The Study of Stability Control Based on the Yawing Moment of Electric Vehicle
2013-12-07DUANMinYINGShimingZHANGHongshuang
DUAN Min, YING Shiming, ZHANG Hongshuang
Liaoning University of Technology, Jinzhou 121001, China
TheStudyofStabilityControlBasedontheYawingMomentofElectricVehicle
DUAN Min*, YING Shiming, ZHANG Hongshuang
LiaoningUniversityofTechnology,Jinzhou121001,China
Basedonthedirectyawmomentcontrolmethod,thisstudysetsupa7Dofvehiclemodelandanidealvehiclemodel,andthestabilitycontrollerwithfuzzylogiccontrolmethodsisadoptedtoimprovethevehicleyawstability.Thevehiclemodelissimulatedindifferentconditions,andtheresultsshowthatthecontrolleriswithoutcontrolofthevehicleandcompared,theyawrateandsideslipanglesteady-statevaluesettheoutputisreduced,andimprovethestabilityofthevehicleyaw,throughtheanalysisandtestingofthiscontrolstrategyiseffective.
yawstability,fuzzy-logiccontrol,yawmoment,simulationanalysis
1.Introduction
At present, the control methods of the vehicle stability mainly have two kinds. For car center of mass slip angle control. Through the center of mass of car slip angle for control, let the car in a certain range of changes to ensure its stability[1]. Through the following an ideal vehicle in the place of the angular velocity method. That is a driver make an ideal yaw angular velocity, when the practical and ideal yaw angular velocity of the vehicle have certain deviation, exert control of vehicle, so as to ensure the stability of the electric car [2-3]. In order to ensure the stability of the car, so the use of advanced control method to achieve the stability of the vehicle control and improve, According to the proposed control strategy calculated stable driving vehicle to the compensation yawing moment.
2.The mathematical model of the vehicle
The United States University of Michigan established 17 degrees of freedom model car is very typical, currently domestic set up a relatively perfect vehicle model is 12 degrees of freedom. In view of the importance of the model, this research chose seven freedom vehicle models, in the modeling ignoring the torsion vibration and shimmy of the car. The model includes the car’s lateral movement, longitudinal motion and around theZaxis horizontal motion and four wheel rotation seven degrees of freedom. The dynamic equation is as follows:
Vehicle longitudinal force balance equation:
(Fy1+Fy2)sinδ+Fx3+Fx4
(1)
Vehicle lateral force balance equation:
(Fy1+Fy2)cosδ+Fy3+Fy4
(2)
Vehicle around the Z axis moment balance equation:


(3)
Vehicle of the four wheels moment balance equation:

(4)
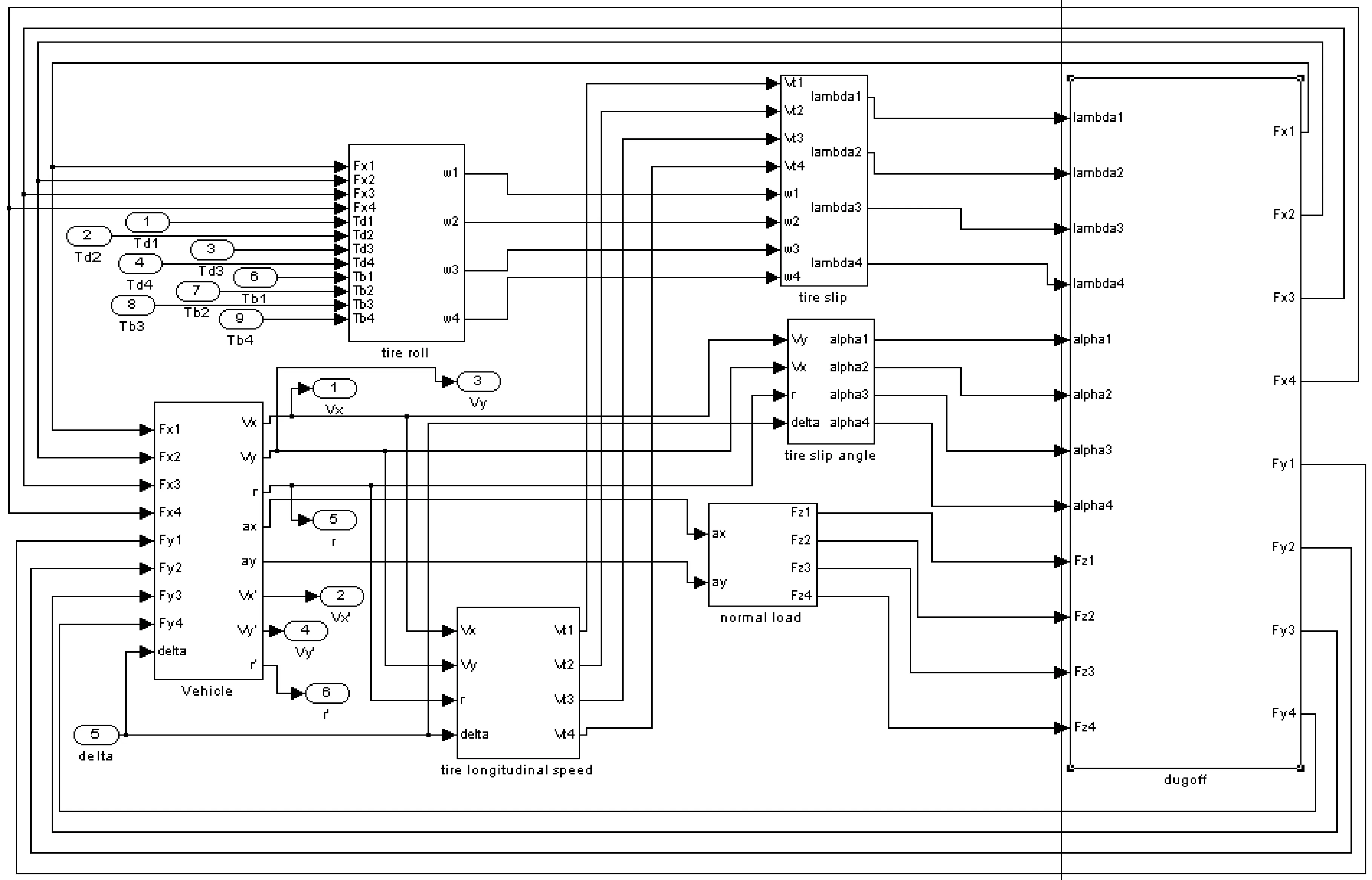
Fig.1 7-DOF vehicle mode
3.The ideal mathematical model of vehicle
The electric car in the adhesion coefficient of the high road surface with smaller acceleration turn, the pilot of the handling characteristics can be used to describe the monorail model. Because at this time the vehicle’s handling characteristics is in the driver’s control range, close to the ideal, car is in stable condition. Therefore, the ideal linear two 2-DOF vehicle model is regarded as the main aim of the car stability control, vehicle dynamics control target mainly has the expectations of the car slip angle and yaw angular velocity[5].
Based on the linear 2-DOF model car the yaw angular velocity of a calculation method.The electric car model of the dynamic equation:
(5)
(6)
4.Stability control strategy
4.1.Thevehiclestabilitycontrolstructure
Based on the hierarchical control allocation algorithm drive control structure, this controller contains motion controller and control distributors. Motion controller is in the controller up level, according to the driver’s instructions; the reference model calculation the driver expected force and vehicle stability’s yawing moment value. Controller distributor is in the vehicle controller low level, according to the upper input the driving force and longitudinal yawing moment, according to the control target and constraint conditions will be assigned to four wheel driving force.
4.2.Yawingmomentcontroller
The two input single output control system structure, respectively slip angle input error, the yaw angular velocity error, output for vehicle stability of compensation yawing moment, such as Eq.(7), (8).
e(β)=β-βd
(7)
e(γ)=γ-γd
(8)
According to membership functions of setting the rules, choose the triangular membership method, were developed the yawing moment of input and output variables of the controller of membership functions.
