分子泵用无位置传感器无刷直流电机控制器设计
2024-04-23王彦劼李强陶继忠
王彦劼 李强 陶继忠


摘要:首先介绍了无刷直流电机的基本模型和特性,对无位置传感器控制方式的基本原理进行研究。随后据此设计了一种分子泵用无位置传感器无刷直流电机控制系统,该系统采用反电势过零点检测方法获取转子位置信息,以进行换相逻辑控制,改进了电机的预定位及启动方式,降低了分子泵电机结构设计的复杂度,提高了分子泵的可靠性。接着从硬件设计和软件控制策略部分详细介绍了该控制系统。最后在实验平台上进行验证。使用所设计的控制器对分子泵进行驱动实验,结果表明,分子泵能够稳定启动并进入额定工作状态,分子泵额定转速可达90 000 r/min,且转速波动可稳定在±60 r/min内。
关键词:无位置传感器;无刷直流电机;分子泵;电机控制器
中图分类号:TM33 文献标志码:A doi:10.3969/j.issn.1006-0316.2024.02.011
文章编号:1006-0316 (2024) 02-0065-07
Design of Positioning Sensor-lessBrushlessDCMotor Controllerfor Molecular Pumps
WANG Yanjie,LI Qiang,TAO Jizhong
( Institute of Machinery Manufacturing Technology, China Academy of Engineering Physics,Chengdu 610200, China )
Abstract:Firstly, this article introduces the basic model and characteristics of brushless DC motors and studies the basic principles of positioning sensor-less control methods. Then, a position sensor-less brushless DC motor control system for molecular pumps is designed based on this method. The system uses the zero crossing detection method of back electromotive force to obtain rotor position information to perform commutation logic contro. The design improves the predetermined position and start mode of the motor, reduces the complexity of the structural design of the molecular pump motor, and improves the its reliability. Subsequently, the control system is introduced in detail from both the hardware design and software control strategies. Finally, verification is conducted on the experimental platform.The controller designed is used to drive the molecular pump. The results show that the molecular pump can start stably and enter the rated working state. The rated speed of the molecular pump can reach 90 000 r/min and the speed fluctuation remains stable within the range of ±60 r/min.
Key words:positioning sensor-less;brushless DC motor;molecular pump;motor controller
