舰载光电对抗系统作战仿真方法研究*
2012-06-07史匡
史 匡
(华中光电技术研究所武汉光电国家实验室 武汉 430074)
1 引言
装备作战仿真是将武器系统的仿真模型在虚拟战场环境中,在一定的作战背景下,进行武器系统、人员、战场环境的作战过程仿真。舰载光电对抗系统是一套具备激光压制、激光压制干扰、激光引偏干扰和无源光电干扰等多种干扰手段的对抗系统。在缺乏实弹试验的条件下,开展作战仿真就成为舰载光电对抗系统干扰效能的一条重要研究路径[1]。文献[1]中介绍了装甲车辆作战仿真平台设计方案,在该平台上可以进行装甲车辆作战仿真、作战效能评估,该平台为装甲车辆改型以及研制方案论证提供决策依据,也可以用于研究作战理论[2];文献[2]中针对防空作战仿真系统的特点,建立了基于HLA技术的公共仿真开发平台[3],文献[3]在分析光电对抗装备仿真技术现状和发展趋势的基础上,探讨了光电对抗仿真评估系统的总体结构和组成,对其中涉及的关键技术进行了初步研究。但开发过程中需HLA软件平台支持,起点较高,不易普及。
2 作战仿真模型
在进行舰载光电对抗系统仿真作战过程中,需对作战双方及作战过程进行建模,所需的模型为虚拟战场环境模型、舰船模型、干扰分系统模型、光电制导武器模型、干扰作战决策模型等。在此基础上可开展光电对抗作战的战术决策的效能研究、战术研究、最佳配置方案等。
为提高仿真过程的可信度,仿真模型的计算过程中增加了随机数,随机数采用的伪随机数生成算法为线性同余算法。其算法为

随机数的种子是采用直接读取CPU时钟和计数器计数值实现的,其取值范围为[0,1]。
2.1 虚拟战场环境
在试验中模拟的作战环境为纯海洋背景,设定了以下变量:洋流方向、洋流速度、风速、风向和能见度。其中洋流方向和洋流速度影响舰船的坐标计算,而风速和风向影响到来袭导弹的坐标计算,考虑到风对舰船的作用远小于洋流对舰船的作用,因此在本试验中,忽略不计。
考虑到光电对抗其作战范围小于视距距离,因此虚拟的战场是一个无限大的平面,但其作战范围是以舰船为中心的视距范围(≤25km)。虚拟战场统一使用直角坐标系,洋流和风对物体的作用解析为两个坐标轴上作用力的合成。坐标系原点设置为舰船的初始位置,航向角以正北方向为0°,顺时针方向为正。
在实际环境中海面存在一定幅度的波浪,这会影响到舰船的姿态计算,因此忽略不计。
2.2 导弹运动模型
文献[4]为研究反舰导弹飞行仿真方法,依据导弹系统组成、各个部分相互作用关系和使用环境条件、使用方式,研究建立数学模型、仿真程序设计、计算方法,所采用的模型较为复杂,不适合本课题的需求。因此本课题的导弹模型仅采用了运动学模型:
2.3 舰船运动模型
虚拟战场中的舰船是被假定为匀速运动的,不考虑因为舰船动力变化引起的速度和航向的变化,亦不考虑因为海浪引起的舰船姿态的变化。
假设舰船当前所在位置为(x0,y0),速度为vm/s,航向为θ弧度,经过t时刻后新位置(x1,y1)的计算公式为

2.4 激光压制干扰设备模型
在本试验中激光压制干扰设备的数学模型仅考虑其随舰船运动、在方位俯仰方向的旋转和压制激光的工作三个因素,其余细节均忽略不计。
2.5 激光引偏干扰设备模型
在本试验中激光压制干扰设备的数学模型仅考虑其随舰船运动、在方位俯仰方向的旋转和引偏激光的工作三个因素,其余细节均忽略不计。
2.6 无源干扰设备模型
在本试验中无源干扰设备的数学模型仅考虑其随舰船运动、在方位俯仰方向的旋转和烟幕干扰弹布设三个因素,其余细节均忽略不计。在目前缺乏无法干扰设备布设模型的情况下,假设布设烟幕的目的是在导弹和舰船之间形成一道烟幕墙,使得导弹无法探测到舰船目标。
2.7 激光在大气中的能量衰减模型
激光在大气中的能量衰减主要来源于两个方面:激光束散角和大气粒子对激光能量的散射,经典的激光在大气中的能量衰减公式为

