无人系统工程专业综合训练课程实战化教学研究
2024-06-20王钦钊武萌唐伟张雷
王钦钊 武萌 唐伟 张雷
摘 要:该文以连接专业背景课程和首次任职课程重要枢纽的终结性专业必修课程无人系统工程专业综合训练为基础,通过参与无人装备试验和代职为契机进行需求分析,找准实战化教学改革的方向。在此基础上,基于新型无人平台构成、关键技术融合、无人平台运用、作战样式实现和适应新装备等问题,确定课程教学目标,梳理课程教学内容,挖掘课程实施策略,为课程实战化教学提供有效的思路。通过建立实战化教学平台,打造复合型教学队伍,以期使课程教学更加贴近装备,贴近部队实际。
关键词:终结性专业必修课程;无人装备试用;关键技术融合;新型无人平台;复合型教学队伍
中图分类号:G642 文献标志码:A 文章编号:2096-000X(2024)16-0104-04
Abstract: Based on the final professional compulsory course "Integrated Training of Unmanned System Engineering", which connects the professional background course and the first professional course, this paper analyzes the needs of the course by participating in the trial of unmanned equipment, and finds the direction of practical teaching reform. Based on the composition of the new unmanned platform, the integration of key technologies, the application of unmanned platform, the realization of combat style, and the adaptation to new equipment, the teaching objectives of the course have been determined, the teaching contents of the course have been sorted out, and the implementation strategies of the course have been explored to provide effective ideas for the practical teaching of the course. By establishing a practical teaching platform and building a compound teaching team, the course teaching is more close to the equipment and the actual situation of the army.
Keywords: the final professional compulsory course; the trial of unmanned equipment; the integration of key technologies; the new unmanned platform; the compound teaching team
实战化教学,是指以部队需要、现实问题需要为背景,将部队关注的问题融入课堂,以作战训练中的难点、热点问题为重点,建立紧贴实战的课程教学目标、教学内容体系、教学方法手段和教学条件等,以提高学员胜任岗位任职能力的一种教学形式。纵观近几场局部战争,智能无人力量逐渐成为对垒厮杀的利刃、主宰战场的利剑、打赢制胜的利器。各国无论实力强弱都在竞相发展智能无人技术。要加大军事智能化发展力度,加快无人作战力量建设。
无人系统工程专业综合训练是无人系统工程本科专业人才培养方案中一系列专业背景课程之上的最后一门终结性专业必修课程,课程综合性、实践性强,是连接专业背景课程和首次任职课程的重要枢纽,是无人系统工程专业实战化教学改革的重点课程。课程团队成员以参与无人装备试验和部队代职为契机,全过程深入部队一线,理解无人装备的运用方法,理解无人装备的使命任务,探讨部队对人才培养需求,并因此查找课程实战化教学改革方向。
一 基于部队需求侧分析确定课程教学目标
参与无人车部分车型的全过程装备试验,开展相关车型的综合战术演练,发现新装备的运用需要理解关键部件、部分关键技术、部件自身特点造成的装备运用过程中可能存在的问题及战术运用方法。另外,以代职锻炼和装备试验为契机,与一线部队不同层级军官沟通交流,感受到一线部队军官对院校教育的需求和期待,如对当前任职的作用,对新装备、新技术、新领域的预先探索以及对后续个人发展的持续推动作用等。通过部队试用和代职,使教员更好地理解实战化教学方向。
