改进停止阈值准则的振动信号降噪方法研究
2024-01-31杨坤王桂宝王楠王磊李一飞
杨坤,王桂宝,王楠,王磊,李一飞
(1.陕西理工大学机械工程学院,陕西汉中 723001;2.陕西省工业自动化重点实验室,陕西汉中 723001)
0 前言
机械振动信号蕴含着设备运行过程中的重要信息,在监测旋转机械的运行状态时,通常需要采集设备机组主要部件的振动信号数据,如滚动轴承、齿轮箱、加速器等。并且根据这些数据,运用信号变换等理论把信号转换到频域内来处理,继而进行设备故障的监测与诊断[1]。在旋转机械设备的监测环境中,设备内部及外界都会产生较强的噪声,这些噪声信号不可避免地会掺杂到纯净的振动信号中,使得振动信号特征提取难度加大,继而会对信号分析处理结果产生负面影响[2]。
近年来,压缩感知理论为信号降噪这一方向提供了新思路。吕麒鹏等[3]在提取滚动轴承原始振动信号的故障频率时,由于该信号存在着强背景噪声,严重影响提取故障频率的效率,甚至还会提取到错误的故障频率,在使用压缩感知理论对原始振动信号进行降噪处理后,故障提取效率、准确性以及计算效率得到大幅提高。郭亮等人[4]利用Lasso 算法对压缩信号进行稀疏重构,恢复出振动信号,对于时变信号具有很好的压缩能力,并且能够有效地去除信号中的噪声成分。
在信号重构阶段使用最广泛的是正交匹配追踪算法,但是该算法的迭代误差会在迭代循环中继续传导,导致重构阶段所得信号的精度比较低[5]。此外,在信号降噪的迭代过程中,观测向量内积序列的主要成分为纯净信号的信息。经过多次迭代后,纯净信号成分逐渐被提取出来。迭代阈值选取不当的话,重构后的信号将包含大量的噪声成分[6]。
为了解决上述问题,本文作者提出一种改进停止阈值准则的正交匹配追踪(Improved Orthogonal Matching Pursuit,IOMP)算法,将其应用于振动信号的降噪阶段,并且根据不同类型信号的稀疏系数分布情况,计算出不同的迭代终止阈值ε,在经典重构算法中加入一种筛选判断条件。此判断机制可以避免误差的持续迭代,提高了重构信号的精确度。
目前在使用小波降噪理论处理非平稳振动信号时,需要设定阈值对分解系数进行处理,而阈值的设置恰当与否,很大程度上影响着降噪效果[7]。文中方法还可避免小波阈值设定的问题,通过对振动信号进行压缩投影和重构实现信号的降噪。因此,使用优化的降噪算法对噪声信号进行去噪处理,会提高后续信号处理结果的准确性。
1 基于压缩感知理论的信号降噪数学模型
1.1 噪声信号与观测矩阵的构造
首先定义一个不含噪声的振动信号x∈RN,定义另一个噪声信号为n∈RN,将这两个信号进行和运算得到含噪信号c=(x+n)∈RN。
选取一个观测矩阵,对原始信号先进行观测降维。文中采用的观测矩阵Φ∈RM×N(M <N)是随机高斯测量矩阵[8],该矩阵的每个元素独立服从均值为0、方差为1/M的高斯分布。即
含噪信号c在观测矩阵Φ下进行观测投影,得到的观测量y为
1.2 稀疏系数的分布
目前,用来进行信号稀疏表示的方法很多,对不同类型的信号使用不同的稀疏字典其效果是千差万别的[9]。而文中的研究对象主要是滚动轴承的振动信号,这种类型的信号在离散余弦变换[10]下具有不错的稀疏性,但是噪声信号不属于稀疏信号,故DCT(Discrete Cosine Transform)稀疏字典对噪声信号没有稀疏化的能力。在后续的观测阶段,振动信号会保存下来,然而噪声信号是不能恢复重构的。
DCT 字典矩阵Ψ∈RN×N的元素可通过式(3)进行计算;
由压缩感知理论知,若一维信号x2∈RN在DCT字典矩阵下是稀疏的,则信号x2在该字典矩阵下的稀疏表示为
式中:Ψ-1∈RN×N为稀疏矩阵;s∈RN×1为系数向量。
所以振动信号x和噪声信号n在DCT 字典矩阵下稀疏表示分别为式(5)(6)所示:
式中:s1和s2分别表示纯净振动信号和噪声信号。
在Ψ对应空间上的稀疏系数向量:
将式(5)和式(6)代入式(2)中可得
令A=Φ·Ψ-1,则
式中:A∈RM×N称为感知矩阵。
得到s1后,绘制该稀疏系数的分布直方图,再用正态分布检验的方法检验其是否服从正态分布;若服从,用式(11)(12)计算出s1的数学期望μ和标准差σ。
式中:n为信号的采样数目;pk是每个稀疏系数s1出现的概率。
再以3σ准则计算出的迭代终止阈值ε:
当更新残差的二范数小于迭代终止阈值ε时,即,则需要停止迭代循环,否则重构信号会包含大量的噪声,降噪效果会大幅降低。不同类型信号的稀疏系数分布情况是不同的,以3σ准则计算出的迭代终止阈值ε能将99.74%的稀疏系数按照大小关系区分开[11]。
在通常情况下,判断感知矩阵A是否满足约束等距条件是一个NP-hard 问题,因此文献[12]指出RIP 的等价条件为:若观测矩阵Φ与稀疏表示字典矩阵ψ不相关,即要求Φ的行向量不能由ψ的列向量表示,且ψ的列向量不能由Φ的行向量表示。如果矩阵Φ和矩阵ψ不相关,就可以应用相关重构算法得到稀疏向量s1的估计值,进而得到降噪后的重构信号。
1.3 OMP 重构算法及其改进方法
前面两个小节构造了观测矩阵和稀疏字典矩阵,满足振动信号可以使用压缩感知理论降噪的前提条件之后,接下来需要用重构算法求解如下的最优化问题:
为了求解此问题,可以将式(14)转化为式(15),这可以将零范数转化为l1范数问题
令A=ΦΨ,则式(15)可写为
与全样本一致,管理层能力对研发投入影响在国有组和民营组均表现为1%显著性水平的抑制作用。二者相关系数分别为-0.0755和-0.0518,这说明,虽然我们不能忽视高技术企业中国有经济占据较高比重的合理性,但国营企业繁冗的决策机制与治理架构,加之经营目标的多元性,可能使高能力管理者进行高风险创新活动的意愿更低,验证了假设1b。
对于上述问题,目前较多使用OMP 算法来求解,得到稀疏向量的估计值后,代入式(4)便可恢复出原始纯净的振动信号。
但是在OMP 算法的迭代运算中,迭代误差将会在下次循环中继续传导,导致该算法的稳定性较差[13],因此本文作者将一种改进停止阈值准则的OMP 运用到压缩感知的解码端。为了改进该算法的重构效果,在求解最小二乘解的步骤之后加入了筛选判断条件[14],并加入迭代终止阈值ε。此判断机制可以避免误差的持续迭代,提高了重构信号的精确度;迭代终止阈值ε能够确保只将振动信号的主要信息恢复出来,把噪声成分在观测投影的过程中丢弃,并且在重构的过程中不提取出来,使得重构信号既保留原始纯净信号的主要特征,又具有较好的去噪效果,且不降低重构精度;因此确定迭代终止阈值ε非常重要。
首先给出改进终止阈值准则的OMP 算法的步骤如下:
由上述步骤可以得到如图1 所示的改进终止阈值准则的OMP 算法流程。由此基于压缩感知理论的振动信号降噪模型建立完成,下文将采用仿真信号与实测信号相结合的方法探究所提改进方法的可行性和有效性。