分子泵是一種真空获得设备。分子泵的抽速、压缩比等体现工作性能的参数与其转子转速成正相关[1]。分子泵的主轴转速很高,每分钟能达到几万转,而高速无刷直流电机的特点正好可以满足分子泵的需求,目前国内研制的分子泵转速一般在20 000~80 000 r/min。在分析仪器应用中,分子泵内部气体成分复杂,有传感器无刷直流电机可靠性较低,所以国内外分子泵控制方式主要采用无位置传感器控制方式。研究人员对分子泵的研究主要集中在分子泵的结构设计以及无位置传感器无刷直流电机控制方式方面,特别是对无位置传感器无刷直流电机的控制方式、位置检测方式优化、换相校正方面[2-3]。
无刷直流电机有着结构简单、扭矩大、效率高、体积小、易维护等优点,被广泛应用于航空航天、精密仪器、工业设备以及家用设备等领域[4-6]。无刷直流电机一般是通过霍尔传感器、电磁式传感器等获取转子的位置信息,以实现六步换相策略[7-8]。这种方法简单成熟,但安装传感器会使电机结构复杂,增加安装成本,还会导致系统的可靠性降低。传感器实际安装的误差还会引起检测到的三相位置反馈信息不对称,从而导致转速和转矩波动[9-11]。分子泵运行时电机转速较高,且工作环境复杂,有传感器控制方案可能使分子泵在恶劣工况下无法正常运行,且不满足可靠性要求,而采用无位置传感器控制方式控制无刷直流电机可以改善电机在复杂工况下的稳定性和可靠性[12-13]。
无位置传感器控制方式是通过采集端电压、相电流以及磁动势和反动电势等信号以提取位置信息。一般的无位置传感器控制方法有反电势法、电感法、磁链法、状态观测器法和神经网络法等[14-18]。其中反电势法算法简洁,易于实现。而其他方法算法较为复杂,计算量较大。本文设计的控制器采用的是基于相反电势过零点检测法的控制策略。
本文对分子泵用无位置传感器无刷直流电机的控制器进行研究。首先介绍无刷直流电机的反电势特性以及基于此特性的无位置传感器无刷直流电机控制方法,随后详细介绍控制系统的硬件电路模块设计和软件控制策略,最后对分子泵进行测试并对实验结果进行分析,得出研究结论。
1 无刷直流电机的反电势特性
无刷直流电机的原理图和反电势特性分别如图1、图2所示。电机运行时,同一时刻只有两相导通,由于转子磁感应强度为梯形分布,可以通过测量非导通相的反电势得到其过零点,并据此估计转子的位置信息。电机采用六步换相方式,定子绕组每隔60°电角度按照逻辑表由V1~V6依次循环导通进行换相。
U0为直流驱动电压;n为实际中性点;m为虚拟中性点;R为电阻;L为电感;V1~V6为MOSFET(Metal Oxide Semiconductor Field Effect Transistor,金属氧化物半导体场效应晶体管);A、B、C为三相绕组引出端点;EA、EB、EC为A、B、C三相的反电势。
Z1~Z6为周期内六个过零点。
以图2中电角度30°~90°的过程为例,高压侧MOSFET“V1”处于PWM(Pulse Width Modulation,脉冲宽度调制)状态,低压侧MOSFET“V6”处于导通状态,为H_PWM-L_ON导通模式。电流从电机A相流入,从电机B相流出,此时A相绕组和B相绕组导通,C相悬空。在电机运行过程中,转子旋转会使每相绕组都产生感应反电势。在电角度为60°时,C相绕组反电势过零点。由于理想换相点和上一反电势过零点之间有30°电角度的相位差,所以需采用30°电角度延迟换相的方法,即在90°时进行换相。
理想情况下,可以通过中性点电压和端电压之差来获取相电压,电机模型中绕组的实际中性点如图1中n点所示。以C相为例对绕组电压方程进行说明,当A、B两相导通时,C相不导通,此时C相的相电压可表示为:
(1)
式中:![]() 为C相的反电势;
为C相的反电势;![]() 为C点和地之间的电压;
为C点和地之间的电压;![]() 是n点和地之间的电压。
是n点和地之间的电压。
但是在电机生产制造时一般不会将中性点单独接出,而是将其隐藏在定子绕组中,无法直接测量中性点与地之间的电压。为了测得反电势,在A、B、C三点处外接三个阻值相等的电阻组成一个星型网络,并引出虚拟中性点m。由此可得:
(2)
式中:![]() 為虚拟中性点m和地之间的电压。
為虚拟中性点m和地之间的电压。
实际应用中,虚拟中性点m的电压近似等于实际中性点n的电压值,所以通常以测量绕组端电压与虚拟中性点m之间的电压差的方法获取虚拟相电压,并将其近似等效为相反电势。通过对虚拟反电势的过零信息进行分析获得位置信号。
