清洁机器人与智能手机远程监控相结合的应用研究
2014-02-28马芷蔷郭晨阳
陈 俊,马芷蔷,郭晨阳
(1.安徽机电职业技术学院电气工程系,安徽芜湖 241000;2.海军安庆市职业技术学校,安徽安庆 246016;3.合肥学院电子信息与电气工程系,安徽合肥 230601)
随着网络技术和智能掌上设备技术的成熟,从多功能集成发展的角度,提出通过智能手机借助无线wifi实现对清洁机器人的手控功能.并且,由于清洁机器人具有每天即便在家中无人的情况下,定时准点工作数小时的规律(这里无需实现24小时报警,主要是针对白天家中无人时),通过它结合传感器技术实现对家庭温度、湿度以及烟雾的监控,并在有危险情况发生时向手机发出警报,从而提升家庭安全保障.
1 系统框架设计
选用P89V51RD单片机为系统核心,控制电机驱动,实现手动控制时扫地机器人的前后左右4个方向的运动和停止功能.配备温湿传感器SHT75和光电式烟感器,实现对环境情况进行监测,并将实时数据发送给单片机进行分析.若超出正常值,将通过无线wifi向手机发出警报.整体设计框架如图1所示.

图1 系统框架
基于本系统的功能要求和实用性角度考虑,选择P89V51RD作为控制系统的核心,由于需要实现手动控制,所以需要对小车两个后轮进行驱动,选用L298N可以实现电机正反转调速,它具有良好的起动性能,可同时驱动两台直流电机,非常适用于这里的设计,驱动原理图如图2所示.这里,VSS接+5V为L298内部工作电源,VS接+12V供给电机,续流二极管用于吸收由负载电感造成的反峰,对L298进行保护,防止被烧坏.J11,J12可用跳线进行选择性连接,电机M1可用P1.4或P4.3控制,电机M2可用P1.3或P4.2控制.