图1 改进终止阈值准则的OMP 算法流程Fig.1 OMP algorithm flowchart to improve termination threshold guidelines
2 试验验证
2.1 仿真信号验证
为了模拟滚动轴承振动信号的真实工况,可以定义仿真信号[15]进行数值模拟的仿真分析,如式(20)所示:
式中:x(t)=2sin(2π×ft1nT)×5.5sin(2π×ft2nT)+4sin(2π×ft3nT);n(t)为SNR 为2 dB 的高斯白噪声;采样间隔T=1/4 000 s;采样数n=1 000;组成x(t)的频率分量分别为ft1=50 Hz,ft2=1 600 Hz,ft3=20 Hz。x(t)与n(t)的信号波形如图2、3所示。
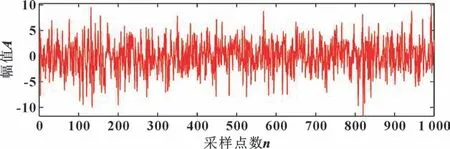
图3 高斯白噪声信号的时域波形Fig.3 Time domain waveform of a white Gaussian noise signal
然后将这两种信号进行和运算得到带噪信号y(t)的波形,如图4 所示。3 种信号的定义完成后,则需对其稀疏性进行分析。首先利用DCT 字典矩阵将信号进行稀疏表示,得到纯净信号与高斯噪声信号稀疏系数分别如图5、6 所示,可以看出:这两种信号经过字典稀疏表示后,原始信号x(t)大量的稀疏系数都是较小值,接近于零值上下浮动,只有极个别的数值较大;反观噪声信号的稀疏系数并没有在零值上下浮动,数值较大,接近零的值很少。这表明DCT字典矩阵对x(t)的稀疏表示效果非常好,对n(t)并没有很好的稀疏性。
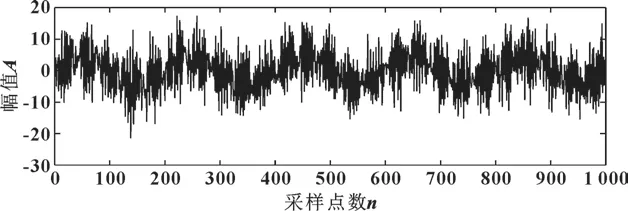
图4 带噪信号时域波形Fig.4 Time domain waveform with noisy signal