The input variables of the fuzzy controller aree (β) ande(γ), basic range are [-0.12,0.12] and [-5°,+5°].Output variable isMzf, basic range is [-3 000,+3 000]. Display range is [-1,+1].
Input language variable fuzzy subsets are {NB,NM,NS,ZE,PS,PM,PB},the output variables of fuzzy subsets of language are {NVB,NB,NM,NS,ZE,PS,PM,PB,PVB}.
Fuzzy controller using if-then rules form of statements of Mamdani fuzzy inference system, the control rules as is shown in Tab.1.
Tab.1 fuzzy logic control rules form
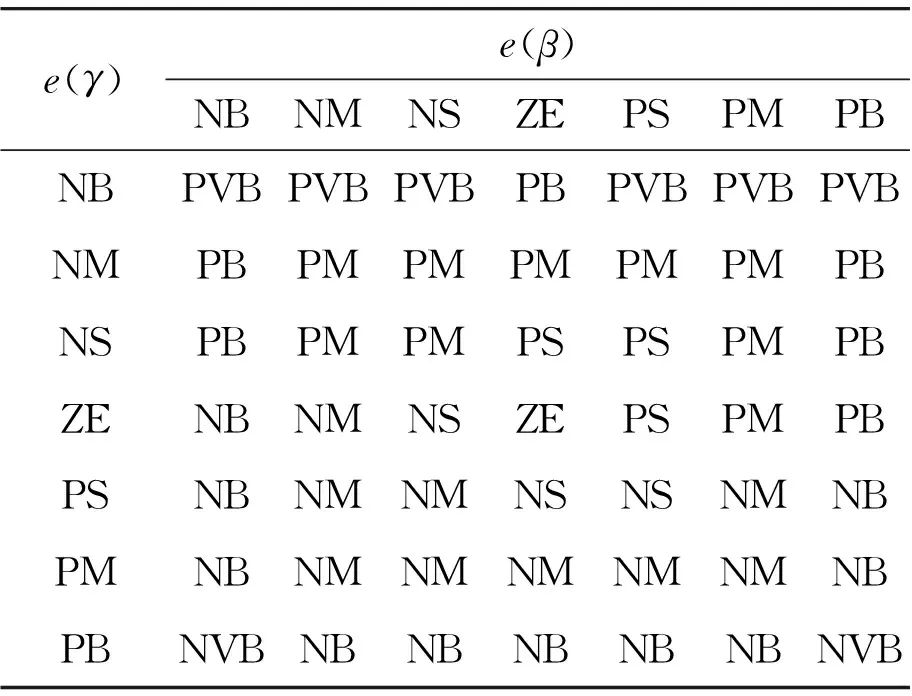
Fig.2 is the output of the controller for the stability of the yawing moment 3 d view.
Fig.2 Output yawing moment 3 d view
5.The simulation results of the analysis
In order to validate whether the electric car’s yawing moment controller is stable, based on the establishment of the 7-dof vehicle simulation model, combined with Matlab/Simulink software, analysis the electric car’s stability in different limit conditions.
1) Vehicles in adhesion coefficient are 0.8 road surface with 30 km/h driving speed, the steering wheel to step input operations. Fig.3, 4 means the controlled vehicle or not in the yawing moment controller control simulation results.