2 控制器硬件设计
无刷直流电机的整体控制系统框图如图3所示,主要由两部分组成。其中,控制及调速模块通过控制电路实现速度调节和换相逻辑控制,通过驱动电路对电机进行驱动;位置检测模块主要是通过获取反电势过零信号来估计转子位置,并反馈给控制电路,计算得到转速并更新换相逻辑状态。
ω为设定转速;为当前估计转速;i为根据速度计算出的期望电流大小;![]() 为当前导通状态;G为换相控制逻辑;Ux为某一相的端电压;BLDCM(brushless DC motor)为无刷直流电机。
为当前导通状态;G为换相控制逻辑;Ux为某一相的端电压;BLDCM(brushless DC motor)为无刷直流电机。
图3 无刷直流电机速度和转子位置估计系统框图
2.1 控制及调速模块
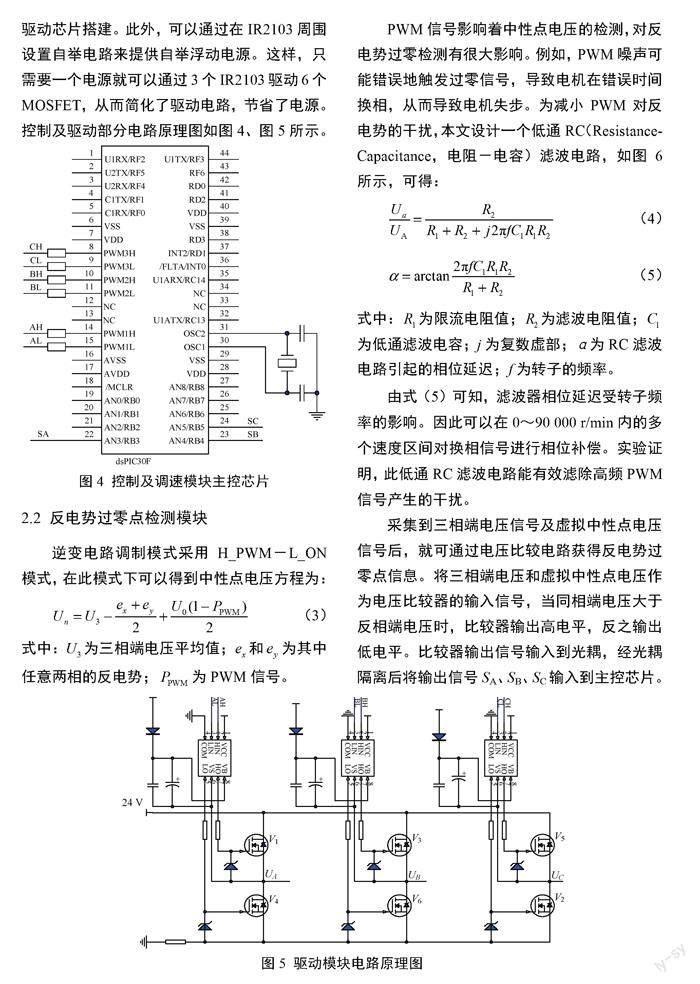
控制及调速模块选用专用于电机控制的16位高性能数字信号控制器dsPIC30F系列芯片作为主控芯片,并采用三相全桥式逆变电路对电机进行驱动。逆变电路中,高压侧MOSFET采用PWM模式,低压侧MOSFET采用恒通模式(H_PWM-L_ON模式)。由于dsPIC30F直接输出的PWM信号电压低、功率小,驱动能力不足,无法直接驱动无刷直流电机,所以需要在外围电路中搭建额外的驱动电路,提高PWM信号的驱动功率。驱动电路采用IR2103驱动芯片搭建。此外,可以通过在IR2103周围设置自举电路来提供自举浮动电源。这样,只需要一个电源就可以通过3个IR2103驱动6个MOSFET,从而简化了驱动电路,节省了电源。控制及驱动部分电路原理图如图4、图5所示。
2.2 反电势过零点检测模块
逆变电路调制模式采用H_PWM-L_ON模式,在此模式下可以得到中性点电压方程为:
(3)
式中:![]() 为三相端电压平均值;
为三相端电压平均值;![]() 和
和![]() 为其中任意两相的反电势;
为其中任意两相的反电势;![]() 為PWM信号。
為PWM信号。
PWM信号影响着中性点电压的检测,对反电势过零检测有很大影响。例如,PWM噪声可能错误地触发过零信号,导致电机在错误时间换相,从而导致电机失步。为减小PWM对反电势的干扰,本文设计一个低通RC(Resistance- Capacitance,电阻-电容)滤波电路,如图6所示,可得:
(4)
(5)
式中:![]() 为限流电阻值;
为限流电阻值;![]() 为滤波电阻值;
为滤波电阻值;![]() 为低通滤波电容;j为复数虚部;α为RC滤波电路引起的相位延迟;f为转子的频率。
为低通滤波电容;j为复数虚部;α为RC滤波电路引起的相位延迟;f为转子的频率。
由式(5)可知,滤波器相位延迟受转子频率的影响。因此可以在0~90 000 r/min内的多个速度区间对换相信号进行相位补偿。实验证明,此低通RC滤波电路能有效滤除高频PWM信号产生的干扰。
采集到三相端电压信号及虚拟中性点电压信号后,就可通过电压比较电路获得反电势过零点信息。将三相端电压和虚拟中性点电压作为电压比较器的输入信号,当同相端电压大于反相端电压时,比较器输出高电平,反之输出低电平。比较器输出信号输入到光耦,经光耦隔离后将输出信号SA、SB、SC输入到主控芯片。
UA、UB、UC为图1A、B、C点和地之间的电压;SA、SB、SC为光耦输出信号;Ua、Ub、Uc为三相端电压;1、2、3、4、8为放大器相应引脚。
图6 反电势过零检测电路的原理图
2.3 电路中的相位延迟
理想情况下,电机应当在过零点30°电角度后进行换相。通过dsPIC30F4011的定时器测量相邻两次过零事件发生的时间间隔,这一时间间隔对应60°电角度的时间。定时器计数值的一半对应30°电角度的时间,理论上,将这个值加载到另一个定时器的控制寄存器中,可用作换相定时器。当这一用于换相的定时器计数到寄存器中的值时产生中断,在中断服务程序中进行换相,则电机绕组就可以准确切换到下一个状态。
但是,实际电路中存在各种因素带来的相位延迟。首先是RC滤波电路的相位延迟,这是相位延迟的主要部分,它与电机转速相关。其次是光耦回路中其他电子元件产生的延迟,约为60 μs。最后是控制器中断服务程序带来的延迟,约为1.7 μs。需从30°电角度中减去每种延迟,对换相信号进行补偿后才能得到较准确的换相时刻。延迟的计算方式为:
(6)
式中:为周期寄存器的值,即检测到过零点后下一次换相的时间;为根据速度计算得到的30°电角度对应的计数器值;为RC滤波器相位延迟;为由元件引起相位延迟;为中断服务程序延迟。
3 控制器软件控制策略
3.1 软件系统框架
分子泵控制器的软件系统主要包括初始化、中断服务程序和子程序三部分。系统启动时,初始化部分会对控制系统接口、定时器、状态变量及其他参数进行初始化赋值。初始化完成后,程序进入主循环,根据输入信号状态机自动跳转,调用子程序并等待中断。中断部分实现了电流采样、通讯、换相、PWM中断等重要功能。子程序部分主要实现电机的启动及运行逻辑控制。
3.2 启动过程
为快速准确地升速至额定转速,电机采用了三段式启动方法,主要包括以下过程:
(1)预定位阶段。由于本文研究的电机结构中未安装位置传感器,转子的初始位置未知,所以需要使转子运动至预设位置。启动时,将PWM占空比初始化为一个较低的值,并将无刷直流电机的两相绕组短时间导通,可以使转子运动至目标预设位置。为防止绕组导通时产生的磁场方向与转子磁场方向相同或相反情况下预定位失败,可再次切换导通的两相定子绕组,进行二次预定位,提高预定位的成功率。
(2)开环升速阶段。在低转速时,反电势幅值较小,不易检测,无法识别到过零点位置信息,因此分子泵需要通过开环控制进行升速。通过设置PWM占空比和换相定时器的计数值,可以得到相应的初始电压和升速步长。这一过程中,转子转速受开环控制,并无转速反馈调节。随着转子转速提高,反电势幅值增大,控制器可以检测到明显的反电势过零点信号。
(3)闭环升速阶段。当通过开环升速至10 000 r/min时,程序可以在多个周期内稳定地检测到反电势过零点信号,通过计算可以获得速度反馈信息。此时的速度反馈可以作为PID(Proportional-Integral-Derivative,比例-积分-微分)控制器的输入实现对电机的闭环控制。升速过程中,为防止长时间过电流损坏电机和控制器,当电流较大时,绕组将短时间关断,调整控制参数后再次进入升速过程。
4 实验结果
本文在PCB(Printed Circuit Board,印刷电路板)上实现该电路原理,搭建了控制系统,并在实验平台上进行了一系列实验,来测试控制系统的性能。分子泵及其控制器实物如图7所示。控制器硬件部分由两块电路板组成,其中大尺寸电路板为驱动板,主要实现驱动功能,小尺寸电路板为控制板,主要实现反电势过零检测及控制功能。
本文对分子泵控制系统进行了实验测试,分子泵经预定位、开环加速和闭环加速这一三段式启动过程加速至90 000 r/min。
电机80 s内可达到额定转速90 000 r/min,稳定运行时转速波动不超过60 r/min。分子泵启动时的升速曲线如图8所示,可以看出,在初始开环升速阶段,电机的加速度逐步增大,分子泵在开环期间加速到10 000 r/min。在闭环升速过程中,电机的测量转速还是会有波动,通过大量实验证实了这与分子泵的振动有关。如果振动状态较差,反电势过零检測方法将难以检测到电机的真实转速。
由于没有安装位置传感器,为评价所设计的控制系统的性能,需采用其他辅助方法对电机转速进行测量。本文采用了示波器和振动监测系统两种方法对电机转速进行测量和计算。首先是通过光耦的输出信号,即过零检测的结果进行测量。三相比较输出对应的光耦合器的输出波形如图9所示。
SA、SB、SC这三个输出波形与比较器的输出信号相关。在测试平台上位机显示结果中,电机转速保持在90 000±60 r/min范围内,示波器分析反馈信号频率为1500±1 Hz。由图9可以看出,没有检测到错误的反电势过零事件。同时,利用振动监测系统对分子泵的径向和轴向振动进行了监测。结果表明,其振动频率在1500±1 Hz范围内。这也说明电机的转速波动在90 000±60 r/min范围内。
5 结论
本文设计了一种用于分子泵的无位置传感器无刷直流电机控制器。该控制器是基于反电势过零点位置检测方法设计。使用该控制器对分子泵进行驱动,其0~90 000 r/min升速时间为80 s,且稳态转速误差较小,在±60 r/min范围内。但实验中还存在一些不足,实验中的振动及其他因素会对位置检测产生一定影响,后续设计还有改进空间。
参考文献:
[1]王晓冬,巴德纯,杨乃恒. 矩形截面槽牵引分子泵分子流态下抽气特性的研究[J]. 真空,1999(2):12-14.
