基于改进Gauss伪谱法的探月返回器跳跃式再入轨迹优化设计*
2013-05-15郭敏文王大轶
郭敏文 王大轶
1. 北京控制工程研究所,北京 100190 2. 空间智能控制技术重点实验室,北京 100190
探月返回器将以接近第二宇宙速度高速再入地球大气层。返回器再入的过程考虑为配平攻角飞行,即忽略了攻角和侧滑角的控制,仅仅通过调整倾侧角来控制飞行轨迹。要实现大航程、强约束的再入飞行,对小升阻比探月返回器的制导控制提出了全新的要求。
再入制导算法主要分为2类[1]:标准轨道法和预测校正法[2],本文主要研究标准轨道法的参考轨迹优化设计。从六七十年代至今,不少学者针对跳跃式再入轨迹设计问题提出了解析方法,这些方法主要可分为2类,一类主要用匹配渐近展开方法描述跳跃式再入轨迹。其中,Kuo和Vinh[3]利用改进的匹配渐近展开方法得到跳跃式再入轨迹的较高精度的二阶近似表达式,Kluever[4]则基于该方法解析得到跳跃式再入参考轨迹,并分段给出了跟踪参考轨迹的倾侧角指令。另一类为参考轨迹阻力剖面的设计方法。Garcia-Llama[5]将跳跃式再入轨迹第一次再入段(初始再入点到跳出点)的阻力剖面设计为四阶多项式,并应用反馈线性化方法跟踪其设计的阻力剖面。其阻力剖面的设计求解思想有别于文献[6]将再入轨迹阻力剖面设计为二次函数的做法。
近年来,许多学者针对轨迹规划问题提出了多种数值解法,且取得了重要进展。这些方法主要可分为:直接法[7]和间接法[8-9]。间接法将最优控制问题最终转化为两点边值问题,该问题求解过程对协态变量的初值高度敏感,收敛性差,同时轨迹规划过程中存在的各种约束使其求解过程变得较为复杂。相对于间接法,直接法在收敛的鲁棒性和解决实际问题的适用性上更具有优势。最近发展起来的一种求解最优控制问题的改进Gauss伪谱方法[10]是一种基于全局和局部插值多项式混合的直接配点法,其优点在于可用尽量少的节点获得较高的拟合精度。
应该指出,轨迹优化的理论已经比较成熟,但因跳跃式再入轨迹的优化设计有其新的特点,如强约束、多约束等,有必要对这方面进行深入地研究。目前该研究方向的文献相对较少。南英[11]对单次再入飞行、二次再入轨迹、多次再入轨迹在过载和热流方面进行了比较研究,并得出二次再入飞行为最优返回轨迹的结论。针对跳跃式轨迹的优化设计,Istratie[12]也提出了使多种不同性能指标最小的优化方案,但均未给出完整的最优跳跃式再入轨迹,只是针对第一次再入段的飞行轨迹进行了优化设计。
为满足过载和热流等过程量的约束条件,本文利用改进的Gauss伪谱方法[10]对完整的跳跃式再入轨迹进行优化设计。利用该方法计算比较了返回器在各相同初始再入条件下不发生跳跃和发生跳跃时的最远飞行距离,并对返回器在不发生跳跃时的飞行能力进行了分析。最后通过仿真表明该方法能很好地实现小升力体月球返回的跳跃式再入轨迹优化,有效满足过载及驻点热流的约束,并分析得出对于小升阻比返回器,当再入航程要求大于3500km时,需采用跳跃式轨迹再入的结论。
1 探月返回器跳跃式再入轨迹优化问题描述
1.1 再入动力学方程
整个飞行过程如图1所示,图中r0和rf分别为初始和末端时刻的地心距。假设探月返回器处于配平飞行状态,且地球是一个均匀球体,不考虑地球扁率、地球公转及地球自转,大气模型采用美国1976年标准大气模型,返回器再入的无量纲质心动力学方程[1]为
(1)