无线传输方面,选择USR-WIFI232-T串口转wifi模块,可实现串口与无线wifi之间的双向透明通信,内置TCP/IP协议,小巧实用、功耗低,速率可达150M,一般家庭完全可实现全覆盖.对温湿度的检测方面,选用温湿传感器SHT75,包括一个电容性聚合体测湿敏感元件和一个用能隙材料制成的测温元件,在同一芯片上与A/D转换及串行接口无缝连接,输出全标定的数字信号,稳定可靠.烟雾传感器包括离子式和光电式两种,离子式烟感器对熊熊大火较为敏感,而光电式烟感器对于“闷烧”更为敏感,鉴于本系统主要用于家庭环境,故这里选择MQ-2光电式烟雾传感器.
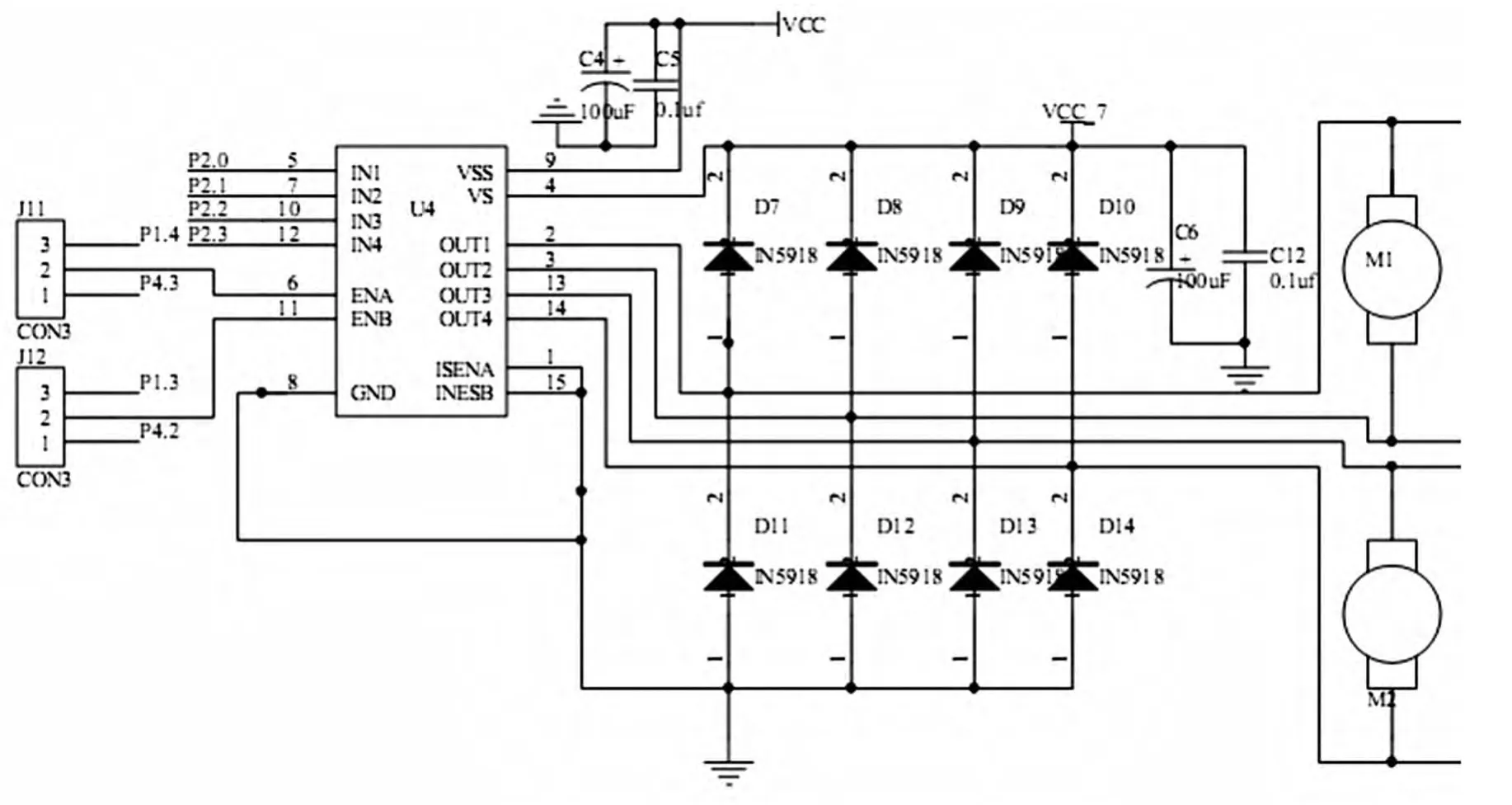
图2 L298驱动直流电机原理图
2 小车运动算法控制
小车在不同的环境下,无论是自主运行还是手控运行,均存在着轮速误差的问题.特别是在运动速率较高时,若不加以控制,会出现跑偏或与定位目标距离相差太大的情况.若仅以编码器对轮速进行监测反馈,实现反馈控制,对运行算法的要求自然就提高,否则可能会使车身由于不断纠错而出现“抖动”前行,行进效果如图3a所示.基于此,我们在小车运行过程中结合粒子群算法对PID参数进行优化整定.实现PID输出适配器由一个值同时控制两边电机的正反转,由pwm输出值的大小决定轮速,并且经过试验,去除了pwm相对较小的值,以避免出现由于输出力矩过小,小车无法行进的情况.
将PID控制中的参数(Kp,Ki,Kd)作为PSO中的一个粒子的位置Xi,将PID控制器的参数整定问题转化为了三维的PSO算法问题,如公式(1)所示.而后,定义一个性能指标作为目标函数,用于评价PSO算法中粒子个体的适应度.

这里,使惯性权重w自0.5向0.1递减,从而提高收敛速度.r1和r2是处于0和1之间的随机二维向量.c1和c2为自学习以及群学习因子.在一定采样时间内,选取足够多的个体,用性能指标评估每个个体的适应度,选定适应度大的作为PID控制参数.加入结合PSO的PID算法后,“抖动”问题得到顺利解决,其行进状态如图3b所示.以此方式,尽管工作周边环境可能产生变化并带来影响,小车也可在最快时间内调整好参数,实现轮速的精确控制,从而实现小车的自适应运行,提高其稳定工作能力.软件设计流程如图4所示.