无人系统工程专业综合训练作为连接专业背景课程和首次任职课程的重要枢纽,综合实践课程,采用“模块→综合、机电→智能、平台→集群”的层次性科目内容设置方式,基于机器人综合实验平台,理解新装备无人平台的系统构成,关键部件、部分关键技术,从而理解装备基本运用方法、运用过程可能存在的问题,提升专业素养,提升新装备适应能力。作为终结性综合实践课程,该课程开设基于装备特点,为首次任职奠定基础,可以开展实战化教学,无人系统工程专业课程的实战化教学可以结合以下方面开展。
1)以新装备无人平台的系统构成和技术特点为依托,应用机器人综合实验平台,通过“模块→综合”分析无人平台系统构成、典型技术参数、常用部件的功能和基本使用方法。
2)通过“机电→智能、平台→集群”,理解相关关键技术和部件自身特点造成的装备运用过程中可能存在的问题,进而理解基于无人装备作战运用方法。
3)通过训练科目的多次探索、实践、提升,对新装备、新技术、新领域进行预先探索,提升专业的思维能力和科学素养。
基于以上分析,确定无人系统工程专业综合训练课程总体目标:通过本课程的学习,使学员了解无人平台相关关键技术的基本实现方法,理解无人平台典型结构关键部件的使用方法,理解系统构成和综合设计方法,通过多重实验环节,最终理解新装备多部件和相关多种关键技术融合,为新装备无人车配发后装备使用、作战运用奠定技术基础,同时提升新装备的适应能力、专业的思维能力和基于知识迁移的再学习能力。
二 贴近装备实际,梳理教学内容
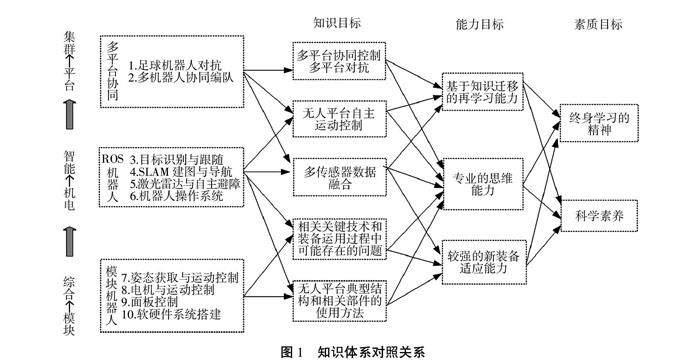
课程依据机器人综合实验平台即模块机器人、ROS机器人、足球机器人等多平台协同,完成各个实验科目。制定了层次性课程教学内容为模块→综合、机电→智能、平台→集群,即从无人平台的典型构成进行分析,从模块功能到系统的基本功能实现,从机电环节综合到智能算法关键技术的引入,从单平台到集群控制。形成知识目标为理解无人平台典型机构、相关部件使用方法,理解相关关键技术、多部件和多种关键技术融合,掌握基本的无人平台自主运动控制、协同控制和对抗方法。形成能力目标为较强的新装备适应能力、专业的思维能力和基于知识迁移的再学习能力;形成素质目标:科学素养,以期形成终身学习的精神。具体知识体系对照关系如图1所示。具体环节如下。
(一) 从模块到综合,基于系统结构,理解构成无人装备的各模块功能实现方法
通过学习机器人综合实验平台的系统搭建方法,理解无人装备的组成。基于机器人综合实验平台进行模块化设计,如面板控制、电机与运动控制、姿态获取、激光雷达和视频图像获取等设计实践,理解无人装备典型结构和相关部件的使用方法,传感器自身物理缺陷,装备实际运用过程的注意事项等,如激光雷达的噪点、传输干扰可能带来的影响等,提高新装备的适应能力。
(二) 从机电到智能,理解无人装备多传感器数据融合,形成重要性能指标的关键技术设计方法
从机电到智能,在机电综合的基础上融入智能算法,如局部路径规划、全局路径规划等,进而理解新装备无人平台形成重要性能指标的关键技术设计方法如自主避障、建图与导航、目标识别、智能跟随、编队和对抗等;理解部分关键技术实现难点,应用中所需关注的注意事项,如运动目标经常无法有效跟踪问题、自主跟随中的跟随距离问题、路径规划后的自主避障问题等,使学员通过实践,在装备运用过程中能够从深层次思考,从专业的角度发现问题并解决问题。
(三) 从平台到集群,理解新型无人装备的使命任务,理解新型装备运用实现方法
从平台到集群,通过无人平台自主打击对抗赛,通过掌握无人平台单平台操控和多平台协同的实现方法,如单平台自主打击、多平台打击、多平台对抗等基本实现方法,思考多车间信息传递、协同目标识别与定位、目标回传精确打击等关键技术问题,在原专业背景课程学习基础上提高知识迁移的再学习能力。同时理解当前新型无人平台的使命任务以及新技术对当前战争形态发展的推动作用,并且将技术人员在装备研发、性能试验等过程坚持不懈、追求真理的战斗精神融入课堂,在学习新技术的同时提升价值追求。
三 面向装备运用,突出组训能力培养,挖掘课程实施策略
(一) 案例引入,使实践教学与新装备运用相结合
采用案例方式对实践环节进行引入,案例选择与新装备运用相结合,课程设置有激光雷达探测障碍技术运用案例、视觉传感器自主跟随技术案例、视觉传感器目标识别技术案例等技术应用案例,有人无人编队、协同夺控目标等战术案例。如在讲解激光雷达的时候,通过激光雷达与探测障碍技术运用案例相结合,并引入地面无人平台在自主行驶过程中,通过车载激光雷达自主避障,躲避树木、乱石堆等障碍物,结合导航定位系统,使路线航迹与规划一致,到达任务地域,最终执行战斗任务的案例,通过技术案例讲解,实践环节模拟,使课程实践内容与新装备运用相结合。战术案例,如在多平台对抗环节,引入有人无人编队开进案例,使科目实践含有战术背景,为理解新装备的战术运用奠定技术基础。