图5 纯净仿真信号的稀疏表示系数向量Fig.5 Sparse represented coefficient vector for pure simulated signal
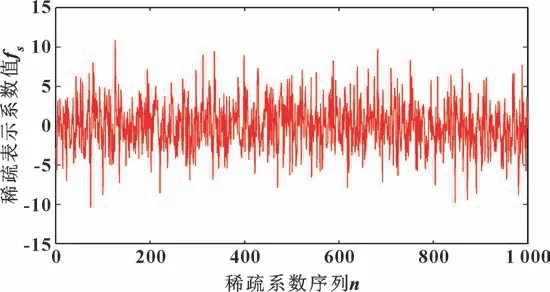
图6 高斯噪声信号的稀疏表示系数向量Fig.6 Sparse represented coefficient vector for Gaussian noise signal
为了详细掌握稀疏系数s1的分布范围,则需要画出该组系数的频数分布直方图如图7 所示。可清晰地发现,大量数值分布在零值附近,并且分布情况也近似满足正态分布曲线。

图7 纯净仿真信号的稀疏表示系数分布Fig.7 Sparse represented coefficient distribution of pure simulated signal

图8 纯净仿真信号的正态分布检验图Fig.8 Normal distribution test plot of pure simulated signal
然后分别应用正交匹配追踪(Orthogonal Matching Pursuit,OMP)算法和改进停止阈值准则的正交匹配追踪算法对带噪信号进行降噪,得到两种方法的降噪信号波形如图9、10 所示。可知:改进停止阈值准则的正交匹配追踪算法所重构的信号明显比正交匹配追踪算法所重构信号的时域波形更接近于原始纯净的信号。

图9 OMP 算法降噪信号时域波形Fig.9 OMP algorithm noise reduction signal time domain waveform

图10 改进停止阈值准则OMP 算法降噪信号波形Fig.10 Improved stop threshold criterion OMP algorithm noise reduction signal waveform
为了进一步评判降噪效果,可以定义信噪比(Signal to Noise Ratio,SNR)来衡量降噪性能的高低:
计算结果如表1 所示,可知:降噪前信号的信噪比为-1.025 7 dB,使用OMP 重构算法降噪后信号的信噪比为1.292 5 dB,使用改进停止阈值准则的OMP重构算法降噪后信号的信噪比为2.054 9 dB。通过对比可以看出,使用文中降噪方法可有效提升信号的信噪比,并且重构信号所需的观测量远小于其他降噪方法,从而验证了所提降噪方法的有效性。

表1 不同重构算法降噪信号的信噪比Tab.1 Signal to noise ratio of denoised signals by different reconstruction algorithms
2.2 实测振动信号验证
旋转机械设备的运行状态复杂多变,这些设备的振动信号大多属于非平稳信号。这类信号的统计特性都随着时间变化而变化,因此降噪难度比较高。
下面使用实测振动信号来检验方法的效果,试验中采用的实测信号来源于美国凯斯西储大学轴承实验中心[16],轴承型号为6205-2RS JEK SKF 深沟球轴承,采样频率为12 kHz,转速为1 750 r/min,负载746 W(2 HP),该振动信号的时域波形如图11 所示。在该信号中加入高斯白噪声形成强噪声背景下的带噪信号,如图12 所示。