图3 加入PSO&PID算法前后小车行进状态对比图
3 Android平台下的软件设计
Android是一种基于Linux的自由及开放源代码的操作系统,主要使用于移动设备,并且逐步扩展到电视、数码相机和游戏机等领域.它是一个完全开放的平台,能支持种类极其丰富的多种硬件,为APP开发者提供了宽泛自由的环境.本项目设计中,基于java语言下,运用eclipse软件编程,编辑的界面包括:1个activity,1个实现手动和自动运行切换的switch,4个控制上下左右4个方向的button以及3个imageview.当点击button时,触发方向控制事件,通过调用wifi控件,向已经配对好的设备发ASCII码,从而实现对清洁机器人的手动控制;相应的,在机器人自主运行过程中,如果设备传感器接受到温度、湿度或烟雾的触发信号,可由单片机通过串行口转wifi模块向手机报警,当手机接受到数据时,可以自动改变报警图标的效果.这里有两种方法可以实现,一种是用imagebutton,当收到数据时自动按下图标,使颜色发生变化,第二种是imageview,当收到数据时,变换图标触发imageview模块,使正常下的白色imageview替换成红色,这里选用imageview,界面设计如图5所示,包括了软件进入后手动与自动控制切换的界面.
清洁机器人上的wifi模块,是在上位机进行设置的,当工作地点变更、wifi环境改变时,只需借助串口调试助手,对wifi和密码进行重新设置即可,手机wifi连接方式和平时连接wifi方式一样,其他部分都不用做特殊的更改,具有较好的灵活性.

图4 软件设计流程图
4 实验调试
这里报警功能的设计是基于清洁机器人每天工作数小时的固定规律,及其运作过程中对整个家庭的相对较广的覆盖面.并且,现在家居中的无线wifi基本上都是全天工作的,这就为清洁机器人在家中检测到安全问题时向主人的手机发出警报提供了基本途径的保障.清洁机器人一般是双电机驱动,搭配一个万向轮实现全方位自由移动和转弯.这里,以自行设计的与清洁机器人运动原理一样的小车为实验平台,验证本方案的实施效果.小车实物图如图6所示.
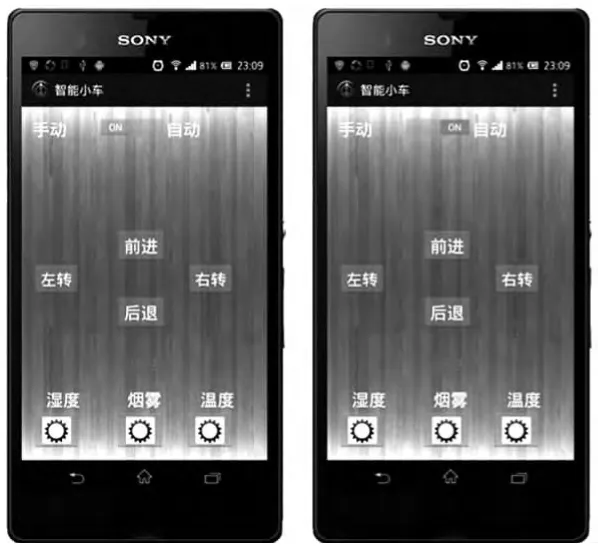
图5 手机手自动切换演示界面
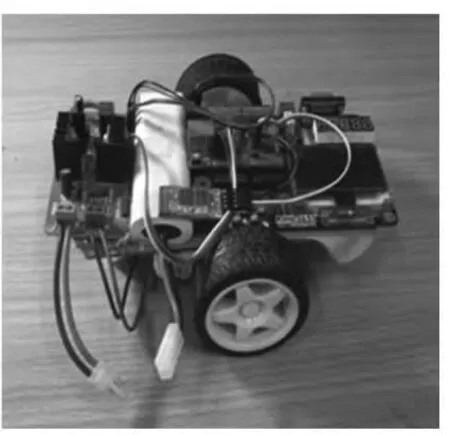
图6 仿清洁机器人小车平台
4.1 传感器数据处理
SHT75温度检测范围是-40℃~+123.8℃,分辨率0.01℃;湿度检测范围是0至100%RH.当SHT75检测到周边温度上升时,其读出的温度值并非实际环境温度,而是传感器自身加热后的温度,且此温度一般高于环境5~10℃.SHT75由能隙材料PTAT研发,正比于绝对温度,具备极好的线性.基于此,其温度输出转换如公式(2)所示.