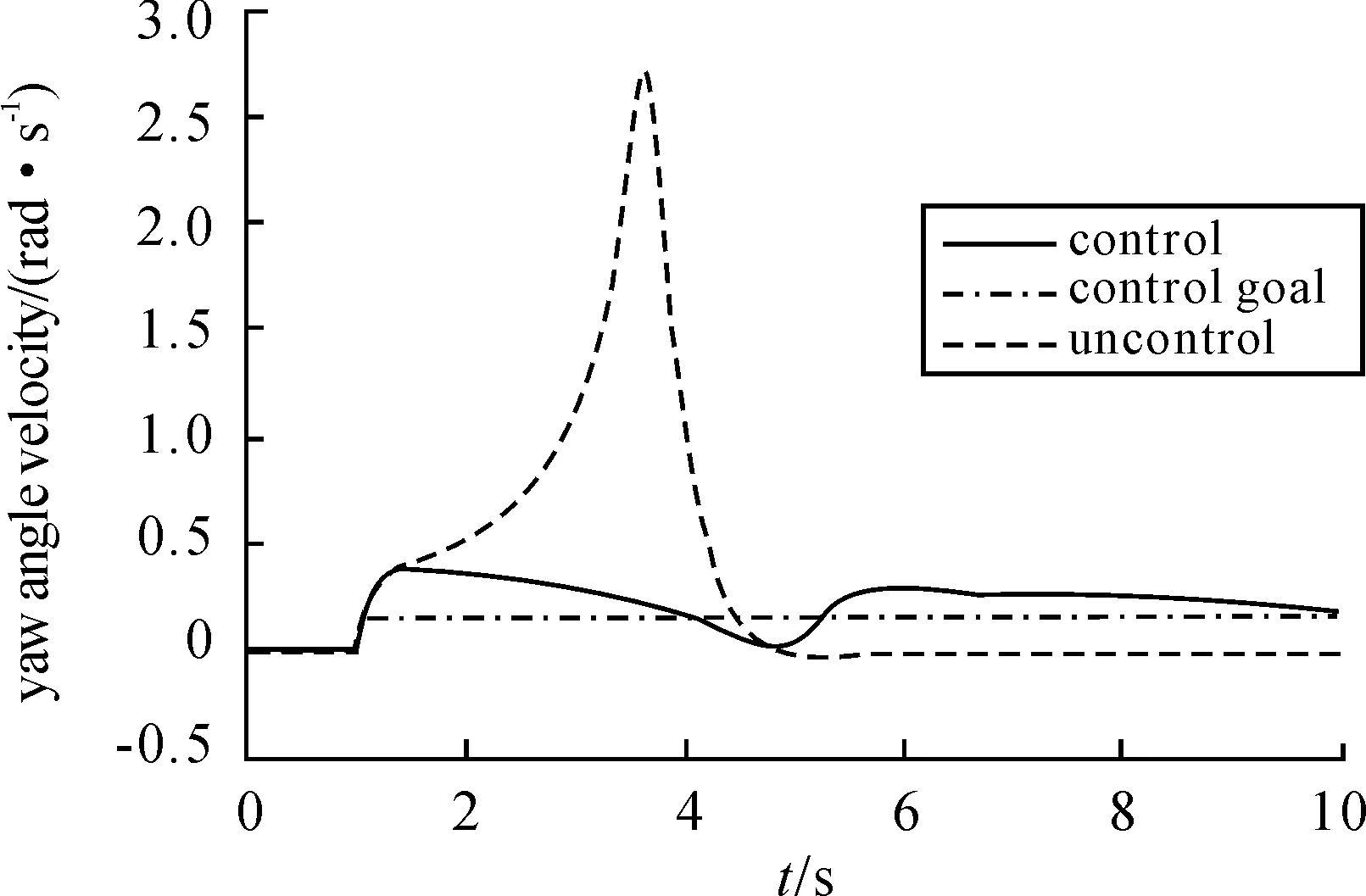
Fig.3 yaw angular velocity control results
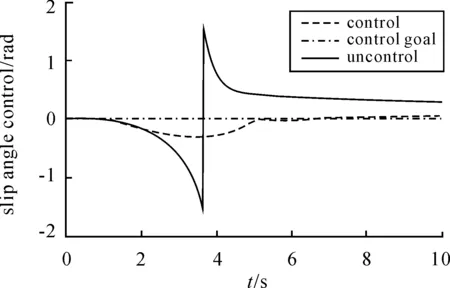
Fig.4 slip angle control results
The Fig.3、4 show that: The yaw angular velocity of a vehicle which has a controller can expect a direction angular velocity according to the road, without controller’s vehicle’s yaw angular velocity change a lot. Without the control strategy of the electric car slip angle and ideal deviation is very large, there electric vehicles slip angle under the action of the compensation yawing moment and expectations of deviation variety range is very small, the vehicles have been stable state.