其中:σ为大气衰减系数,取2.7;V 为大气能见度,取20km;R为目标距离,单位km;θt为激光束散角,取1mrad;Ar为探测器的孔径(面积),单位为m2;根据计算,相对大气能见度而言,激光的束散角对激光能量的衰减作用更为明显。
2.8 作战决策模块算法
作战决策模块是基于舰载光电对抗演示系统开发的,采用了相同的决策算法。算法根据目标的威胁等级大小和与舰船距离远近依次采用不同干扰手段发送光电作战指令,每隔1s决策一次。
3 作战仿真试验
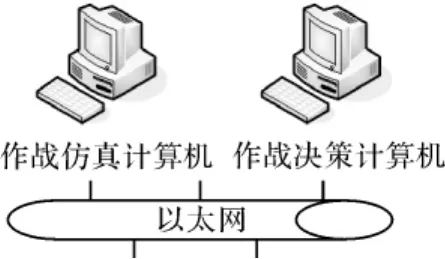
图1 仿真试验硬件结构
舰载光电对抗系统作战试验是建立在半实物仿真试验数据基础上的数学仿真试验,在作战仿真计算机中虚拟出一个作战环境,并在此环境中构建来袭导弹、舰船和舰载光电对抗系统。通过步进仿真的方式来对舰载光电对抗系统的作战过程进行仿真,而舰载光电对抗系统的作战方案制定是由作战决策计算机生成的,两条计算机通过以太网方式连接,如图1所示。
仿真试验的过程为:接到启动命令后,每隔一个仿真周期(默认为40ms)作战仿真计算机计算虚拟战场中各物体的状态、姿态和位置等信息,经过数据处理后,将来袭导弹信息和各干扰设备的状态信息通过以太网传递给作战决策计算机,作战计算机接收到数据后按照作战规则自动生成作战方案,然后将作战流程发回作战仿真计算机,作战仿真计算机将命令送到相应的虚拟干扰设备中,等待下一个仿真周期开始,依次循环,直到符合仿真结束条件出现才停止仿真试验。
仿真试验结束的条件为:1)所有来袭导弹均已干扰成功;2)舰船被击中;3)总的仿真耗时到达了限定时间。
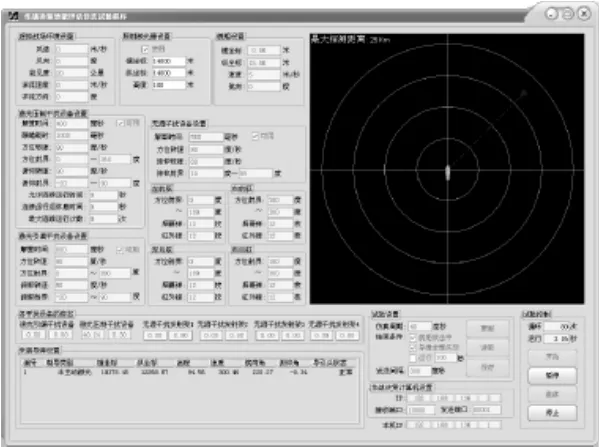
图2 作战仿真计算机主界面
试验将首先对光电制导导弹模型进行无干扰条件下的仿真飞行试验,评估其性能;再对导弹模型施加单一干扰样式,评估光电对抗的干扰效能;最后由舰载光电对抗系统演示系统的作战决策模块指挥进行光电对抗综合作战仿真试验。
4 试验结果
激光半主动制导导弹在工作过程中需要目指激光进行引导,假设舰船初始位置在(0,0)处,目指激光在(14000,14000,100)(单位:m)处,则激光目指与舰船距离约20000m;导弹的初始位置、舰船速度10m/s,航向正北;、风向、风速、洋流速度、洋流方向均为0,能见度为20000m;仿真周期为40ms;仿真试验不考虑各种设备故障对试验的影响。假设导弹进入与舰船距离小于15000m时,采用激光压制干扰设备;小于7000m时,使用无源干扰样式;有激光目指时,采用激光引偏设备,布设点与舰船距离150m。
4.1 无干扰时光电制导导弹的仿真飞行试验
每次仿真试验的导弹出现位置固定,但舰船位置不固定,为上一次仿真试验结束后的位置。表1记录了激光半主动制导/导弹的弹着点与瞄准点的距离。
表1 激光半主动制导导弹仿真试验结果
从上述试验结果可以发现,无干扰条件时导弹均可以击中舰船,且与舰船的尺寸相比,弹着点的误差可以忽略不计。
4.2 光电对抗综合作战仿真试验
图3 仿真光电制导导弹飞行轨迹曲线水平面投影
试验过程与前一个试验相同,不同点为三种干扰手段会综合使用,电视制导、红外制导和激光半主动制导导弹各一枚从不同方向来袭,距舰船20km左右。仿真试验的结果如图3所示。
作战模拟仿真程序可模拟真实的光电对抗作战过程,从图3中可以发现这三枚光电制导导弹是依次被干扰成功的;作战决策模块提交的对抗多目标的作战方案可行。
5 结语
在仿真试验中,作战决策模块无航迹预测功能,因此判断导弹被干扰成功的依据是导弹消失,收不到更新的数据。而光电制导导弹被干扰成功到导弹消失存在一段时间,因此建议舰载光电对抗系统的战术应用软件的设计过程中具备航迹预测功能。无源干扰手段的干扰效能与其烟幕存在周期有关,因此在实际的舰载光电系统设计中,要充分考虑干扰弹发射时刻和战场环境中的风对烟幕存在周期的影响,战术应用软件可进行烟幕布放及存续时间的预测功能。
[1]狄东宁,王正元,岑凯辉,等.装甲车辆作战仿真平台设计[J].计算机仿真,2003(3):22-24.
[2]马贤颖,李学军.基于HLA的防空作战仿真系统研究[J].现代电子技术,2005(19):4-6.
[3]余宁,李俊山,王新增,等.光电对抗仿真评估系统研究[J].四川兵工学报,2011(5):5-7.
[4]符燕,付新胜.反舰导弹飞行仿真方法[J].指挥控制与仿真,2010(10):87-89.