(二) 实践环节对比分析,提高新装备适应能力
当前无人装备正在研制和列装中,本门课程实践环节选取机器人综合实验平台,具有典型无人平台的功能模块,可实现典型无人平台的关键技术,课程实践过程注重对比分析新型无人装备的重要性能指标、关键技术,并基于机器人综合实验平台对形成关键技术的模块和综合功能进行多次实践和重要参数判别,进而理解由于部分技术难题,在实际装备应用中所需关注的注意事项,提升新装备适应能力,为后续新型装备的配发后运用打下基础。
(三) 课程考核注重组训能力培养
对课程考核组训方式进行改革,科目过程考核和终结考核采用开放的以赛代考的考核模式,不再采用仅仅教员组训、学员参训方式开展,而是以教员引导、学员组训方式展开。考核过程在教员引导下,由学员灵活设置相应科目背景,制定组训计划,讲解考核规则,并组织训练,实践科目考核成绩由教员和学员共同评判得出,考核过后赛后复盘,由各组学员讲解考核完成过程,逻辑结构、参数选择和调试方法,共同讨论查找存在的问题和可以提升的方向,教员在学员复盘基础上,再次引导提升。“教员引导、学员组训、以赛代考和赛后复盘”的教学评价方法,更新传统的评价方式,调动学员自身积极性,提高了组训能力。
四 不断更新,建立实战化教学平台
合理规划“十四五”教研条件建设,加大集群对抗性教学条件建设,初步构想仿真与实物相结合,构建真实的仿真环境,在仿真环境下进行集群对抗模拟训练,仿真环境不受时间、空间限制,给学员近似实装的体验,学员基于模拟训练环境对无人平台进行操控,进一步理解无人平台的典型结构、相关部件使用方法,多种关键技术融合,单平台自主运动控制、集群战术对抗方法。
在仿真基础上建设室外环境下的多车对抗教学实验条件,理解单平台核心部件和关键技术基础上,进行无人平台侦查、多无人平台编队开进、协同战术对抗等科目训练,使教学训练科目更加贴近实战。
五 打造复合型教学队伍
教员是实战化教学的组织者和执行者,建设一支熟悉装备使用、组训与管理、系统联调联试的技能复合型教员队伍是确保教学效果的重要保证。为理解新型装备的运用方式、战法训法,熟悉装备发展,团队成员通过到军地高校进行学术调研交流,探讨相关新技术、新领域的发展方向,探讨相关课程教学理念和教学模式,提高教学质量;积极参与无人装备的研制、试验、训练和跨越险阻陆上无人系统挑战赛等工作,提升教员队伍能力,熟悉无人装备运用,理解无人装备作战训练方式;定期通过部队调研、部队代职等工作,深入一线部队,了解作战指挥,进一步扩充军事应用背景案例库和实验科目,把实际装备与作战案例融入到课堂教学一线。
六 结束语
无人系统工程专业综合训练实战化教学改革以无人作战使命任务、首型无人装备的运用为引领,基于部队对人才培养需求,扎实课程教学目标,基于无人装备的运用梳理课程教学内容,面向提升新装备适应能力,挖掘探索教学策略,建立实战化教学平台,打造复合型教学队伍,通过对实践教学目标、内容、策略、教学条件和教学队伍建设进行梳理,确保实战化教学效果。下一步将不断积累经验和发现不足,促使实践教学贴近部队实际,贴近装备运用实际,推进课程实践教学向实战化发展聚焦。
参考文献:
[1] 张衡,林强,张堃,等.雷达装备课程实战化教学思考[J].空军预警学院学报,2014,28(5):372-373,376.
[2] 罗锦,李柯,柳鹏.面向实战化的防空导弹装备课程教学研究[J].教育教学论坛,2016(36):198-199.
[3] 马志松,牛涛,余洪利.陆军作战课程实战化教学改革研究[J].教育教学论坛,2013,27(11):64-66.
[4] 俞志强,万凡兵,徐晨羲,等.加强雷达装备实战化教学的思考[J].空间预警学院学报,2015,29(6):444-446.
[5] 李安.对推进实战化教学的几点思考[J].后勤学院学报,2014(1):54.
[6] 吴亚男.实战化训练研究[M].北京:国防大学出版社,2010.
[7] 吕海燕,王杰,刘军山.基于五大发展理念的基础实验课程实战化教学体系重构与优化[J].实验室研究与探索,2017,36(10):191-194.
[8] 黄靖,徐建霖,杨锋,等.军队院校任职教育实验教学改革的思考[J].教育教学论坛,2017(9):114-115.
[9] 杨秀芹,邹开凤,姚本军.任职教育课程岗位牵引教学模式改革与实践[J].继续教育,2017,31(4):53-54.
第一作者简介:王钦钊(1973-),男,汉族,山东威海人,博士,教授。研究方向为无人系统工程。
*通信作者:武萌(1981-),女,汉族,山东泰安人,博士,讲师。研究方向为无人系统工程。