一个无人机轻小型快递投送系统的设计
2024-01-26苑航樊骐恺刘佳裔王金宇郭昂朋田鑫何苗青石莹莹张虎
苑航 樊骐恺 刘佳裔 王金宇 郭昂朋 田鑫 何苗青 石莹莹 张虎


摘要:在无人机广泛使用的环境下,结合校园实际,在四旋翼无人机的应用基础上,结合快递取件的无人接触的需求,项目完成了一个无人机轻小型快递投送系统的设计。项目以无人机为基础设备,在完成硬件设计的基础上,完成了应用程序的开发,实现了商家、快递点、用户之间的无接触投送接收,最大限度地降低了人力成本,提高了快递投送、接收的效率。
关键词:无人机;快递投递;飞行控制;信息系统
中图分类号:TP311 文獻标识码:A
文章编号:1009-3044(2023)35-0107-03
开放科学(资源服务)标识码(OSID)
1 项目设计背景和内容
伴随无人机技术的飞速发展,无人机的行业使用范围已经扩大到各种民生领域,从日常的航拍、农林业的农药喷洒到公安、消防等,都已经广泛使用无人机技术及设备。
为了解决无接触式的快递取送,本文基于无人机设备和Web程序设计了一个轻小型快递投送系统,希望通过互联网+无人机的手段实现零接触配送,实现真正意义上的零人员流动的同时也充分保障外卖、网购物品的取件需求,解决商家(快递点)、外卖点到学生取件的“最后一公里”问题。
2 配送无人机原理与设计选型
2.1 配送无人机设计原理
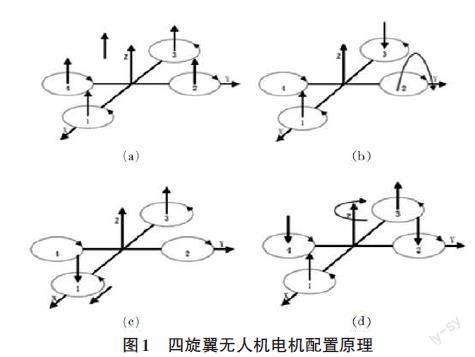
目前主流的无人飞行器主要有以下几种:无人型固定翼无人机、无人型直升机、无人型多旋翼无人机、无人型伞翼机和扑翼型微型无人机等[1],其中无人型多旋翼飞行器结构最为简单,动力系统只需要驱动电机,通过桨叶旋转提供的动力就能够实现垂直起降、飞行,机械结构简单,虽然续航时间短、载荷小,但完全能够满足基本的快递取件的投递工作。本项目以四旋翼无人机为设计实现,四旋翼无人机不仅能够垂直起降和稳定的悬停,而且具有飞行损耗小、制造成本低、机动性能强。四台电机配置原理如图1所示。
无人机在空中飞行过程中是依靠旋翼桨叶的旋转运动引起空气的运动而产生的推动力实现飞行,根据各桨叶运动的状态产生的推力不同形成前后、垂直、俯仰和偏航飞行运动模态。无人机的最基本飞行运动是垂直起降,实现飞行器的起飞和降落。以四旋翼无人机为例,垂直起飞时,同时增加四个旋翼桨叶对应电机的输出功率,电机的大功率输出带动桨叶转速加大,气流运动加快,当克服自身重力值即可实现向上起飞。需要下降时,逐渐降低电机的转速,气流产生的向上推力小于无人机自身重力时,实现降落的动作,当转速达到一定值时,向上的推力等于机身重力,即可实现在空中悬停的动作,如图1(a) 所示。当无人机改变飞行方向时,要通过俯仰运动实现方向的改变,如图1(b) 所示。在对角线上的电机1的转速增加的同时降低电机3的转速,其他电机转速保持不变,使得对角线上的两个电机的转速产生差值,原本在一个平面上的推力出现不平衡状态,导致无人机的整体受力朝空间坐标中的Y 轴方向倾斜,即实现无人机仰俯运动。俯仰飞行动作可分为向上仰飞和向下俯冲飞行,两种飞行动作原理完全相同,只是电机输出功率变化值的差异。无人机水平方向的飞行可以细化为前后、左右、斜向飞行动作,如图1(c) 所示。飞行原理与俯仰飞行类似,均为通过一条对角线上电机的转速变化,引起四个电机在水平面上产生推力的变化,产生飞行仰角,从而实现水平方向的飞行,比如在图1(c) 中增加电机3转速并减小电机1的转速,而2和4号电机的转速保持不变,无人机原本在水平面上四个推力平衡的状态被打破,四个旋翼的推力平面产生仰角,即实现在水平面内的飞行。无人机的偏航飞行时,如图1(d) 所示,在增加主对角线上两个电机的转速的同时降低副对角方向上两个电机的转速,并保证增加值大于减小值,无人机在不平衡受力的作用下即实现的偏航飞行。
2.2 配送无人机的设计要求
