator edge detection technique[J].Journal of Harbin Engineering University,2007,28(9):1002.
[15] 梁今明,魏正曦.Ostu算法的改进研究[J].四川理工学院学报:自然科学版,2010,23(5):543.
LIANG Jinming,WEI Zhengxi.Research on improvement of the Ostu algorithm [J].Journal of Sichuan University of Science &Engineering:Natural Science Edition,2010,23(5):543.
[16] 舒宁,马洪超,孙和利.模式识别的理论与方法[M].武汉:武汉大学出版社,2004.
SHU Ning,MA Hongchao,SUN Heli.The theories and methods of pattern recognition [M]. Wuhan: Wuhan University Press,2004.