这里,T是转换后得到的实际温度值,t1和t2为温度转换系数,分别取值-40.1和0.01.
居室里比较舒适的相对湿度应控制在40%~50%,当湿度高于65%或者低于38%时,不仅人体会感到不适,细菌繁殖加快,且对家居环境的各类电器会产生危害,甚至绝缘故障,所以湿度的控制也需予以重视.相比于温度的极好线性能力,由于实际温度与测量参考温度(25℃)会有明显差异,故SHT75的相对湿度输出呈现一定的非线性,如图7所示.SHT75的输出湿度对温度依赖性较大,对电压基本无依赖性,故仅需考虑实际环境温度因素对湿度信号作温度补偿即可,补偿方法如公式(3)所示.Tt为实际环境温度,SDOT为实际传感器读出值.这里主要用于预警,故在调试好阈值后,完全可以达到测试灵敏度要求.

选用光电式烟雾传感模块置于清洁机器人上,适于检测家庭火灾中易出现的“闷烧”,这里要说明的是,家用燃气一般包括天然气、城市煤气和液化石油气3大类,这里由于扫地机器人的工作高度较低,只能针对气体密度重于空气的液化石油气进行监测,而相对较轻的天然气和煤气,若需检测,可在厨房距离天花板50公分左右位置安装无线联网烟感器.
只有在清洁机器人处于自动运行状态时,传感器的监测功能才予以启动,手动状态下无需监测功能.在传感器启动监测功能后,将传感器的输出信号发送至单片机处理,预先设定好各传感器阈值,通过中断方式进行处理对比.若属于正常范围,则不发送任何信号,一旦有突破阈值的情况,则根据中断类型激活报警程序,通过无线wifi向手机发送警报.

图7 SHT75相对湿度输出转换关系图
4.2 实际测试
为满足烟雾传感器测试要求,我们选用打火机为测试道具.打火机中的气体以丁烷为主,重于空气,适于对小车传感器和报警能力进行测试.先手动控制小车至打火机下方,切换手动控制为自动运行,与此这时,小车启动传感检测功能,在烟雾传感器检测到丁烷气体且达到阈值后,向手机发出烟雾报警;同样的,将打火机点燃逐步靠近小车,温湿度传感器在检测到温度变化,并达到阈值后,会向手机发出温度报警,手机测试效果如图8所示.
5 结论
本文尝试在清洁机器人的基础上增添温湿传感器和烟雾传感器,利用清洁机器人每天规律化的工作机制,实现在家中无人时的安全监控,借助无线wifi模块实现手机与机器人之间的双向通信.经过20次实验,通过对气体源和温度源位置的不同变换,测试其警报灵敏度,成功率达到90%.结果表明,此初步设计方案可行,实用潜力较大,在未来清洁机器人产品的设计生产中具有较好的应用前景.
[1] Goldberg K,Gentner S,Sutter C,et al.The mercury project:A feasibility study for internet robots[J].Robotics &Automation Magazine,IEEE,2000,7(1):35-40.
[2] Bardella A,Danieletto M,Menegatti E,et al.Autonomous Robot Exploration in Smart Environments Exploiting Wireless Sensors and Visual Features[J].Annals of Telecommunications Des Tele-communications,2012,67(7-8):297-311.
[3] 邱实.服务机器人远程控制关键技术研究[D].哈尔滨:哈尔滨工业大学,2010:17-22.
[4] 蒋薇.机器人远程控制的研究与应用[D].北京:北方工业大学,2007:21-22.
[5] 熊光辉.基于Android平台手机远程监控系统的设计与实现[D].成都:电子科技大学,2012:34-40.
[6] 张琨.基于Android平台的WLAN解决方案[D].济南:山东大学,2010.
[7] 许恩江,李合增,刘金河,等.智能服务机器人在家庭安防中的核心技术初探[J].兵工自动化,2010,29(9):88-89.
[8] 陆建飞,赵福臣.基于Internet的机器人遥操作研究[J].机械工程师,2008(8):119-121.
[9] 李瑞峰,顾义坤.基于GSM/GPRS网络的家用机器人远程监控系统设计[J].制造业自动化,2006,28(10):71-74.
[10]李琴,陈立定,任志刚.基于Android智能手机远程视频监控系统的设计[J].电视技术,2012,36(7):134-136.