[2]赵树刚. 高速永磁无刷直流电动机及其控制系统的研究[D]. 济南:山东大学,2018.
[3]施晓青,王晓琳,徐同兴,等. 高速无刷直流电机自寻优换相校正策略[J]. 电工技术学报,2019,34(19):3997-4005.
[4]LIU G,CUI C,WANG K,et al. Sensorless Control for High-Speed Brushless DC Motor Based on the Line-to-Line Back EMF[J]. IEEE Transactions on Power Electronics,2016,31(7):4669-4683
[5]XIA Changliang,XIAO Youwen,CHEN Wei,et al. Torque Ripple Reduction in Brushless DC Drives Based on Reference Current Optimization Using Integral Variable Structure Control[J]. IEEE Transactions on Industrial Electronics,2013,61(2):738-752.
[6]SONG X,HAN B,ZHENG S,et al. High-precision Sensorless Drive for High-speed BLDC Motors based on the Virtual 3rd harmonic back-EMF[J]. IEEE Transactions on Power Electronics,2018,33(2):1528-1540.
[7]LI H,ZHENG S,REN H . Self-Correction ofCommutation Point for High-Speed Sensorless BLDC Motor With Low Inductance and Nonideal Back EMF[J]. IEEE Transactions on Power Electronics,2016,32(1):642-651.
[8]GU C,WANG X,SHI X,et al. A PLL Based Novel Commutation Correction Strategy for High-Speed Brushless DC Motor Sensorless Drive System[J]. IEEE Transactions on Industrial Electronics,2018,65(5):3752-3762.
[9]CUI C,LIU G,WANG K,et al. Sensorless Drive for High-Speed Brushless DC Motor Based on the Virtual Neutral Voltage[J]. Power Electronics IEEE Transactions on,2015,30(6):3275-3285.
[10]TSOTOULIDIS S,SAFACAS A N. Deployment of an Adaptable Sensorless Commutation Technique on BLDC Motor Drives Exploiting Zero Sequence Voltage[J]. Industrial Electronics IEEE Transactions on,2015,62(2):877-886.
[11]SAMOYLENKO N,QIANG H,JATSKEVICH J. Dynamic Performance of Brushless DC Motors With Unbalanced Hall Sensors[J]. IEEE Transactions on Energy Conversion,2008,23(3):752-763.
[12]LI W Z,FANG J C,LI H T,et al. Position Sensorless Control Without Phase Shifter for High-Speed BLDC Motors With Low Inductance and Nonideal Back EMF[J]. IEEE Transactions on Power Electronics,2015,31(2):1354-1366.
[13]ZHOU X,CHEN X,LU M,et al. Rapid Self-Compensation Method of Commutation Phase Error for Low- Inductance BLDC Motor[J]. IEEE Transactions on Industrial Informatics,2017,13(4):1833-1842.
[14]LAI Y S,LIN Y K. Novel Back-EMF Detection Technique of Brushless DC Motor Drives for Wide Range Control Without Using Current and Position Sensors[J]. IEEE Transactions on Power Electronics,2008,23(2):934-940.
[15]LEE W J,SUL S K. A New Starting Method of BLDC Motors Without Position Sensor[J]. IEEE Transactions on Industry Applications,2006,42(6):1532-1538.
[16]董富紅,杨春生,王辉,等. 无位置传感器无刷直流电机磁链函数控制方法[J]. 微电机(伺服技术),2006,39(6):26-27,41.
[17]史婷娜,肖竹欣,肖有文,等. 基于改进型滑模观测器的无刷直流电机无位置传感器控制[J]. 中国电机工程学报,2015,35(8):2043-2051.
[18]刘彦荣. 基于BP网络的无刷直流电机无位置传感器控制[D]. 天津:天津大学,2009.