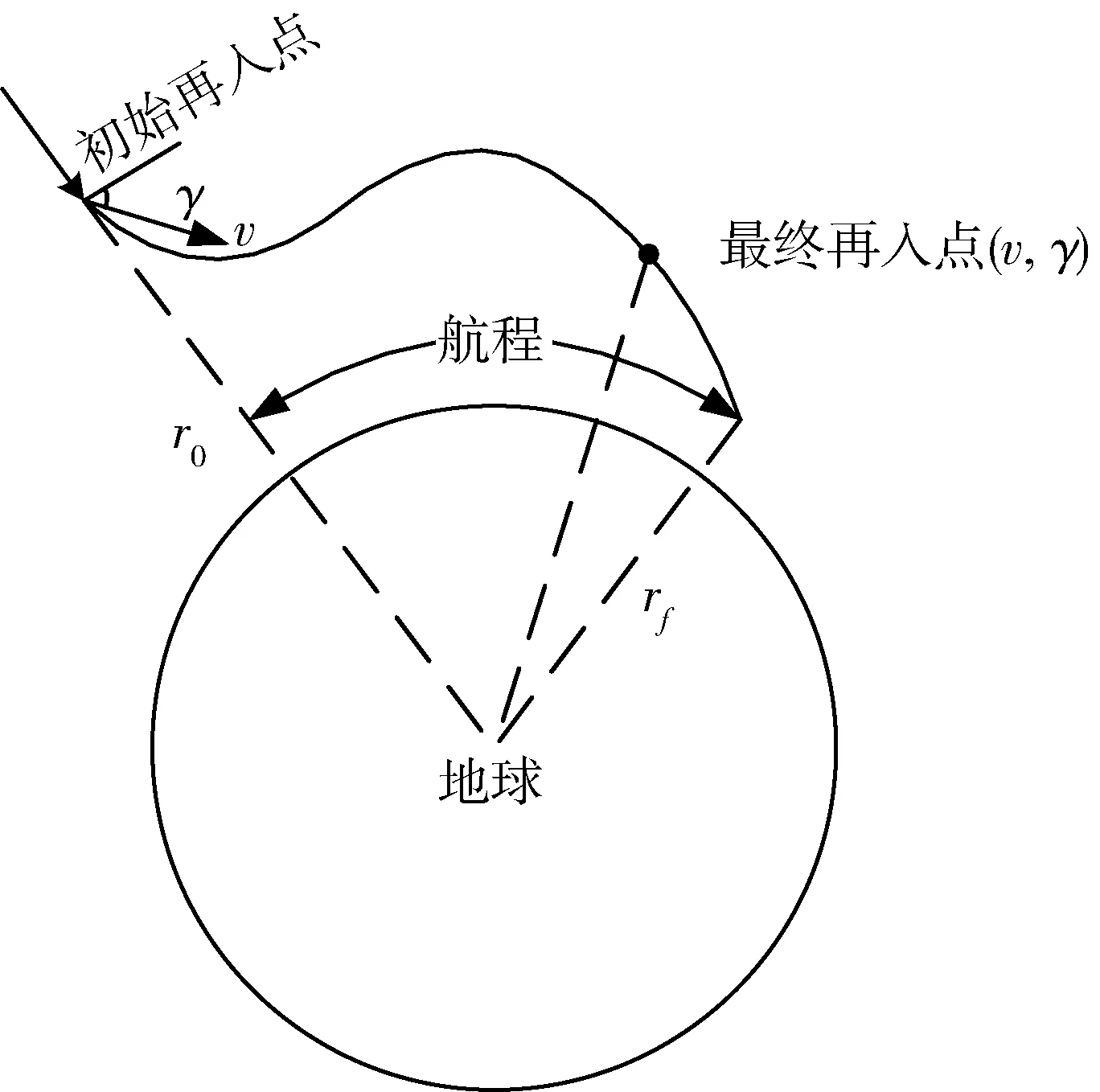
图1 探月返回器跳跃式再入轨迹示意图
1.2 约束条件
因探月返回器高速再入的特点,过载和热流约束变得十分苛刻。为了保证再入过程的安全,需要严格满足以下约束条件:
(1)气动加热约束
为减小气动加热,要求驻点热流不超过给定的最大值,即
(2)