图11 实测振动信号波形Fig.11 Measured vibration signal waveform

图12 带噪信号时域波形Fig.12 Time domain waveform with noise signal
实测振动信号在DCT 字典下的稀疏表示如图13所示,可以发现:0-400 之间的稀疏表示系数值不为零的较多,400-1 000 之间的系数接近于零值上下浮动。这是因为实测信号属于随机信号,这类信号的统计特性都随着时间变化而变化,因此稀疏性不比仿真定义的信号好。这就为重构算法提出了苛刻的条件。

图13 实测振动信号的稀疏表示系数向量Fig.13 Sparse represented coefficient vector for measured vibration signal
为了进一步检验该组数据是否满足正态分布,需要对其进行正态分布检验,得到图14,其中横轴为变量区间,纵轴为累计概率分布,红色点划线是以稀疏系数s1的数学期望μ=0.074 0 和标准差σ=0.001 2构建的标准正态分布线,如果蓝色数据样本点越接近红色点划线,则说明样本点的正态特性越好。由图14 可知:70%~80%数据样本点都分布在红色点划线上,20%~30%的数据样本点远离红色点划线。因此该组数据是服从μ=0.074 0、σ=0.001 2 的正态分布,从而得到迭代终止阈值ε=0.434。

图14 实测振动信号的正态分布检验图Fig.14 Normal distribution test plot for measured vibration signal
然后分别应用正交匹配追踪算法和改进停止阈值准则的正交匹配追踪算法对带噪信号进行降噪,得到两种方法的降噪信号波形如图15、16 所示。可知:改进停止阈值准则的正交匹配追踪算法所重构的信号明显比正交匹配追踪算法所重构的信号在纵坐标幅值的大小和波形方面更接近原始的实测振动信号。

图15 OMP 算法降噪信号时域波形Fig.15 OMP algorithm noise reduction signal time domain waveform

图16 改进停止阈值准则的OMP 算法降噪信号Fig.16 Improved OMP algorithm for noise reduction based on stop threshold criterion
定量地评判降噪效果,则可以定义信噪比(SNR)和均方误差(Mean Square Error,MSE)两个指标来衡量降噪性能。信噪比的定义为式(21),均方误差见式(22):
经过计算,降噪前信号的信噪比为-1.268 dB,降噪后信号的信噪比是2.541 8 dB、均方误差MSE为0.030。由此可知,文中方法可以有效提升实测振动信号的信噪比,减小均方误差,从而得证文中所提的降噪方法同样适用于实测滚动轴承振动信号的降噪。
为了比较经典重构算法与文中所提方法降噪效果的区别,下面使用子空间追踪法(Subspace Pursuit,SP)、正交匹配追踪法(Orthogonal Matching Pursuit,OMP)、分段弱正交匹配追踪法(Stage wise Weak Orthogonal Matching Pursuit,SWOMP)3 种重构算法在相同条件下进行信号降噪。
结果如表2 所示。降噪后的信号信噪比最大,则认为该方法的降噪效果越好;均方误差越小,则认为降噪后的信号越接近原始纯净信号。SP、OMP、SWOMP 三种方法降噪信号的信噪比分别为0.330 8、1.664 2、1.990 7 dB,均方误差MSE 分别为0.074 2、0.055 7、0.045。显而易见,改进停止阈值准则的正交匹配追踪法优于SP、OMP、SWOMP 三种降噪方法,可以获得较好的降噪效果。

表2 不同重构算法降噪信号的SNR 和MSETab.2 SNR and MSE of noise reduction signal with different reconstruction algorithms
3 结论
本文作者针对OMP 算法迭代误差会在迭代循环中继续传导、终止阈值选取不当导致信号成分和噪声成分发生混叠等问题,提出一种改进停止阈值准则的正交匹配追踪算法,建立基于压缩感知理论的振动信号降噪模型。
通过对仿真信号的降噪分析,提升了带噪信号的信噪比,验证了该方法的有效性;然后对深沟球轴承的实测振动信号进行降噪处理,在强噪声背景下信号的信噪比提升到2.541 8 dB、均方误差减小到0.030。并且和其他重构算法降噪后重构信号的结果作比较,表明文中所提方法的有效性与优越性,并且信号经过稀疏表示后,所需要处理的数据量远小于其他降噪方法。