2) Vehicles in adhesion coefficient are 0.8 road surface with 30 km/h driving speed, the steering wheel in sine input operations. Fig.5,6 said that whether the simulation results used the controller or not.
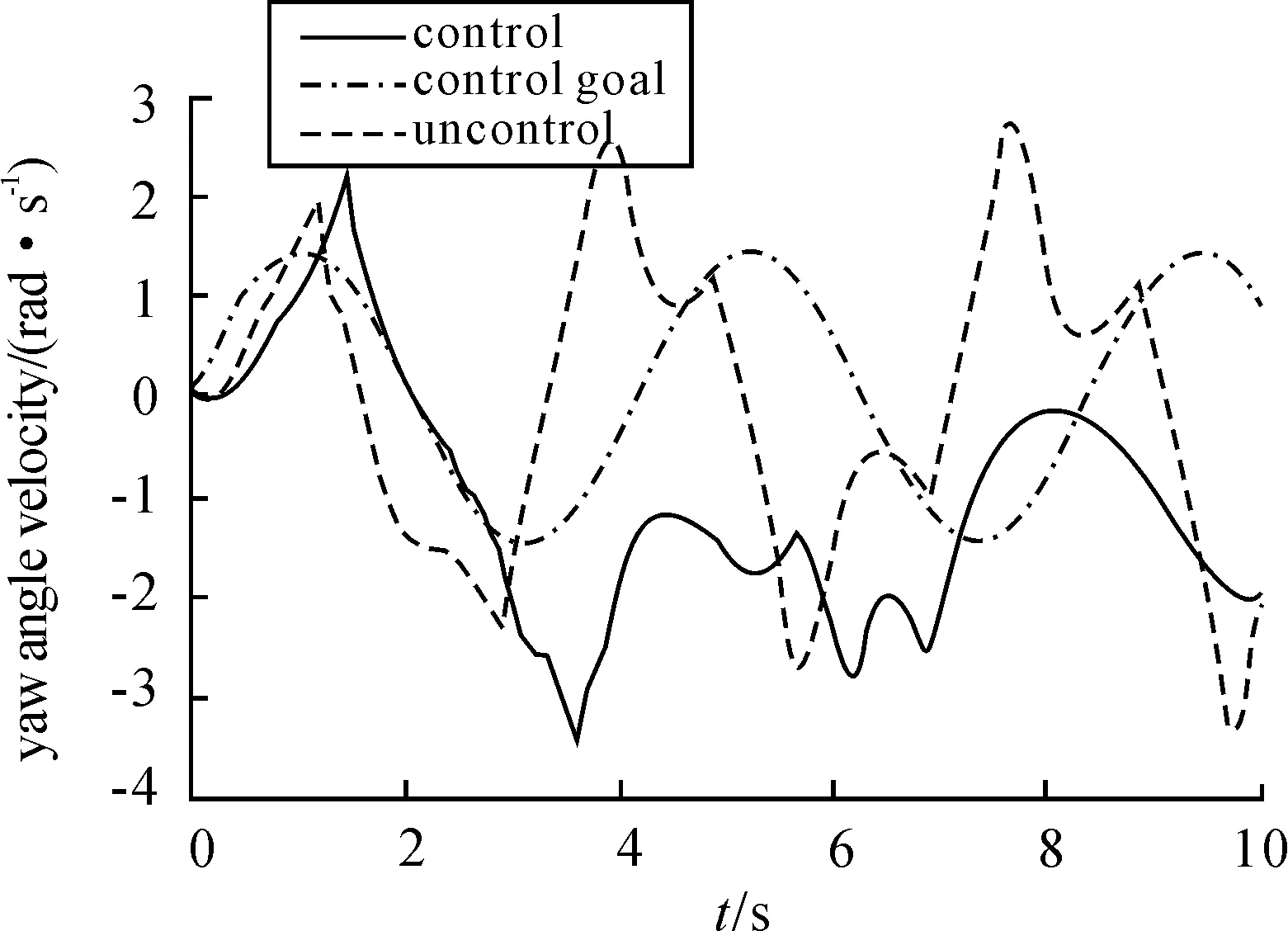
Fig.5 yaw angular velocity control results
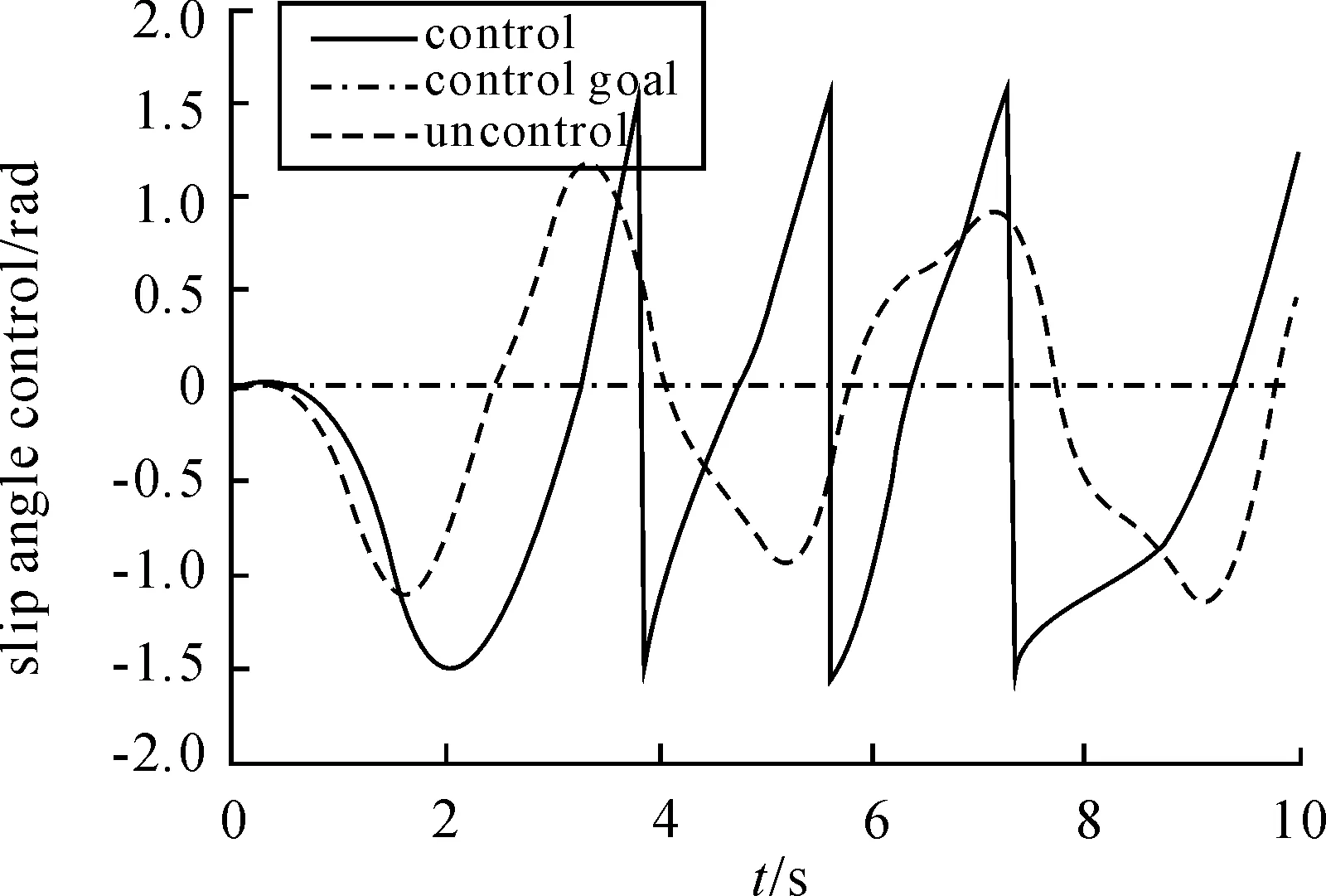
Fig.6 slip angle control results
The Fig.5,6 show that: without controller vehicle can’t with the change of the front wheel corner and make the reflection, with controller car following the expected yaw angular velocity very well; the vehicle which has a controller slip angle greatly reduce, improving the car driving stability.