(2)过载约束
为了减小再入时的过载,要求瞬时过载小于最大允许过载,即
(3)
其中nmax为最大允许过载值。
(3)终端状态约束
考虑经度、纬度、高度满足终端约束条件:
(4)
(4)控制量约束
考虑到实际倾侧角机动不可能瞬时完成,需要对倾侧角进行限幅,即:
|σ|≤σmax
(5)
1.3 目标函数
在高速再入过程中,为了减小防热系统的重量,性能指标一般取为再入过程的热流最小:
(6)
2 跳跃式轨迹航程分析
(1)跳跃式轨迹扩大航程能力分析
当地球自转和正对着陆点的航向偏移量可以忽略时,相对着陆点的航程变量s可以由下式得到:
(7)
将式(7)增加为系统描述的第7个方程,即将纵程s考虑为一个新的变量x7,其中rf为再入开伞点的高度。
由状态方程(1)和(7)可看出,其中状态变量r,v,γ和变量s的变化规律与另3项状态变量解耦,这里通过单独分析这4个量的运动规律,优化计算各不同初始再入角情况下发生跳跃和不发生跳跃时的最大航程,以对跳跃式再入轨迹在实现长纵程飞行方面的优势进行比较分析。因此优化性能指标取为新变量x7的末状态量,即
J=-x7f
(8)
这里,发生跳跃和不发生跳跃时的状态约束如下,其中不发生跳跃的飞行路径角保持小于0,即无上升飞行阶段,轨迹不发生跳跃。
发生跳跃:
状态量r和γ在整个飞行过程中被约束为:
-90°≤γ≤10°
rf≤r≤r0
不发生跳跃:
状态量r和γ在整个飞行过程中被约束为:
-90°≤γ≤0°
rf≤r≤r0
(2)不发生跳跃时飞行能力分析
这里通过考虑升阻比偏差及大气密度偏差对再入过程的影响,得到不同情况下返回器不发生跳跃时的最大航程和过载峰值,并对这些表征其飞行能力的数据进行分析,以得到需采用跳跃式轨迹再入的航程要求。
气动系数偏差采用如下表达式
(9)

由于高层大气变化极为复杂,从人造地球卫星上天以来,各国学者一直致力于开发高精度的标准大气模型及其扰动模型,采用了多个指标(考虑经纬度、季风、大气成分以及太阳活动等多种因素的影响)来描述大气的扰动。期间,形成了诸多不同的大气摄动模型,简单的有固定值偏差模型,复杂的如美国开发的GRAM(Global Reference Atmosphere Model)模型。
本文取大气摄动模型为固定值偏差模型来分析不发生跳跃时再入轨迹的最大航程,其变化范围取为[-30%, +30%]。
3 Gauss 伪谱法基本原理
高斯伪谱法将再入动力学微分方程转化为代数约束方程,将制导问题转化为不需要积分弹道的最优规划问题。伪谱方法的一个显著特征为谱收敛,即收敛速度大于N-m,其中N是配点个数,m是任意有限数值。
伪谱法的求解步骤:
1)不失一般性,将最优控制问题转化为Bolza形式,即最小性能指标函数:
(10)
满足动力学约束、等式边值条件约束、不等式路径约束如下:
(11)
这里t和τ之间的映射关系为:
(12)
2)基于Gauss伪谱方法的Bolza问题离散化

(13)

(14)

(15)
对状态变量表达式进行微分得到,
(16)
(17)
其中k=1,…,N;i=0,…,N。从而动力学微分方程约束转化为如下的代数约束:
(18)
其中Xk≡X(τk)∈Rn,Uk≡U(τk)∈Rm。离散化后的动力学方程约束只在LG点被满足,而离散状态初值为X0=X(-1),末端时刻状态值可通过Gauss积分近似得到
同样,性能指标也可通过高斯积分近似得到
(20)
其中wk为高斯权值。同时将式(11)中的边值约束以及路径约束分别离散为
以上性能指标函数(20)及代数约束方程(18),(19)和(21)定义了一个非线性规划问题,该问题的求解过程详见参考文献[13],其解就是上述连续Bolza问题的近似解。
4 改进算法
以上所描述的Gauss伪谱法是全局配点法,若要提高拟合精度,则需要增加拟合多项式的阶次。然而随着多项式阶次的增加,配点数也相应增加,这使得收敛速度减慢,非线性规划问题的计算变得难以处理。
这里采用改进的Gauss伪谱法,将全局配点法和局部配点法混合使用来提高拟合精度,即并不只是一味地提高拟合多项式的阶次,而是考虑将轨迹分成S个小段,然后分别对各小段选择合适阶次的多项式进行拟合。每段编号设为s∈[1,…,S],假定第s小段用Ns阶的多项式进行拟合,其状态拟合多项式Xs(τ)如式(13)所示。为达到提高拟合精度的目的,有2个方法可以考虑:将每一特定小段再继续分段,或者增加该段拟合多项式的阶次。而算法的关键在于如何对2种策略折衷选择。
算法的基本思路描述如下:

(22)

(23)
则认为小段s拟合偏差一致,此时通过增加该小段多项式阶次Ns来提高拟合精度;否则,如果存在任何一个局部偏差最大点不满足不等式(23)的约束,则将s小段在该点处进行分段。这里,λ值的选取体现了局部和全局配点策略的一个权衡。当λ值较小时,局部偏差最大点与偏差均值的比值则较易超过λ值而在某点处再进行分段;当λ值较大时,算法类似采用了全局配点方法。本文仿真时采用文献[9]中所提到的GPOPS优化软件,其具体分段数取决于拟合精度及λ值的大小,λ值一般取为3.5。
当确定某一特定段内偏差一致时,需要采用增加拟合多项式阶次的策略。假设前2次配点数分别为Nk-1,Nk,且拟合误差为ο(10-mk-1),ο(10-mk),而允许误差为ο(ε)。假定mk>mk-1,则估计应增加的配点数为Nk+1
(24)
该算法能自适应地更新轨迹的分段数和各段拟合的配点数,从而在设计尽量少的配点数的情况下,达到需要的拟合精度。
5 仿真分析
本文以探月返回器为仿真对象,质量9500kg,最大横截面积23.8m2。
5.1 跳跃式再入轨迹优化
具体仿真参数设置见表1,控制量σ约束在[-70°, 70°]之间变化,升阻比0.35,升力系数CL为0.44,阻力系数CD为1.25。轨迹状态量、过载、热流和控制量变化曲线如图2~5所示。由图3和4可见,设计的再入轨迹满足过载和热流约束。

表1 初末状态设置和过程约束

图2 状态量变化轨迹

图3 过载变化轨迹

图4 驻点热流变化轨迹

图5 控制变量变化轨迹
5.2 跳跃式再入轨迹航程仿真分析
根据文献[14]的再入走廊分析结果,这里在[-6.4°, -5.4°]之间均匀选择6个初始再入角值进行仿真,分别得到发生跳跃和不发生跳跃情况下的最大航程,见表2。为了清晰比对,这里给出了初始再入角为-6.0°时发生跳跃和不发生跳跃2种情况下的再入轨迹比较,如图6所示。同时给出了初始再入角分别为-5.6°,-6.0°,-6.4°时,跳跃高度h为120km的飞行情况比较,如图7所示,可知再入角越大(再入角绝对值),飞行的最大距离越小,且过载峰值越大。
由表2中数据可见,再入轨迹在不发生跳跃时的最大航程仅有3000多公里,由图6中的曲线对比发现当跳跃高度为120km时再入轨迹最大航程远远大于不发生跳跃时的最大再入航程。为得出长距离飞行是否必须采用跳跃式再入的结论,下面进一步仿真分析在不同升阻比和存在不同程度大气密度偏差时不发生跳跃的最大再入航程。

表2 两种情况下最大航程比较

图6 初始再入角为-6.0°时飞行情况比较

图7 跳跃高度为120km各不同再入角时飞行情况比较
利用Gauss伪谱法计算得到不同升阻比、不同初始再入角情况下的最大航程和过载峰值,并将数据绘制曲线如图8和9所示。由于航程随着再入角的减小而增大,这里选择再入角为-5.6°,仿真得到不同升阻比和不同大气密度下的最大航程和过载峰值,并将数据绘制曲线如图10和11所示。
由图8~11可看出:再入飞行的最大航程,随着初始再入角的增大而减小,随着升阻比的增大而增加,随着大气密度的变大而减小;过载峰值则随着初始再入角的增大而增大,随着密度的增加,减小较快。而过载峰值与升阻比之间的关系与初始再入角的大小有关:当初始再入角较大时,随着升阻比的增大,过载峰值减小较快;当初始再入角较小时,过载峰值反而随着升阻比的增大而缓慢增大。
综上可以得到最后结论,不发生跳跃的再入轨迹的最大航程不会超过3500km,则当再入航程要求大于3500km时需采用跳跃式轨迹再入。