载荷的计算,要通过电机的输出功率、桨叶的配合计算,实现载荷大小的值[2]。电机的选用:根据起飞重量及载荷重量计算所需电机的功率。电机的KV值是决定电机升力扭矩的关键值。电机线圈绕线粗、匝数少、转速快,但扭矩小,所以升力小载荷小,反之,扭矩大、载荷相对较大。桨叶的选择要与电机匹配。受空气动力的影响,桨叶的直径、面积受阻力影响,直接关系飞行的质量。桨叶的运动产生向上及横向的推力,横向推力越小越好,所以,在四旋翼无人机设计时,对角电机方向相反,相互抵消横向推力。无人机载荷大,升力扭矩要求高,所以要选择KV值低、桨叶稍大的配置,选用细长的柳叶型桨叶能够有效提高电机、桨叶的工作效率。
设计要求:轴距不大于500mm,飞行半径不大于100m,飞行高度不大于30m,载荷重量不大于2kg,飞行控制模式:手动,操作方式:遥控器、手机、笔记本电脑。其中,机械部分包含电机、桨叶、电池组、电子调速器、电调连接板、通信模块、飞行控制模块等,无人机机械部分应带有保护罩,既保护周边人员,也保护桨叶的安全,同时要配备防脱钩装置,实现所承载快递物品的防脱落安全保障。飞行控制单片机选择STM32F103CX进行设计,设计中包括电源模块、复位电路、电源指示灯电路和晶振电路,通过稳压芯片提供3.3伏电压给芯片供电。姿态传感器模块采用MPU6050芯片,内部集成了4轴陀螺仪和4轴加速度计,输出16 位的数字量的信号,通过IIC总线和单片机进行数据交互。单片机通过读取姿态传感器数值解算出当前姿态,然后控制电机保证飞行姿态稳定。
无人机飞行控制开发平台的飞控核心及遥控器之间数据使用NORDIC公司生产的nRF24L01通信模块进行无线传输,通过SPI 总线读取遥控器数据并传输给无人机,由于直接采用了整体模块,故只需接入SPI总线即可。
电池组电量监视模块采用液晶显示模块实现人机交互,采样模块采集无人机电池组的电压信息。当无人机电池组电压低于3.6伏时,保护装置显示提示信息并发出蜂鸣声,提示操作员尽快降落无人机,避免因电量下降导致的坠机风险。
2.3 无人机安全作业注意事项
1) 参与快递送收的无人机必须符合中国民用航空局飞行标准司签发的《轻小无人机运行规定(试行)》的相关规定;
2) 飞行范围应严格按照作业方案执行,飞行距离控制在视距范围内,可视距离内不得有树木等障碍物;
3) 飞行配送应远离人群,飞行作业时,若地面有其他人员,要停止飞行;
4) 起降飞行应远离障碍物,平行飞行应远离障碍物10m以上,并作相应减速飞行;
5) 无人机操作员应佩戴安全帽、防眩光眼镜、身穿反光背心,在上风口并背对太阳执行飞行作业;
6) 无人机操作员应与无人机保持3m以上安全距离,作业过程中操控人员应关闭手机及其他所有电磁干扰设备;
7) 对无人机进行维护保养时,必须切断动力电源,避免意外启动,防止事故的发生。
3 配送软件设计
在配送无人机设计完成后,开发出配送应用程序,实现商家、用户之间的数据桥梁。
3.1 设计需求
根据校内外快递配送存在的问题,项目组对配送的需求和实际情况进行了线下商家和网上信息的综合调查,总结出项目的设计需求:
1) 项目要有管理员、商家(快递点)、学生用户角色的注册和登录功能,且各角色用户账号名称唯一;
2) 快递信息记录完整,并能够在系统中完整显示,商家(快递点)能够对信息进行实时查询,并能够对自己所录入的内容进行修改、添加;
3) 系统管理员可以添加商家(快递点),商家(快递点)可添加、修改订单信息、联系方式等;
4) 管理员有最大权限,可以添加新管理员成员进系统,还可以修改、删除其他两种角色用户的基本信息;
5) 由商家发起任务,然后用户选择配送时间、配送地点、配送方式等,用户手动完成任务或无人机返回确定信息并超时后系统自动完成订单。
3.2 软件功能设计
主要包括,登录功能,注册功能,订单信息的增删改查(其中包括与无人机信息的交互),用户管理功能。不同用户类型权限不同,如图2所示。
3.3 系统编码设计及分页实现
本系统编码采用UTF-8编码格式实现,UTF-8编码格式可以用来表示Unicode标准中的任何字符,其低八位的编码与 ASCII码相同,从而兼容ASCII字符软件。分页设计通过后台数据库SQL语句分页获取数据,然后使用limit关键字来实现分页操作[4]。
3.4 系统注册与登录功能