6.Summary
Through the actual slip angle and yaw angular velocity that vehicle feed backed, set up the vehicle lateral movement, longitudinal motion, and around theZaxis oscillation and four wheel rotation 7-DOF vehicle dynamics simulation model, yawing moment controller can output stability of vehicle compensation yawing moment value. The simulation results indicated that: With direct yawing moment control vehicle can according to the steering wheel angle to the track of the road, its yaw angular velocity and slip angle changed little, which has greatly improved the lateral stability of the car so as to avoid the overturned cars of the phenomenon.
[1] Shibahata Y,Shimida K,Tomari T.The Improvement of vehicle maneuverability by direct yaw moment control[C]//Proceedings of International Symposium on Advanced Vehicle Control-AVEC’92.1992:452-457.
[2] Kim Dongshin,Kim Kwangil,Lee Woogab,et al.Development of Mando ESP (Electronic Stability Program)[C]//SAE paper 2003-01-0101.
[3] Shibahata Y,Shimida K,Tomari T.Improvement of vehicle maneuverability by direct yaw moment control[J].Vehicle System Dynamics,1993,22:45-481.
[4] SHI Xinmin,HAO Zhengqing.Fuzzy control and MATLAB simulation[M].Beijing:Tsinghua university press,2008.
[5] Jeongmin Kim,Hyunsoo Kim.Electric Vehicle Yaw Rate Control using Independent In-Wheel Motor.Power Conversion Conference[Z].Nagoya,Japan: IEEE Press,2007:705-710.
[6] ZHAO Zhiguo.Vehicle dynamics and its nonlinear control theory of technology research[D].Xi’an: Northwestern Polytechnic University,2002.
[7] WU Yihu,SONG Dandan,HOU Zhixiang et al.Vehicles of the lateral stability fuzzy control simulation[J].Changes University of Science and Technology Journal: Natural Science Edition,2007,4(2):49-53.
基于直接横摆力矩的电动汽车稳定性控制
段 敏*,应世明,张宏双
辽宁工业大学,辽宁 锦州 121001
基于直接横摆力矩的控制方法,建立了整车7自由度模型和理想汽车模型,采用了模糊逻辑的控制方法设计了控制器以提高了汽车的横摆稳定性。在不同工况下对汽车进行仿真。 结果表明,有控制器和无控制器的汽车相比,汽车的横摆角速度和质心侧偏角的稳态输出值减小,提高了汽车的横摆稳定性,所制定的控制策略是有效的。
横摆稳定性; 模糊控制; 横摆力矩;仿真分析
U461
Supported by the Education Department of Liaoning
Province (L2012217)
*DUAN Min.E-mail:345867793@qq.com.
10.3969/j.issn.1001-3881.2013.06.020
2012-11-15
猜你喜欢
杂志排行

机床与液压的其它文章
- Research and Realization of the Control System for Cement Screw Packing Machine Based on MCGS and S7-200PLC
- The Analysis and Countermeasure of Centrifugal Atomizer Nozzle Block Up
- Static and Dynamic Characteristic Analysis for Vehicle MRF Damper
- Multi-physics Coupling of Hydraulic System
- Research of Production Configuration Management Based on the Internet of Things-mixed Cloud Enterprise
- Research and Design of Embedded Serial Device Server on the DNC System