图8 最大航程随升阻比和再入角变化情况

图9 过载峰值随升阻比和再入角变化情况

图10 最大航程随大气密度和升阻比变化情况

图11 过载峰值随大气密度和升阻比变化情况
6 结论
本文首先基于改进的Gauss伪谱法对探月返回器高速再入任务进行了轨迹优化设计,得到了满足过载和热流等强约束且总吸热量最小的跳跃式再入轨迹。然后利用该方法优化计算了在不同升阻比和存在不同程度大气密度偏差的情况下,再入过程发生跳跃和不发生跳跃时的最大航程及过载峰值。通过比较可知,跳跃式再入轨迹能在较大程度上扩大小升力体再入航程,并得出结论:当再入航程要求大于约3500km时,需要采用跳跃式轨迹再入。
参 考 文 献
[1] Wingrove R C. Survey of Atmosphere Re-Entry Guidance and Control Methods[J]. AIAA Journal, 1963, 1(9): 2019-2029.
[2] 李惠峰, 张蕊.探月飞船预测-校正再入制导律设计[J].空间控制技术与应用, 2009, 35(1): 19-24. (LI Huifeng, ZHANG Rui. Design of Predictor-Corrector Reentry Guidance Law for Lunar Mission Spacecraft. Aerospace Control and Application, 2009, 35(1): 19-24.)
[3] Kuo Z S, Vinh N X. Improved Mathced Asymptotic Solutions for Three-Dimensional Atmospheric Skip Trajectories[J]. Journal of Spacecraft and Rockets, 1997, 34(4): 496-502.
[4] Kluever C A. Entry Guidance Using Analytical Atmospheric Skip Trajectories[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(5): 1531-1534.
[5] García-Llama E. Analytic Development of a Reference Trajectory for Skip Entry[J].Journal of Guidance, Control, and Dynamics, 2011, 34(1): 311-317.
[6] Harpold J C, Graves C A. Shuttle Entry Guidance[J]. Journal of Astronautical Sciences, 1979, 37(3): 239-268.
[7] 姚寅伟, 李华滨.基于Guass伪谱法的高超声速飞行器多约束三维再入轨迹优化[J]. 航天控制, 2012, 30(2): 33-38. (YAO Yinwei, LI Huabin. The Generation of Three-dimensional Contrained Entry Trajectories for Hypersonic Vehicle Based on the Gauss Pseudospectral Method[J]. Aerospace Control, 2012, 30(2): 33-38.)
[8] Fahroo F, Ross I M. Trajetory Optimization by Indirect Spetral-olloation Methods[C].AIAA Astrodynamics Specialist Conference, Denver, CO, 2000.
[9] 高艾, 崔平远, 崔祜涛.深空着陆器随机优化制导律设计[J].宇航学报, 2011, 32(9): 1884-1889. (GAO Ai, CUI Pingyuan, CUI Hutao. Stochastically Optimized Guidance Law Design of the Deep Space Lander[J]. Journal of Astronautics, 2011, 32(9): 1884-1889.)
[10] Darby C L, Rao A V. A State Approximation- Based Mesh Refinement Algorithm for Solving Optimal Control Problems Using Pseudospectral Methods[C].AIAA Guidance, Navigation, and Control Conference, Chicago, Illinois, 2009.
[11] 南英, 陆宇平, 龚平.登月返回地球再入轨迹的优化设计[J].宇航学报, 2009, 30(5): 1842-1847. (NAN Ying, LU Yuping, GONG Ping. Optimal Reentry Trajectory Design for Mooncraft Returning to the Earth[J]. Journal of Astronautics, 2009, 30(5): 1842-1847.)
[12] Istratie V. Optimal Skip Entry into Atmophere with Minimum Heat and Constraints[C].AIAA Atmospheric Mechanics Conference and Exhibit, Providence, Rhode Island, 2004.
[13] Benson D A, et al. Direct Trajectory Optimization and Costate Estimation via an Orthogonal Collocation Method[J].Journal of Guidance, Control, and Dynamics, 2006, 29(6): 1435-1440.
[14] Souza S D, Sarigul-Klijn N. An Analytical Approach to Skip Earth Entry Guidance of a Low L/D Vehicle[C]. 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 2008.