本系统的Tomcat端口号设置为8080,程序启动后,在浏览器地址输入栏中输入localhost: 8080/index.jsp即打开项目系统的首页。首次用户登录该系统后,首先需要注册用户,成功后才可以登录使用师生用户或商家用户后台系统进行内容编辑。管理员账号为超级管理员设置。初始管理员在数据库表中自行添加字段,之后可通过设置添加管理员成员协助系统维护,可对师生用户、商家用户和订单进行管理操作。
3.5 系统用户和权限设计
设计为三种用户,超级管理员、商家(快递点)、普通用户。超级管理员可以对所有航线任务信息及飞行记录信息进行增删改查,也可以对无人机信息的增删改查;商家(快递点)仅可对自己的任务有关信息进行查询、创建和修改,在确定具体的某一单任务时候对无人机状态进行查询和更改;普通用户仅可查询和完成自己所属订单。
3.6 订单信息的增删改查
对具体的某一单信息进行管理,同时系统需要在用户对系统信息更新后实时调用无人机系统的API对无人机的航线等进行控制。包括具体功能如下4项。系统需要保证功能实现过程中数据流动的稳定,也要保证用户展示信息的实时性和对无人机操控的稳定性[4],如图3所示。
1) 无人机航线任务管理功能
主要包括航线的添加、编辑和删除。点击添加任务,即可开始设置航线,保存航线之后即可在飞行计划列表查看任务。进入添加页面后点击绘制即可进行任务的绘制。选取航线的起始点和结束点即可。到达结束点完成任务后自动返航。设置无人机的任务名称、飞行高度、飞行速度和指定无人机服务用户。设置航线上每个航点的动作并对飞行投递任务信息进行修改[5]。
2) 人机地图及信息查询功能
包括所有无人机实时视频画面和无人机实时轨迹。商家和普通用户也可通过选择框切换为自己所属订单服务的无人机视频直播源。包含无人机实时轨迹,无人机经过会在地图绘制路线,直观显示无人机的飞行轨迹。页面底部设计表格显示无人机实时数据,提供地图实时轨迹和图传。
3) 飞行记录查询功能
主要用于对无人机记录以轨迹回放的形式进行展示,对无人飞行速度和飞行高度进行曲线统计。无人机视频回传结束后,即可自动保存本次服务实时视频到服务器,并且在视频回放页面生成数据,提供在线观看以及下载,以便于后期对该次快递服务进行控制以及管理。
4) 无人机列表、用户、商家列表等基础信息表的展示
在数据表的设计中,无人机表对无人机的型号、状态、电量和各关键零部件状态的重要信息进行展示。用户表、商家表则对用户的关键信息进行展示。该功能仅超级管理员拥有权限,便于对整个系统的信息进行管理。
3.7 用户管理功能
超级管理员可在此处对所有用户的信息进行修改,目前商家用户和普通用户作为两类用户分开管理降低耦合度,后期系统升级和完善过程中可通过登录时选择不同登录状态进入不同页面,便于用户对于该系统的使用。
4 结束语
本投送系统以无人机设备为基础,采用SSH为主
导框架实现应用的程序设计。程序具有结构清晰、复用性、维护和升级换代方便的特点,SSH框架基于MVC设计模式,实现了控制器、视图与模型的完全分离,并且业务逻辑层与持久层也实现了分离,无论前端如何变化,模型层只需改动部分代码即可完成,数据库的变化也不会对前段界面布局有影响,提高了系统的可复用性。降低了系统的耦合度,便于开发效率的提高。业务逻辑层通过调用无人机设备所提供的相关API实现对无人机的载荷控制、飞行控制、寻路控制等大大简化了项目的复杂度。技术的优越性保证了系统的功能完善和用户体验时的安全,相信在未来的不断发展中,轻小型快递投送系统会不断进行完善和发展,从而更好地为人们提供服务。
参考文献:
[1] 张胜逊,戴伟军.无人机综合应用[M].武汉:华中科技大学出版社,2020.
[2] 付少帅,李玢.无人机快递系统专利分析[J].科技創新与应用,2019(30):5-6.
[3] 谷志峰,李同伟.JSP程序设计实例教程[M].北京:电子工业出版社,2017.
[4] 杜洋,刘洪辰.自动化无人机快递配送系统研究[J].科技传播,2016,8(10):96-97.
[5] 徐富元,杨蔚,祁友杰,等.一种利用可见光载荷实现运动目标搜索的方法[J].航天电子对抗,2017,33(2):22-25,44.
【通联编辑:闻翔军】
